Global Navigation Satellite Systems Engineering, Policy, and Design
Global Navigation Satellite Systems Engineering, Policy, and Design

 Ismael Colomina, wife Carmina, and children Jan and Eulalia on vacation in Brazil
Ismael Colomina, wife Carmina, and children Jan and Eulalia on vacation in BrazilI Fell In Love With GNSS When . . .
“Two GNSS-related experiences really impressed me as a young professional and that I’ve never forgotten. The first involved adjusting a GPS-supported (GPS aerial control) aerial triangulation. By getting rid of most ground control points we managed to produce new results.
By Inside GNSS
First I thought to title these comments, “Learn from the People,” but readers might have confused me with Chairman Mao. (I spent some time recently around the Yangtze River, although I didn’t take the opportunity to swim in it as the Great Helmsman did.)
In any case, my thoughts turned toward the masses and the mass market as a result of working with the authors of an article in this issue on cooperative authentication. They have extended a chain of innovative proposals drawing on the crowdsourcing concept of data sharing among nearby GNSS users or “peers.”
By Inside GNSS
Significant progress has been made in integrating two classes of small, unmanned aircraft into the national air space (NAS), an area of considerable interest for GNSS companies whose products provide navigation and guidance for many of the unmanned systems.
By Dee Ann Divis
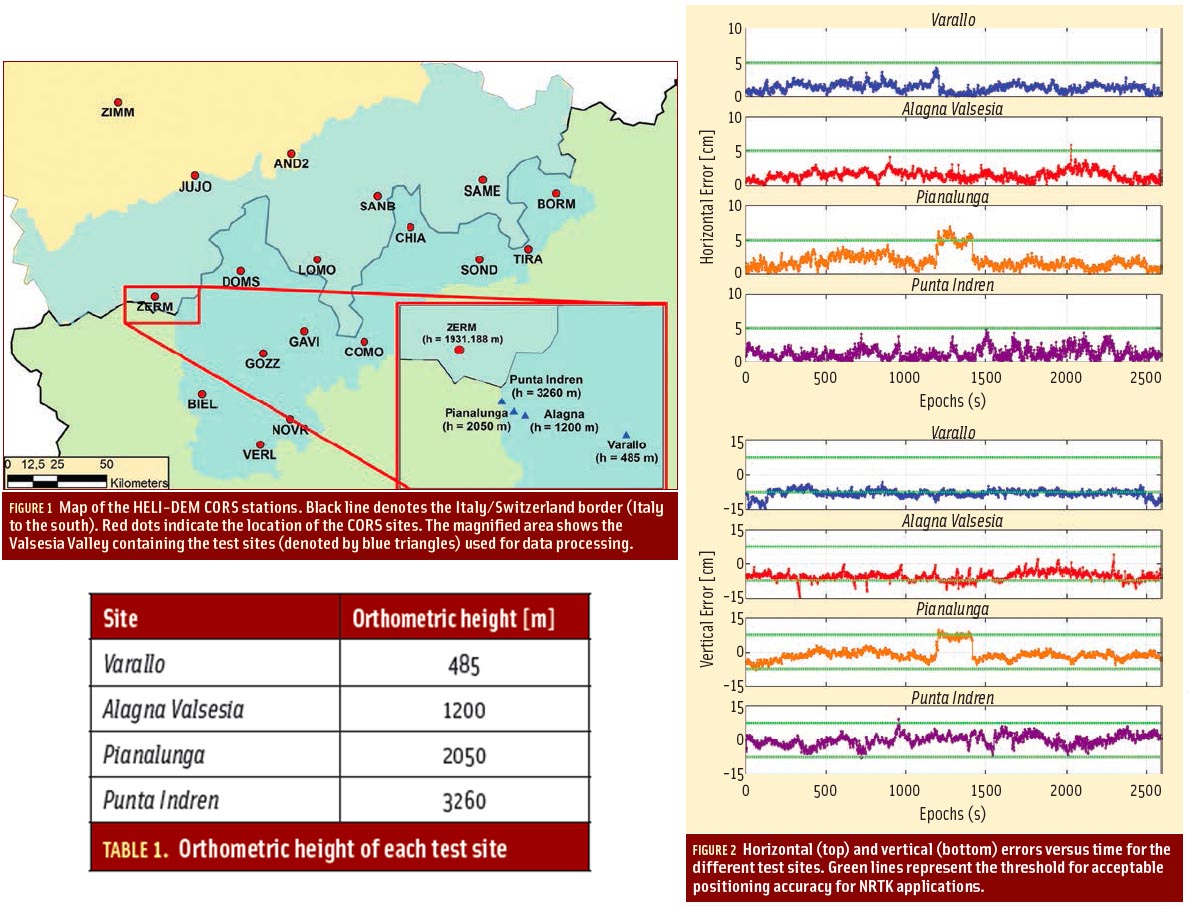
Q: What is the effect of user and CORS height on NRTK performance?

Working Papers explore the technical and scientific themes that underpin GNSS programs and applications. This regular column is coordinated by Prof. Dr.-Ing. Günter Hein, head of Europe’s Galileo Operations and Evolution.
By Inside GNSS Ismael Colomina
Ismael ColominaSIDEBAR: Ismael Colomina’s Compass Points
Ismael Colomina began his career in 1982. “So, in a way,” he says, “I grew up as a professional at the same time GPS was growing up and maturing. GNSS has always been present in my working life; so, I never experienced the ‘GNSS, aha!’ moment. Rather, I never stopped thinking ‘GNSS, of course!’"
By Inside GNSS
Return to main article: “Integrity for Aviation”
By Inside GNSS
Return to main article: “Integrity for Aviation”
By Inside GNSS
In a part of the world where frustrated drivers will park anywhere, including squarely on a sidewalk, a local newspaper is using location data to shame car owners into shaping up.
The Village, a Russian online publication serving Moscow, St. Petersburg and Kiev; created a free app that notes a badly parked vehicle’s make, color, and license plate information when users snap its picture.
By Dee Ann Divis
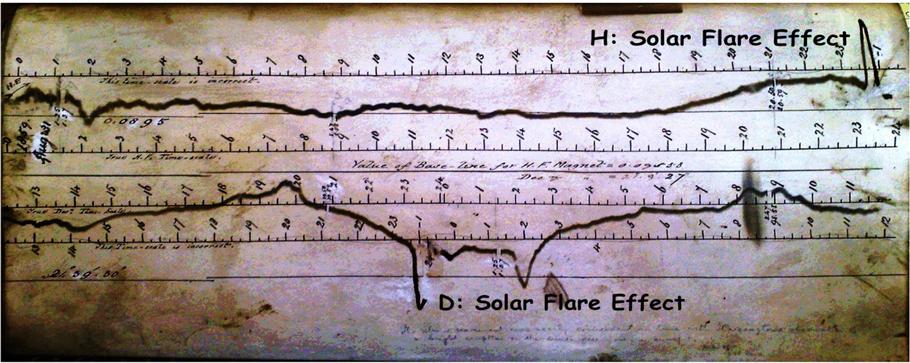 One of 12 magnetograms recorded at Greenwich Observatory during the Great Geomagnetic Storm of 1859
One of 12 magnetograms recorded at Greenwich Observatory during the Great Geomagnetic Storm of 1859 1996 soccer game in the Midwest, (Rick Dikeman image)
1996 soccer game in the Midwest, (Rick Dikeman image)
 Nouméa ground station after the flood
Nouméa ground station after the flood A pencil and a coffee cup show the size of NASA’s teeny tiny PhoneSat
A pencil and a coffee cup show the size of NASA’s teeny tiny PhoneSat Bonus Hotspot: Naro Tartaruga AUV
Bonus Hotspot: Naro Tartaruga AUV
 Pacific lamprey spawning (photo by Jeremy Monroe, Fresh Waters Illustrated)
Pacific lamprey spawning (photo by Jeremy Monroe, Fresh Waters Illustrated) “Return of the Bucentaurn to the Molo on Ascension Day”, by (Giovanni Antonio Canal) Canaletto
“Return of the Bucentaurn to the Molo on Ascension Day”, by (Giovanni Antonio Canal) Canaletto The U.S. Naval Observatory Alternate Master Clock at 2nd Space Operations Squadron, Schriever AFB in Colorado. This photo was taken in January, 2006 during the addition of a leap second. The USNO master clocks control GPS timing. They are accurate to within one second every 20 million years (Satellites are so picky! Humans, on the other hand, just want to know if we’re too late for lunch) USAF photo by A1C Jason Ridder.
The U.S. Naval Observatory Alternate Master Clock at 2nd Space Operations Squadron, Schriever AFB in Colorado. This photo was taken in January, 2006 during the addition of a leap second. The USNO master clocks control GPS timing. They are accurate to within one second every 20 million years (Satellites are so picky! Humans, on the other hand, just want to know if we’re too late for lunch) USAF photo by A1C Jason Ridder.  Detail of Compass/ BeiDou2 system diagram
Detail of Compass/ BeiDou2 system diagram Hotspot 6: Beluga A300 600ST
Hotspot 6: Beluga A300 600ST
1. ASHES & AIRPLANES
Boulder, Colorado USA
