January 19, 2015
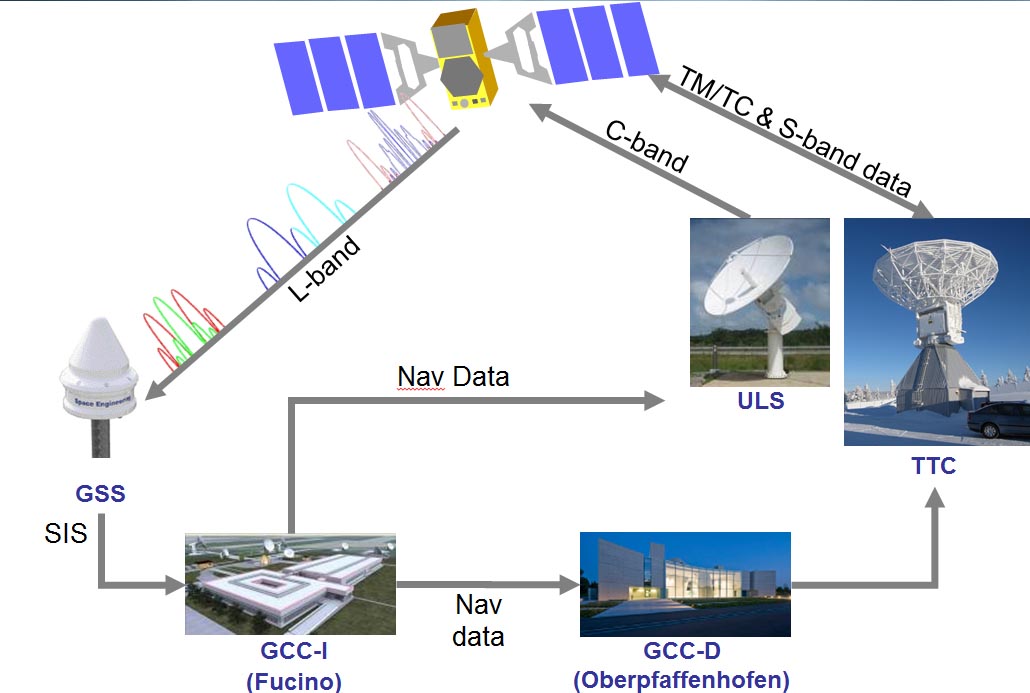 Galileo Sensor Stations (GSSs) pick up Galileo signals in space (SIS) to perform clock synchronisation and orbit measurements which are fed back to the twin Galileo Control Centres to serve as the basis of the navigation message incorporating clock and position corrections and associated integrity data. Uplink Stations (ULSs) then uplink this navigation message to the Galileo satellite navigation payloads for rebroadcast to users. Telemetry, Tracking and Command Stations (TT&Cs) provide the link between the Control Centres and the satellite platforms. ESA figure
Galileo Sensor Stations (GSSs) pick up Galileo signals in space (SIS) to perform clock synchronisation and orbit measurements which are fed back to the twin Galileo Control Centres to serve as the basis of the navigation message incorporating clock and position corrections and associated integrity data. Uplink Stations (ULSs) then uplink this navigation message to the Galileo satellite navigation payloads for rebroadcast to users. Telemetry, Tracking and Command Stations (TT&Cs) provide the link between the Control Centres and the satellite platforms. ESA figure
Galileo’s operation controllers will temporarily stop updating satellite orbital positions in the system’s navigation messages beginning near the end of this month in order to help implement upgrades in the ground mission segment, the European Space Agency (ESA) announced today (January 19, 2015).
Although the Galileo satellites will continue to transmit navigation signals, the generation and uplink of updated navigation messages will be interrupted during the last week of January for about five weeks.
Read More >
By Inside GNSS