Global Navigation Satellite Systems Engineering, Policy, and Design
Global Navigation Satellite Systems Engineering, Policy, and Design
Mark Petovello is a professor in the Department of Geomatics Engineering at the University of Calgary in Alberta, Canada. Read More
He is a contributing editor to Inside GNSS who coordinates the column, “GNSS Solutions.”
He has been actively involved in many aspects of positioning and navigation since 1997, including GNSS algorithm development, inertial navigation, sensor integration, and software development.
From 2003 to 2005, Dr. Petovello led the University of Calgary’s Joint Precision Approach and Landing System (JPALS) research that included a seminal assessment of the amount of flexure experienced upon an aircraft carrier at sea using GPS and inertial sensors, and he led the development of a novel algorithm for assessing the probability of correct ambiguity resolution for geometry- based positioning strategies.
He supervised the execution of a research contract with a major automobile manufacturer in which low-cost, onboard sensors are used for centimeter-level positioning. Part of this work resulted in a patent filing in 2006.
Since 2005, Dr. Petovello led the group’s software-based receiver development effort with a focus on carrier phase tracking under degraded signal environments. As part of this, Dr. Petovello developed a new algorithm to improve the processing efficiency of software-based receivers by 25 percent. He filed a patent on this algorithm in 2006.
In 2006, he received the U.S. Institute of Navigation Early Achievement Award, given to individuals who have made outstanding achievements earlyin their career in the art and science of navigation.
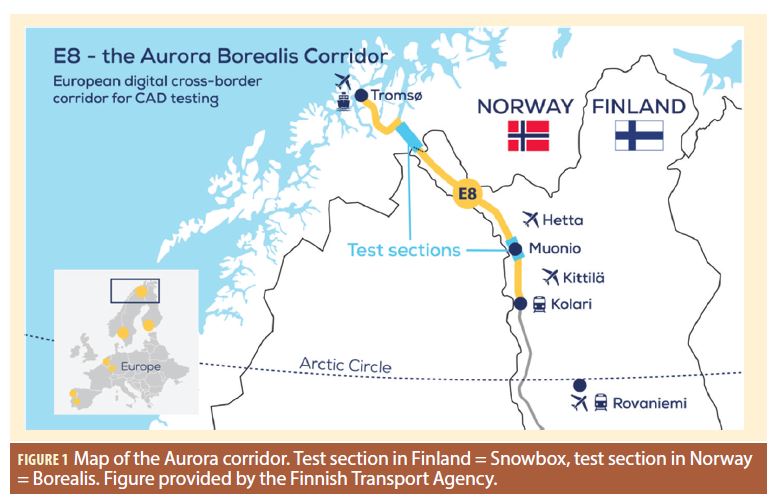
There are a number of challenges to localization of autonomous vehicles (AVs) and autonomous driving (AD) applications in northern latitudes. The primary…
By Mark Petovello
Snapshot positioning is a technique for determining the position of a Global Navigation Satellite System (GNSS) receiver using only a very brief interval…
By Mark Petovello

Rightfully, the GNSS community almost universally considers reflected signals to be problematic (the field GNSS reflectometry being an obvious exception). Reflected or non-line-of-sight…
By Mark Petovello

GNSS technology plays an important role in an ever expanding range of safety, security, business and policy critical applications.
By Mark Petovello
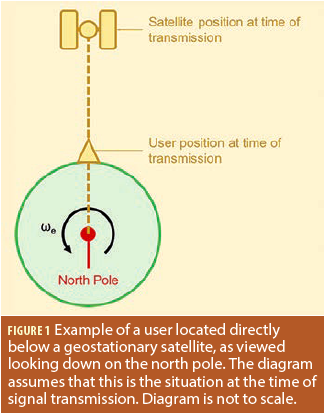
GNSS positioning is premised on the idea that the satellite positions are known, or can be calculated. Errors in the computed satellite position…
By Mark Petovello
Figures 1 – 10 Q: Do modern multi-frequency civil receivers eliminate the ionospheric effect?
By Mark Petovello

