A revolutionary accelerometer makes possible new levels of stability and control in UAV navigation, at lower cost for the inertial measurement unit package. A free webinar on July 8 focuses on this class of high-performance accelerometers and the expanding autonomous applications they are opening up.
Advances in silicon-microelectro-mechanical systems (Si-MEMS) are predicted to unleash dramatic market growth over the next five years, and UAVs are among the key sectors that will benefit.
This user-friendly solution combines compactness with high-level performance, opening up a whole new portfolio of accelerometer applications. The webinar speakers take us inside the manufacturing process to see just how this is accomplished: with a high-sensitivity vibrating beam principle, common mode error rejection and custom damping to improve performance under vibration.
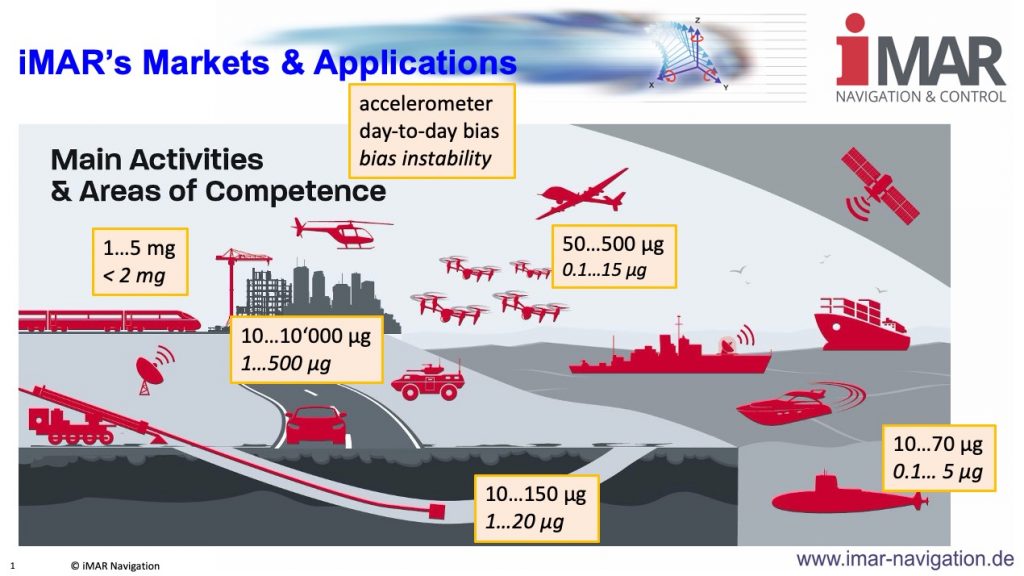
Smart integration of the MEMS accelerometer forms into inertial measurement units providing precise navigation with very low acceleration offset and sensor bias for good long-term stability. High bandwidth and low data latency complete the picture.
Register now for this exciting look into new autonomous capabilities.
The expert panel:

Dimitrios Damianos, Technology and Market Analyst – Imaging & MEMS, Yole Développement
Dimitrios Damianos, PhD joined Yole Développement (Yole) as a Technology and Market Analyst in the Photonics & Sensing division. Dimitrios is daily working with his team to deliver valuable technology & market reports as well as custom consulting projects regarding the imaging and sensor industry including photonics & MEMS. He holds a BSc in Physics and a MSc degree in Photonics from the University of Patras (Greece). After his research on theoretical and experimental quantum optics and laser light generation, Dimitrios completed his Ph.D. at Grenoble’s university (France) in optics and microelectronics. He has also authored and co-authored several scientific papers in international peer-reviewed journals.

Vivien Lagorce, MEMS Program Manager, Thales
Vivien Lagorce, MEMS sensor project leader, graduated in Electrical Engineering from Grenoble’s Institute (France). He joined THALES Group in 2009. At THALES, Vivien has carried out the development of several power supply electronic products embedded in airborne applications like flight controllers, GNSS receivers and inertial navigation systems. He has been in charge of their airworthiness certification process regarding European (EASA) and US (FAA) regulations. Now, Vivien is the project leader of the new high grade accelerometer and gyrometer based on Silicon Micro Electro Mechanical System (Si-MEMS) combining compactness with high-level performance.

Olivier Lefort, MEMS Expert and Product Design Authority, Thales
At THALES, Olivier LEFORT is MEMS sensor design authority. Since 1990, he has lead the development of MEMS technologies and then several MEMS sensors for Navigation, from AirData pressure sensors to inertial grade vibrating accelerometers and gyrometer. He has filled more than 20 patents in these fields and also author of several papers presented in Inertial oriented conferences. He is now focused on the market introduction of a MEMS accelerometer affording an outstanding sWAP level.

Edgar v. Hinüber, CEO and Managing Director, iMAR Navigation GmbH
Edgar Hinüber, Dr.-Ing. Edgar v. Hinüber is CEO and Managing Director, iMAR Navigation GmbH in Germany. He graduated from the University of Hannover in Electrical Engineering, Control and Information Theory with a Diploma in 1989 in the field of machine vision and a PhD in 1993 in Surveying of industrial robots with inertial sensors. Founded iMAR Navigation in 1992 in St. Ingbert. He has more than 30 years of experience in inertial solutions and technologies in defense, industrial and surveying applications.




