February 5, 2024
Developing A Truly Global RTK Network
How GEODNET’s blockchain-based decentralized network approach is scaling global GNSS correction network density and coverage.
By Inside GNSSGlobal Navigation Satellite Systems Engineering, Policy, and Design
How GEODNET’s blockchain-based decentralized network approach is scaling global GNSS correction network density and coverage.
By Inside GNSS
This study examines the frequency, type and severity of interference events at specific locations in the country, providing valuable insights into the use of detectors, the nature of interference encountered, their potential sources and the impact on GNSS-derived positions.
By Inside GNSS
A look at recent testing and the advantages of using KF tracking to process GNSS meta-signals.
By Daniele Borio and Melania Susi
A close look at several options that identify potential improvements at system level for a reasonable increase in complexity.
By Inside GNSS
A comparison against classic models.
By Inside GNSS
Guest contributors Darioosh Naderi and Mark Marshall of Silicon Sensing look at how far the technology has come and why it’s poised to disrupt the market.
By Andrey Soloviev
Businesspeople, politicians, civil servants and a range of engineers and researchers gathered in Brussels for the 15th European Space Conference in January. Topics were many and varied, with war, dependency, resilience and a big-time launcher crisis heading the list.
By Peter Gutierrez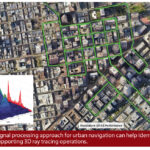
Identifying multipath reflectors for validating ray tracing in urban canyons.
By Inside GNSS

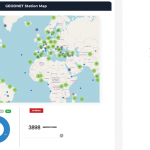
Identifying seismic signals in GNSS reference stations using machine learning.
By Inside GNSS
A: While GPS satellite faults have always been infrequent, they have become rarer in the past decade due to the maturity of the GPS constellation and its Operational Control Segment (OCS). Lessons learned from past GPS satellite failures have also aided the development of newer GNSS constellations such as the European Galileo.
By Inside GNSS
A look at the state of 5G NR NTN.
By Dawn M.K. Zoldi (Colonel, USAF, Ret.)
This is the most efficient way to combine INS with aiding data. Here’s a look at the key principles and benefits.
By Andrey Soloviev