
Inside GNSS’s resident inertial expert examines coasting over GNSS outages, navigation in challenged environments and interference mitigation in a sensor-fusion environment.
As positioning experts search for ways to fill GNSS vulnerability gaps, many alternative navigation sources and sensors present themselves, each with their own limitations. No single technology provides accurate and reliable positioning, navigation, and timing anywhere anytime. Instead, we must combine complementary benefits of different navigation aids via sensor fusion.
How do we build a sensor-fusion system? Nearly all nav aids derive information from some external sources that may not be always available. One notable exception provides a completely self-contained solution. It is inertial navigation. An inertial navigation system (INS) measures non-gravitational accelerations and angular rates and integrates them into navigation outputs. The underlying physical effects are always there, and the system can operate in any environment at any time.
As a result, robust and reliable positioning anywhere anytime can be enabled by INS-centric sensor fusion that seamlessly ties together various navigation aids around inertial. In this case, INS servesas a core sensor to provide navigation outputs while other (environment-dependent) navigation sensors provide aiding data to reduce drift in inertial navigation outputs. Such complementary fusion enables
• seamless addition of aiding data, when and if available;
• solution continuity in various environments;
• and robust and resilient state estimation in contested environments where corrupted measurements (e.g., non-line-of-sight GNSS multipath) are mitigated using INS-based screening.
Recent advances in inertial navigation technology and, especially in micro-electromechanical inertial measurement units (MEMS IMUs), make it possible to find a suitable IMU option for a wide range of applications, from a $2-3 level consumer-grade to tactical-grade to navigation-grade. As a result, inertial navigation is already at the core of many existing systems and its use will continue to expand in the future.
In the first issue of this column, we look more closely at the claim that there is an INS option for every budget.
Sure, there are relatively expensive IMUs that can be used, but are there any navigation-related benefits of inertial sensors that cost only a few dollars?
Benefits of Consumer-Grade MEMS
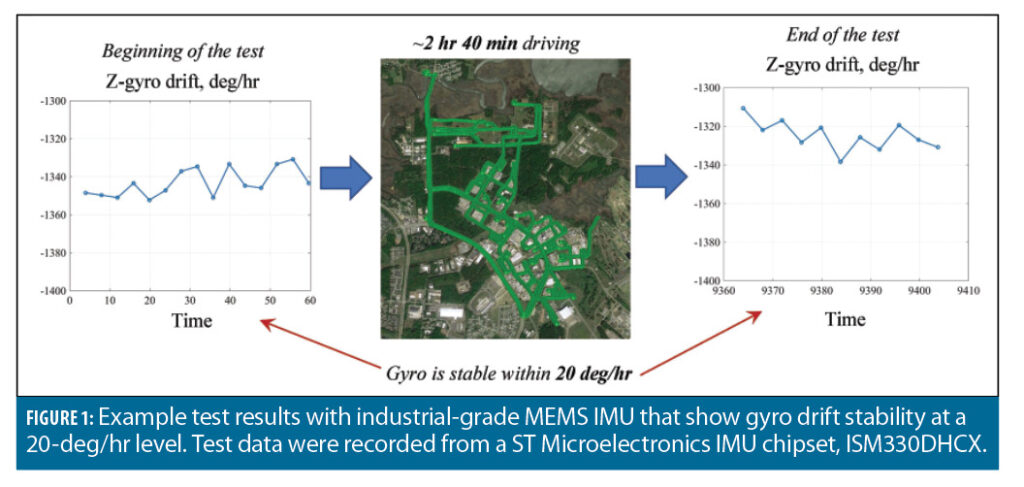
Fortunately, performance of consumer-grade MEMS sensors has continued to improve. To illustrate, Figure 1 shows stability of an industrial-grade MEMS gyroscope.
The turn-on drift value can be still quite large. Yet this drift is stable and can be efficiently calibrated out during the initialization phase, when the system is at rest. Residual stochastic variations stay at a 20 deg/hr level, which is sufficient to enable substantial benefits from the navigation perspective. These include:
• Coasting over GNSS outages;
• Reliable navigation in harsh GNSS environments such as dense urban canyons; and,
• Interference mitigation, including jamming suppression and protection against spoofing attacks.
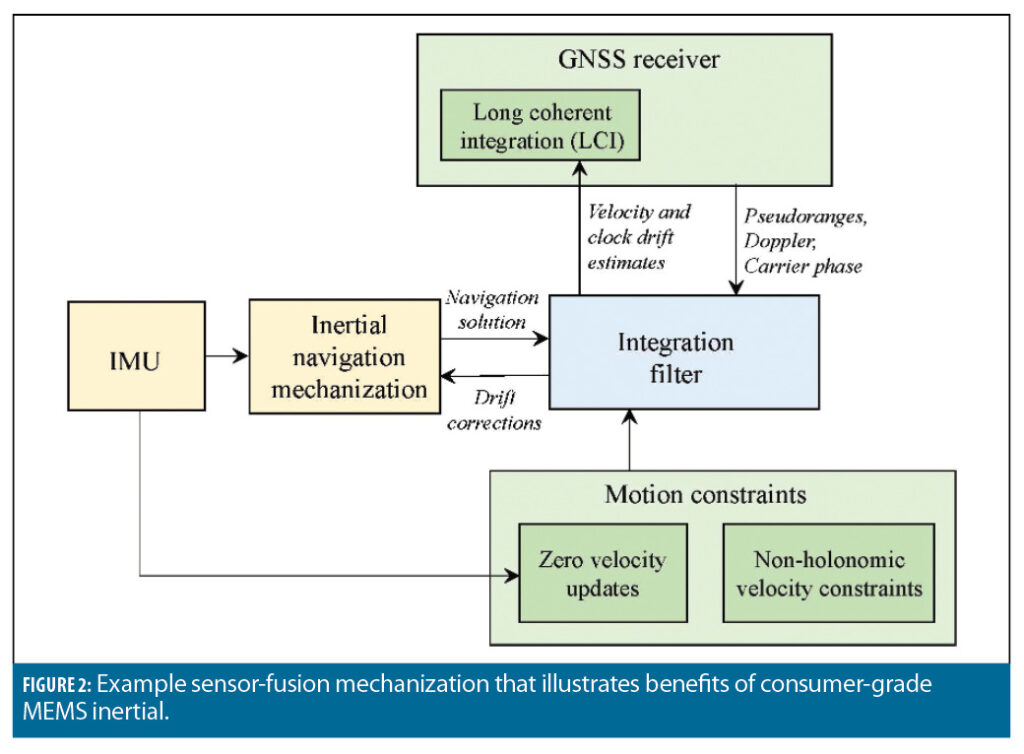
Figure 2 illustrates these benefits for ground-vehicle applications, showing a high-level architecture of an example INS-centric sensor-fusion system.
This system combines inertial with GNSS measurements (pseudoranges, Doppler, carrier phase) and ground-vehicle motion constraints (including zero velocity updates, as well as zero lateral and vertical velocity constraints). The integration filter fuses INS with aiding sources utilizing a complementary sensor-fusion concept. Instead of estimating navigation states themselves, it estimates errors in navigation states.

This process
• enables efficient linearization of system relations such that the integration filter can be implemented in a form of computationally-efficient extended Kalman filter (EKF);
• and substantially simplifies dynamic-state modeling since slowly-changing INS errors can be modeled much more reliably as compared to fast-changing navigation states.
EKF measurement observations are formulated as differences between the actual measurements and their INS-based predictions. Furthermore, comparison of INS predictions with actual measurements provides a very efficient tool for detection and removal of outliers in aiding data (e.g., GNSS multipath or unreliable velocity constraints during sharp turns).
In addition to fusion of inertial with aiding sources at the measurement level (commonly referred to as tight coupling), the sensor fusion architecture in Figure 2 also supports data fusion at the signal-processing level or deep coupling. Deep coupling enables extremely long coherent integration (LCI) of received GNSS signals: 1 second and beyond vs. 20 ms in a traditional receiver architecture. This
• narrows the signal processing bandwidth thus eliminating spoofing, and
• boosts the received signal power while averaging out noise and interference.
LCI is made possible and practical by accurate aiding of the GNSS signal accumulation from a consumer-grade INS that benefits in turn from sustained GNSS updating.
Coasting Over GNSS Outages
Figure 3 shows example coasting performance. In this case, a tightly coupled implementation (without the deep integration component) is used. Experimental results here were produced with an off-the-shelf GNSS receiver chipset (u-blox M8T), ST Micro MEMS IMU (ISM330DHCX) and QuNav’s embedded GNSS/Inertial Vehicular Engine (GIVE) software.
Figure 3(a) shows trajectory estimates for a tunnel test with two complete outages that lasted about 30–40 seconds. Figure 3(b) shows a significantly longer outage case, where the vehicle was driven in an underground parking garage for over 5 minutes. Position outputs from GNSS/INS and GNSS/INS/motion constraint integration options are shown.
Relatively short GNSS outages (about 30 seconds) can be reliably bridged over with INS only. However, for longer outage durations, performance starts to degrade as shown in Figure 3(b). The outage duration can be extended substantially if the INS aiding sources are further augmented with motion constraints. In this case, the system can sustain a long GNSS outage (5 minutes) while limiting position errors to a level of about 10 meters.
GNSS-Challenged Environments
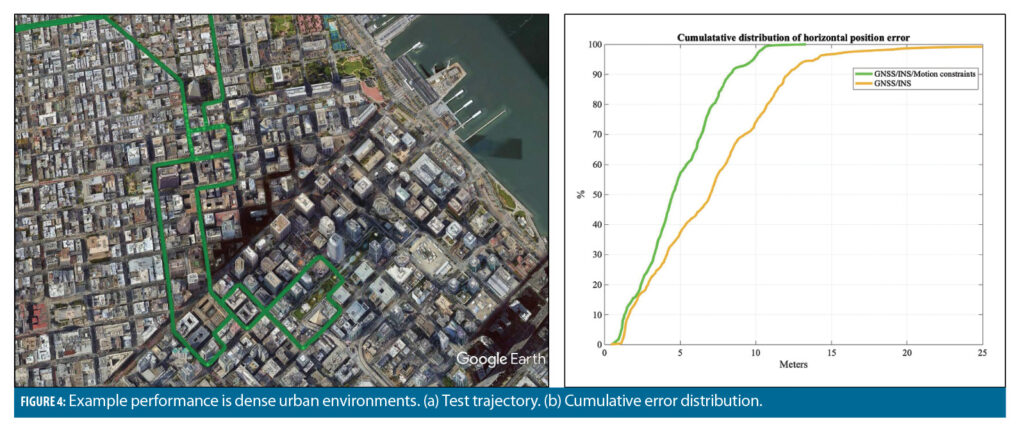
Figure 4 shows example test results in dense urban environments (downtown San Francisco). Again, a tightly coupled sensor-fusion option was used with u-blox GNSS, ST Micro IMU and QuNav sensor-fusion. Position output from Novatel SPAN (using tactical grade IMU and generated in post-processing mode) was used for truthing.
Test results demonstrate that the motion-constrained INS integration option limits position errors to 4 meters (at a 50% error bound) and 10 m (at a 99% error probability) in very difficult GNSS environments in dense urban canyons under severe multipath.
Interference Mitigation
Deep integration of INS-centric sensor fusion with GNSS enables mitigation of jamming signals and suppression of spoofing attacks in a small form-factor system that does not need to use multi-element antenna arrays. As mentioned previously, deep integration applies inertial aiding to significantly increase the accumulation interval of received GNSS signals. For example, an LCI of 1 second can be maintained.
The use of LCI is extremely beneficial for mitigating spoofing attacks, thus protecting open-service GNSS signals. Specifically, the signal processing bandwidth is reduced to 1 Hz or less. This makes it extremely difficult to launch a successful attack since the spoofer has to be able to
• track the receiver motion and clock states at a sub-Hz level (or, equivalently, sub-decimeter-per-second level of precision);
• and align its signal to the authentic one at the same level of precision.
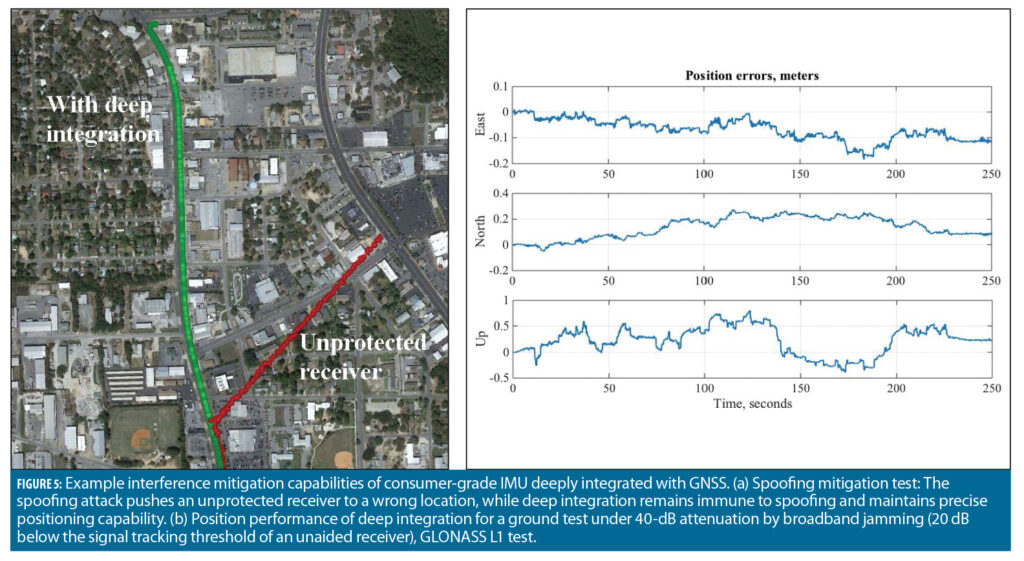
Figure 5(a) illustrates the spoofing mitigation capability. In this case, a smart spoofing was software-injected into pre-recorded baseband signal samples of GPS Link 1 C/A signal, which were then post-processed by QuNav’s software-defined receiver (SDR) deeply integrated with consumer-grade MEMS IMU (that was used for GNSS outages and dense urban tests discussed above).
The spoofer implemented a position push and was able to successfully hijack the signal-processing functionality of an unaided receiver. In contrast, the deeply integrated system maintained the lock on the authentic signal throughout the tests thus making the system immune to spoofing.
LCI also provides additional 20 dB protection against jamming, including the most difficult case of matched-spectrum (broadband) jamming. To illustrate, Figure 5(b) shows test results for a ground vehicle test scenario where a 40-dB signal attenuation was introduced by a software-injection of broadband jamming into GLONASS L1 signal data. This attenuation level is 20 dB below a tracking threshold of unaided receivers.
Sub-meter positioning capabilities were maintained using aiding from a MEMS IMU chipset. In addition to jamming suppression, extended signal accumulation is also beneficial for weak signal recovery. Specifically, the 20 dB anti-jam protection is equivalent to 20 dB gain in weak GNSS signal processing, which is directly beneficial for degraded environments such as dense urban and under multiple layers of canopy.
Conclusion
To summarize, consumer-grade MEMS inertial sensors provide substantial benefits for various GNSS-degraded environments. As illustrated with test results, tightly coupled GNSS/INS supports position continuity over relatively short GNSS outages (30-40 seconds). This outage duration can be increased (to 5 minutes or longer) if the system mechanization is augmented with other navigation aids (such as motion constraints for ground vehicles). In addition, tightly coupled solution enables reliable localization in contested GNSS environments such as urban canyons. Finally, extension of tight coupling to deep integration allows for mitigation of interference (jamming and spoofing).
In the next issue, we will look into fundamentals and discuss main principles of inertial navigation.




