May 20, 2015
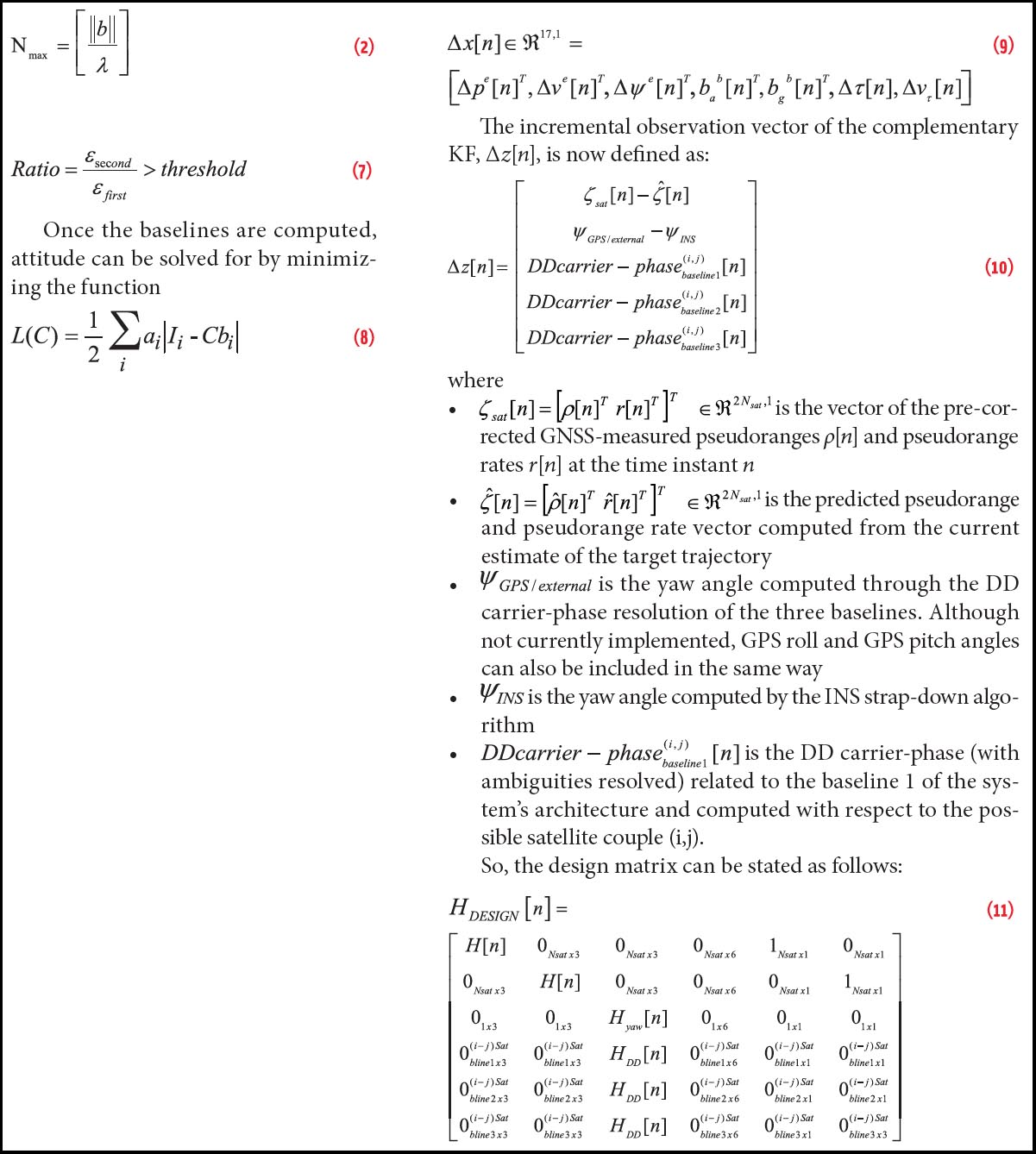 Equations 2, 7, 8, 9, 10 & 11
Equations 2, 7, 8, 9, 10 & 11
Thinking Small
Equations 2, 7, 8, 9, 10 & 11Unmanned aerial vehicles (UAV) are finding increased application in both domestic and governmental applications. Small UAVs (maximum take off weight less than 20 kilograms) comprise the category of the smallest and lightest platforms that also fly at lower altitudes (under less than 150 meters).
Designs for this class of device have focused on creating UAVs that can operate in urban canyons or even inside buildings, fly along hallways, and carry listening and recording devices, transmitters, or miniature TV cameras.
By Inside GNSS