May 18, 2014
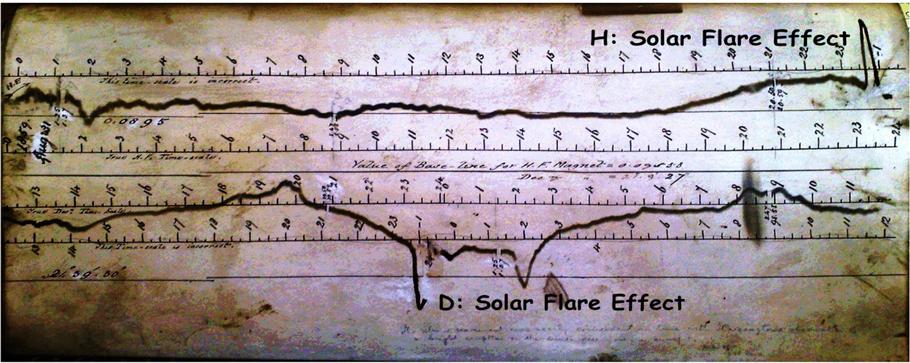 One of 12 magnetograms recorded at Greenwich Observatory during the Great Geomagnetic Storm of 1859
One of 12 magnetograms recorded at Greenwich Observatory during the Great Geomagnetic Storm of 1859
 1996 soccer game in the Midwest, (Rick Dikeman image)
1996 soccer game in the Midwest, (Rick Dikeman image)

 Nouméa ground station after the flood
Nouméa ground station after the flood
 A pencil and a coffee cup show the size of NASA’s teeny tiny PhoneSat
A pencil and a coffee cup show the size of NASA’s teeny tiny PhoneSat
 Bonus Hotspot: Naro Tartaruga AUV
Bonus Hotspot: Naro Tartaruga AUV

 Pacific lamprey spawning (photo by Jeremy Monroe, Fresh Waters Illustrated)
Pacific lamprey spawning (photo by Jeremy Monroe, Fresh Waters Illustrated)
 “Return of the Bucentaurn to the Molo on Ascension Day”, by (Giovanni Antonio Canal) Canaletto
“Return of the Bucentaurn to the Molo on Ascension Day”, by (Giovanni Antonio Canal) Canaletto
 The U.S. Naval Observatory Alternate Master Clock at 2nd Space Operations Squadron, Schriever AFB in Colorado. This photo was taken in January, 2006 during the addition of a leap second. The USNO master clocks control GPS timing. They are accurate to within one second every 20 million years (Satellites are so picky! Humans, on the other hand, just want to know if we’re too late for lunch) USAF photo by A1C Jason Ridder.
The U.S. Naval Observatory Alternate Master Clock at 2nd Space Operations Squadron, Schriever AFB in Colorado. This photo was taken in January, 2006 during the addition of a leap second. The USNO master clocks control GPS timing. They are accurate to within one second every 20 million years (Satellites are so picky! Humans, on the other hand, just want to know if we’re too late for lunch) USAF photo by A1C Jason Ridder.
 Detail of Compass/ BeiDou2 system diagram
Detail of Compass/ BeiDou2 system diagram
 Hotspot 6: Beluga A300 600ST
Hotspot 6: Beluga A300 600ST

GNSS Hotspots | May 2014
One of 12 magnetograms recorded at Greenwich Observatory during the Great Geomagnetic Storm of 18591996 soccer game in the Midwest, (Rick Dikeman image)Nouméa ground station after the floodA pencil and a coffee cup show the size of NASA’s teeny tiny PhoneSatBonus Hotspot: Naro Tartaruga AUVPacific lamprey spawning (photo by Jeremy Monroe, Fresh Waters Illustrated)“Return of the Bucentaurn to the Molo on Ascension Day”, by (Giovanni Antonio Canal) CanalettoThe U.S. Naval Observatory Alternate Master Clock at 2nd Space Operations Squadron, Schriever AFB in Colorado. This photo was taken in January, 2006 during the addition of a leap second. The USNO master clocks control GPS timing. They are accurate to within one second every 20 million years (Satellites are so picky! Humans, on the other hand, just want to know if we’re too late for lunch) USAF photo by A1C Jason Ridder. Detail of Compass/ BeiDou2 system diagramHotspot 6: Beluga A300 600STJPL uses GPS to find Sierra Nevada water weight; Near collision of drone and regional jet prompts questions, West Antarctic ice sheet melt at “point of no return,” First Galileo FOC satellites at launch site, China’s GBAS tested in Tianjin
By Inside GNSS