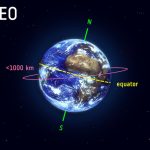
The European Space Agency (ESA) low Earth orbit (LEO)-PNT satellite program, approved at last year’s (2022) ESA ministerial conference, will soon begin testing a mini-constellation of at least ten satellites, placed in orbit some hundreds of kilometers above the Earth’s surface. Conventional GNSS systems, like those used by Europe’s Galileo program, utilize medium Earth orbit (MEO) satellites, about 23,000 kilometers from Earth.
A new software from RUAG Space for its GNSS receivers makes it possible to determine the position of a satellite in orbit ten times more accurately, down to 10 centimeters, according to the company. The more precise the satellite position, the more accurate its data, for example about climate and weather prediction. Better satellite navigation also helps to avoid space debris and will be important in the upcoming deployment of hundreds, perhaps thousands of small low-Earth orbit satellites.
RUAG Space recently conducted its first software tests on Earth. This involved testing a new software with an existing navigation receiver for satellites under simulated space conditions. “The result was impressive,” said Anders Linder, Senior Vice President Program Satellites at RUAG Space. “We were able to determine the satellite’s real-time position ten times more accurately than previously possible.” Position accuracy improved from about 100 centimeters to 10 centimeters. “This is a quantum leap in high-precision satellite positioning.”
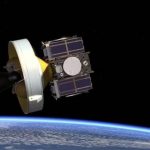
[Image above: Copernicus: Sentinel-1 — The SAR Imaging Constellation for Land and Ocean Services. Courtesy European Space Agency.]
The higher accuracy was achieved with a new software program. To determine the exact position of satellites in orbit, RUAG Space’s latest navigation receivers use Galileo and GPS signals. “There is currently untapped potential in the Galileo satellites,” explained Anders Linder. Galileo satellites transmit several signals. On one of these signals, a new service, the High Accuracy Service (HAS), will enable significantly improved positioning. This service will be available in 2022.
“A software update can be played on navigation receivers already in space as well as receivers we have already delivered to customers and which are still on Earth,” said Linder. The hardware of the devices remains unchanged. RUAG Space for example already delivered the GNSS receiver PODRIX for ESA’s Sentinel-1C environmental satellite. The European Space Agency (ESA) is having its satellite upgraded with this new software for in-orbit validation of the satellite. The Sentinel-1C satellite is scheduled for launch in 2022.
The following comes from a paper by Heinz Reichinger at RUAG Space. A full technical article will appear in an upcoming issue of Inside GNSS.
“High-accuracy positioning of satellites in orbit has seen a lot of improvement in the recent years. Centimeter-level accuracy is still the domain of Precise Orbit Determination (POD), which is a post-processing algorithm with time delays between several hours and several days, depending on the required accuracy level. Precise Point Positioning (PPP) techniques allow to come close to POD accuracies with expected accuracies in the range of 10 cm but have the big advantage of being available in real-time. Thus, the real-time accuracy increases from currently 1 meter to as precise as 10 cm, resulting in a 10x times more precise real-time determination of the satellite’s position in orbit.
“PPP in space relies on highly accurate GNSS satellite (clock and orbit) correction data, which needs to be available in real-time and with global coverage. Such a real-time and global correction data service for the Galileo and GPS constellations provided by Galileo as part of its High Accuracy Service (HAS) on the E6 signal has already been tested and is planned to become operational in 2022.
“RUAG Space is developing PPP software utilizing the Galileo HAS for its “PODRIX” GNSS receivers for Low Earth Orbit applications. ESA has awarded a contract to RUAG Space to deliver this PPP software for upgrading the PODRIX GNSS receiver already delivered to Thales Alenia Space for integration on the Sentinel 1C satellite. The PPP performance of the receiver will be demonstrated during the in-orbit validation phase of Sentinel 1C, which is set for launch in 2022. Further developments/improvement of the PODRIX GNSS receiver are expected to be endorsed with the completion of the project NEWSPAPER receiving funding from the European Union Agency for the Space Programme (EUSPA) supporting the evolution of the PPP software.
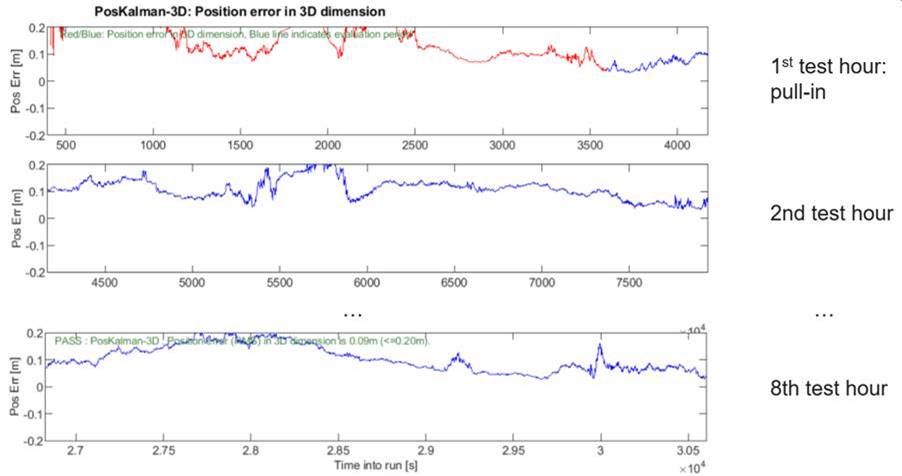
“The figure below shows PPP performance test results of the PODRIX GNSS receiver. The tests have been performed with a satellite signal simulator and flight-representative hardware. Based on RUAG Space’s experience with highly accurate GNSS receivers for space applications, this performance is expected to be actually reached in orbit.”
PPP performance test results of the PODRIX GNSS receiver. Courtesy RUAG Space
New Nav for Satellite Swarms
In the coming years, the launch of many satellite swarms of hundreds to thousands of small satellites in low-Earth orbit is planned. For such swarms of identical satellites, RUAG Space is developing a low-cost navigation receiver that is lighter and smaller than conventional GNSS receivers and already includes the new software with processing of the Galileo signal HAS as standard. The new space-borne receiver called NavRix PinPoint is more cost-effective due to the use of standardized electronic components.
NavRIX Pinpoint, courtesy RUAG Space.
At the beginning of 2021, the Prague-based European Union Space Programme Agency awarded a research contract to RUAG Space. The aim of the study is to increase the positioning accuracy of satellites. The study will be completed in 2022.
Fugro’s SpaceStar GNSS Precise Point Positioning (PPP) service provides high-accuracy positioning in space. Highly accurate positioning in LEO is becoming increasingly important for Earth observation applications, safe constellations management, and space debris collision avoidance.
A low-cost, commercial off-the-shelf (COTS)-based, Precise Point Positioning (PPP), multi-constellation, multi-frequency GNSS receiver for micro and small satellites allows ≤10 cm positioning accuracy on a low-Earth orbit.
NASA’s Deep Space Atomic Clock is working toward giving far-flung space explorers more autonomy when navigating. In a new paper published in the journal Nature, the mission reports progress in their work to improve the ability of space-based atomic clocks to measure time consistently over long periods.
The European GNSS Agency (GSA) awarded a 1 million-euro research contract to RUAG Space for a study to increase the accuracy of space data provided by climate and environmental satellites.
Spirent Communications has added premium enhancements to its GSS9000 Series GNSS simulator, doubling the update rate to run simulations at a software and hardware update rate of up to 2 kHz, improving accuracy of the simulated trajectory without compromising performance.
The European Union’s Enhanced Navigation in Space (ENSPACE project), coordinated by Qascom, announced significant progress in the development of a software GNSS solution that supports Galileo and is especially aimed at the rapidly growing small satellite market sector.
Here, in no particular order save vaguely chronological, are the editor’s picks for Top Twelve GNSS and PNT Tech Stories of 2020: those that heralded technical breakthroughs significant for their time, that will continue to roll out wide-reaching developmental advances in 2021 and beyond.
Spirent Federal Systems announced that it has been selected by the U.S. National Aeronautics and Space Administration (NASA) for testing GNSS for lunar exploration.
Low-noise MEMS inertial sensor and systems technology coupled with VELOX high-speed processing are integrated with a 72-channel GNSS receiver from Gladiator Technologies. The devices deliver position accuracy within 2 nautical miles per hour during GPS outages.
A revolutionary accelerometer makes possible new levels of stability and control in UAV navigation, at lower cost for the inertial measurement unit package. A free webinar on July 8 focuses on this class of high-performance accelerometers and the expanding autonomous applications they are opening up.
The MEMS-based inertial measurement unit (IMU) represents the single biggest positioning and navigation advance of the last 20 years. That assertion is made during the first of three panels in the webinar “Inertial Technology for Robotics, UAVs and other Applications,” freely available on May 6. The 1.5 hour presentation examines how this breakthrough plays in the fields of autonomy, high dynamics and challenging environments, including on the frontiers of space.
Three experts takes a close-up look at contemporary and emerging inertial sensor technologies and applications, from the laboratory to the factory to the field. Register here to attend. The webinar is sponsored by Sensonor.
MEMS (micro-electromechanical sensors) make possible a miniaturization of size, weight, power requirements and cost never thought achievable before. When MEMS inertial navigation pairs with GPS for navigation, the key factor is the error budget of each sensor and how that plays into the accuracy of the solution. Attendees will learn how the new inertial sensors’ reduced error budgets translate into higher system performance.
The presentation begins with the current state of the inertial art, delivered by a recognized expert. The second speaker describes a high-accuracy tactical-grade inertial measurement unit (IMU) with increased accelerometer performance to support demanding guidance and navigation applications.
This knowledge is taken to the field to examine the IMU’s role in successful satellite launch missions during the third panel. The attitude determination and control system (ADCS) rises to the challenge of an extremely demanding environments and set of requirements. A satellite moving at a speed of 7,500 meters/second over ground requires precise maneuvering, stabilization and point in order to obtain imagery at 1-meter resolution.
Questions from the audience are actively encouraged and will be addressed by the three speakers in the final portion of the webinar.
Webinar speakers:
Ralph Hopkins, Draper Lab
Ralph Hopkins is a Distinguished Member of the Technical Staff and Group Leader in the Positioning Navigation and Timing (PNT) Division at Draper, a leading research & development organization. He is responsible for the design and development of inertial instruments and sensors. Ralph has served as Technical Director of advanced inertial instrument development programs including strategic, navigation and tactical grade gyroscopes and accelerometers. He holds an ME in Engineering Mechanics from Columbia University, and an MS in Engineering Management from The Gordon Institute of Tufts University.
Reidar Holm, Sensonor
Reidar Holm is a Product Development Manager at Sensonor, a producer and developer of high-precision, light-weight gyros and IMUs. He works MEMS R&D and design, ASIC design, low-stress package design, system design, assembly and calibration, and high-volume production for automotive, MEMS pressure sensors, accelerometers, gyros and IMUs. He has a Degree in Electrical Engineering and Electronics from University of Manchester Institute for Science and Technology (UK) in 1982.
Ryan Robinson, LeoStella
Ryan Robinson is the Lead Guidance, Navigation and Control Engineer at LeoStella, a small satellite design and manufacturing company, He is responsible for the design, development, test, and delivery of ADCS subsystems on LeoStella satellites. He received a Ph.D. in Aerospace Engineering from the University of Maryland, College Park. Technical areas of interest include attitude determination and control systems design, sensing and actuation, nonlinear dynamics, and autonomy.
Register here for the free webinar, “Inertial Technology for Robotics, UAVs and other Applications.” The webinar will also be available for subsequent download, for those registrants unable to attend at the appointed time.