February 28, 2018
VectorNav GNSS-Aided INS Technology Helping Red Bull Air Race
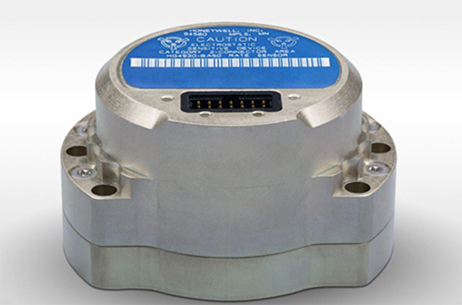
VectorNav Technologies is playing key role for Red Bull Air Race, which has selected the VectorNav VN-300 Dual Antenna GNSS-Aided Inertial Navigation System as the primary source of aircraft telemetry data for the Master Class raceplanes participating in the Red Bull Air Race World Championship.
By Inside GNSS