Global Navigation Satellite Systems Engineering, Policy, and Design
Global Navigation Satellite Systems Engineering, Policy, and Design
 The Waldspirale in Darmstadt
The Waldspirale in DarmstadtThe 2015 CERGAL conference will be held in Darmstadt, Germany on July 7 and 8, 2015.
Qualification and certification of mission and safety critical applications are major milestones in the successful operational rollout of Satellite Navigation systems like GPS/EGNOS, Galileo, GLONASS and Beidou. This symposium will concentrate on measures already established and future activities that will assure SATNAV systems certification and operational safety.
This year’s main topics include:
By Inside GNSS
The Institute of Navigation’s 2015 International Technical Meeting will take place January 26-28 at the Laguna Cliffs Marriott Hotel in Dana Point California.
Online registration is available. Discounted Registration and hotel reservations end January 5.
By Inside GNSS
The day is coming when automated vehicles will be a common sight on our roadways, and the Florida Department of Transportation (FDOT) intends to be prepared for their integration into daily traffic operations when that day arrives.
By Inside GNSS
On Wednesday (December 17, 2014) Raytheon Company announced successful completion of the fourth of five planned launch and early orbit exercises being undertaken together with Lockheed Martin to demonstrate new automation capabilities, information assurance, and launch readiness of the U.S. Air Force’s next generation GPS III satellite and Operational Control System (OCX).
By Inside GNSS
With final passage of the Omnibus spending bill on December 13 Congress deepened by $17 million the fiscal ditch in which the new GPS ground system finds itself, possibly further delaying the completion of a modernized operational control segment (OCX) and increasing costs just as the Department of Defense’s top acquisition official steps in to take a closer look at budget overruns.
By Inside GNSS
The GPS Reflections Group at the University of Colorado, Boulder, led by Dr. Kristine M. Larson, has received the Creativity Prize from the Council for the Prince Sultan Bin Abdulaziz International Prize for Water.
The council awarded the prize today (December 15, 2014) at a ceremony preceding the 6th International Conference on Water Resources and Arid Environments (ICWRAE 6) taking place this week in Riyadh, Saudi Arabia.
By Inside GNSS

The 9th annual conference on the Croatian Adriatic aims at GNSS experts and focuses on GNSS resilience and GNSS applications development. It will take place at Baška on the resort island of Krk in Croatia from May 10 – 12, 2015.
The deadline for abstracts is January 20, 2015.
Registration information can be found on the RIN website.
Topics include:
By Inside GNSS GLONASS-K1 at ISS-Reshetnev
GLONASS-K1 at ISS-ReshetnevRussia launched the second and final GLONASS-K1 flight-test satellite on Sunday (November 30, 2014) from the Plesetsk cosmodrome on board a Soyuz 2-1B rocket.
Built by ISS-Reshetnev, the satellite broadcasts five navigation signals in three frequency bands – L1, L2 and L3. A civil CDMA signal is among those to be transmitted in the L3 band. The spacecraft also carries new equipment to support the international search and rescue system COSPAS-SARSAT: a payload that can relay signals from users in distress.
By Inside GNSS

Everyone talks about GNSS precision and accuracy, but how do we get it?
On Monday, December 15, three experts in the field discussed the leading high-accuracy GNSS techniques of real-time kinematic (RTK) and precise point positioning at a free, 90-minute webinar. You may still register to view the recorded version.
REGISTER HERE for view-on-demand version
Webinar Presentation Slides
By Inside GNSS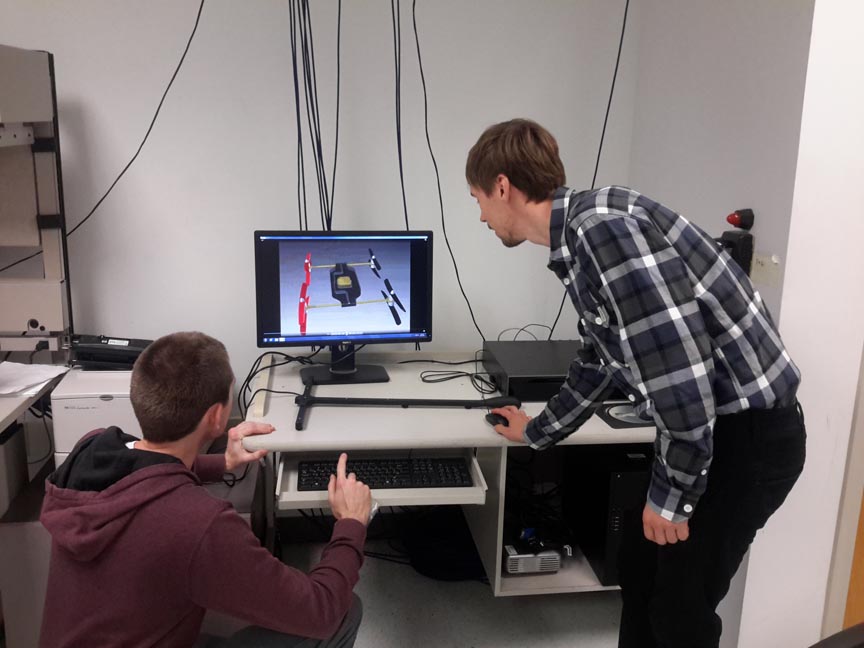 UT-Corpus Christi students Ian Gates (left) and Christoph Hintz review the characteristics of the 3-dimensional computer-aided design prototype. The experimental prototype should look and work like the 3D model.
UT-Corpus Christi students Ian Gates (left) and Christoph Hintz review the characteristics of the 3-dimensional computer-aided design prototype. The experimental prototype should look and work like the 3D model. Imagine an unmanned multi-copter that doesn’t just fly horizontally, but that has the capability to fly vertically as well.
This UAV would have the ability to transition from the horizontal orientation most rotor drones fly in, and rotate its body to a vertical orientation, offering access to tight and irregular spaces conventional drones just can’t reach—a capability that could drastically improve search and rescue efforts in collapsed buildings.
By Inside GNSS Image captured by an onboard Infra-red camera during the West Virginia demonstration
Image captured by an onboard Infra-red camera during the West Virginia demonstrationLarge wildfires can create their own weather and a dynamic, uncertain environment, and that is one of the reasons they’re so dangerous, says Manish Kumar, an Associate Professor in the Department of Mechanical, Industrial, and Manufacturing Engineering at the University of Toledo.
By Inside GNSSThe number of special requests to fly unmanned aircraft commercially has surpassed 130 as firms search for a way around a federal ban on for-pay flights. The new numbers came to light the same day a court decision underscored regulators’ authority to rein in the industry with restrictions unlikely to be lifted until new rules are put in place years from now.
By Inside GNSS