It’s Time for 3D Mapping–Aided GNSS
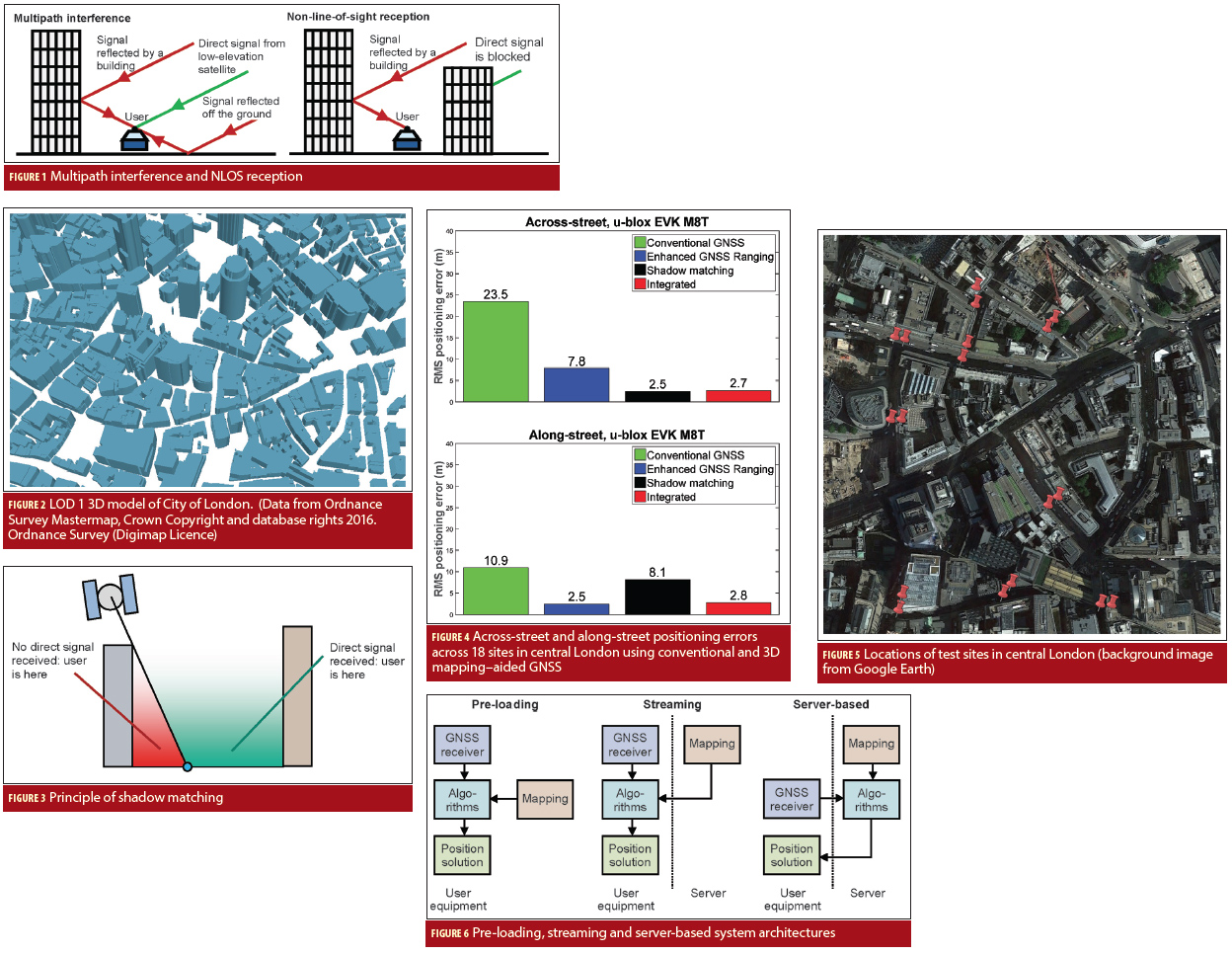
Figures 1-6Real-time position accuracy, achievable in dense urban areas using low-cost equipment, is currently limited to tens of meters. If this could be improved to five meters or better, a host of potential applications would benefit. These include situation awareness of emergency, security and military personnel and vehicles; emergency caller location, mobile mapping, tracking vulnerable people and valuable assets, intelligent mobility, location-based services and charging, augmented reality; and enforcement of curfews, restraining orders and other court orders.
By Inside GNSS