There are a number of challenges to localization of autonomous vehicles (AVs) and autonomous driving (AD) applications in northern latitudes. The primary challenge is the harsh winter weather, which limits the utility of imaging sensors — snow, fog, mist, and darkness adversely affect such sensors and extreme low temperature can affect sensor performance. Ice and snow on the roads magnifies slippage of wheels, reducing the accuracy of wheel-mounted sensors.
From a GNSS perspective, GNSS and satellite-based augmentation system (SBAS) satellite visibility is limited and the more active ionosphere hampers high-accuracy GNSS positioning. GNSS interference monitoring networks in the Arctic region are also minimal meaning positioning systems are vulnerable in the absence of alternate solutions to improve robustness.
In terms of infrastructure, the broadband cellular network connectivity — necessary to download assistance data for GNSS, map updates, and traffic information — has spatial gaps in uninhabited areas of the European Arctic, such as northern Norway, Finland and Sweden. Lack of high quality and detailed maps limits the usefulness of absolute LiDAR- and camera-based positioning methods. Also, transport infrastructure in sparsely populated areas is not regularly updated and hence limit the potential market opportunity.
This article describes how a European Space Agency-supported research project called the Arctic-PNT Innovation Platform is investigating navigation accuracy and availability of signal and correction data using a specially equipped road segment in northern Finland and Norway.
The Aurora Borealis Intelligent Corridor
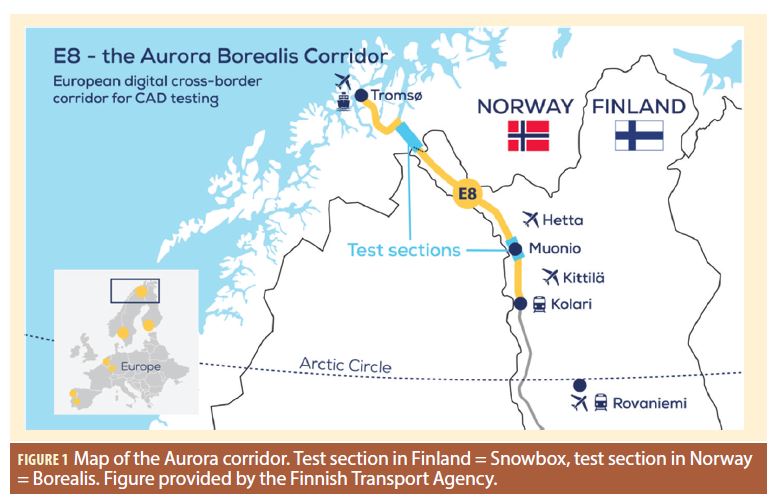
To address the many challenges described above, the Aurora Borealis Intelligent Corridor (“Aurora”) along the E8 highway was created to validate autonomous vehicle platforms under Arctic conditions. It consists of the Snowbox intelligent road inside Finland and the Borealis intelligent road inside Norway. Diverse infrastructure is deployed and otherwise available along these intelligent roads in order to provide precise absolute positioning capability to AVs. As part of this activity, a team of researchers from the Finnish Geospatial Research Institute (FGI) recorded relevant positioning data in March 2018 using an experimental autonomous vehicle called Martti developed by the RobotCar Crew of the VTT Technical Research Centre of Finland Ltd. Below presents the first results achieved from this campaign.
As shown in Figure 1, the 10 km-long Snowbox test road section is located in Muonio in western (Finnish) Lapland, and the 35 km-long Norwegian Borealis test section is located between Skibotn and the Finnish border at Kilpisjärvi. Special instrumentation is installed along and underneath the Snowbox test road for sensing road conditions and the category of passing vehicles. Moreover, there are entities in the area providing high quality communication networks (e.g. LTE and pre-5G test-network) and precise positioning services for all major GNSS constellations. EGNOS is also available even though satellites are only visible below about 10° elevation.
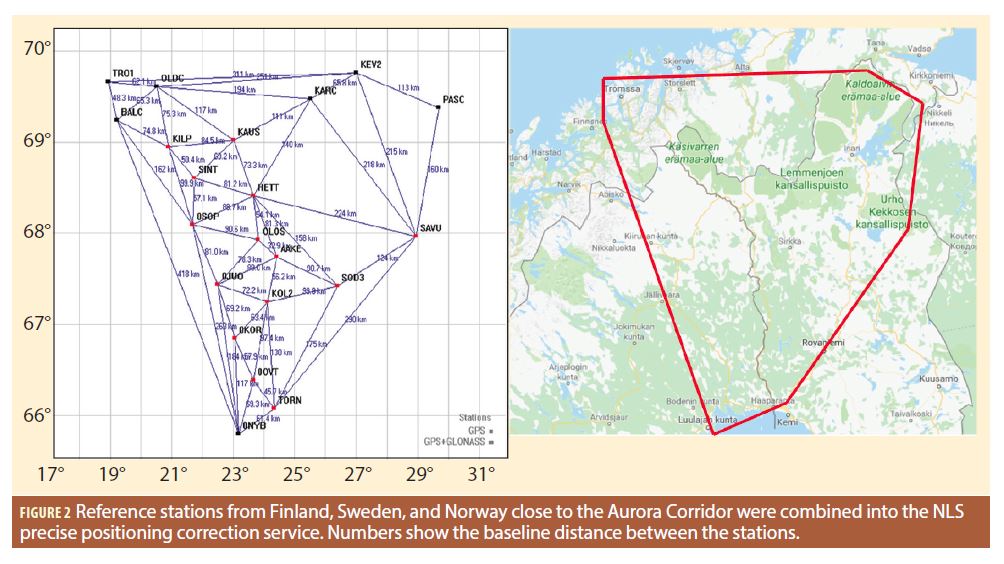
Figure 2 shows how reference stations from Finland, Sweden, and Norway were combined in the National Land Survey’s precise positioning service to offer a tailored correction service in the Aurora corridor area.
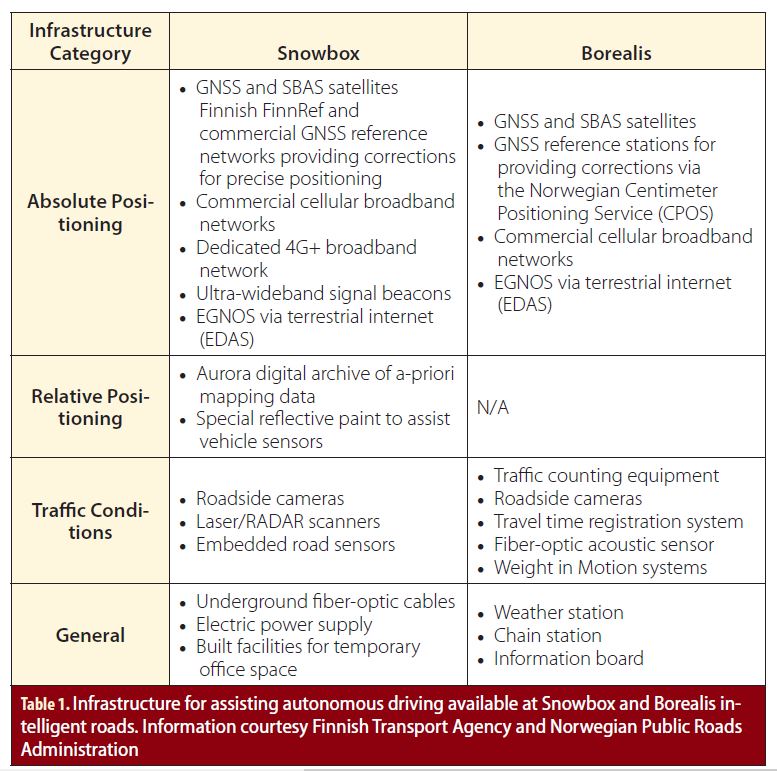
Lastly, Snowbox provides high-definition map resources of the road and surroundings, and ultra-wideband beacons are available for GNSS-independent precise positioning. Data and services in Aurora Snowbox are freely available for potential users. Table 1 summarizes the available infrastructure at Snowbox and Borealis.
The Arctic-PNT Innovation Platform Project
The project Arctic Positioning Navigation and Timing Innovation Platform: Nordic Hub based on the Snowbox Infrastructure, (“Arctic-PNT”) is supported by the European Space Agency (ESA) to analyze the role of Aurora Snowbox as a key infrastructure with regards to precise absolute positioning and navigation needs for AVs in Arctic conditions. The project is broadly divided into two Tasks. Task 1 consists of understanding the state of the art in PNT for AVs, to study the capabilities of Snowbox through literature surveys and interviews with key stakeholders, and to prepare a test plan for the experimentation campaign at Snowbox. Task 2 consists of recording positioning data from the Snowbox test road during two consecutive winters. Analysis of the results will help potential users to exploit fully the capabilities of Snowbox towards precise absolute localization in their own AV platforms. The project has successfully accomplished Task 1 and this article presents the results of the first winter experimentation campaign at Aurora performed in 2018 as part of Task 2.
Minimum Operational Requirements for Precise Absolute Positioning in AVs
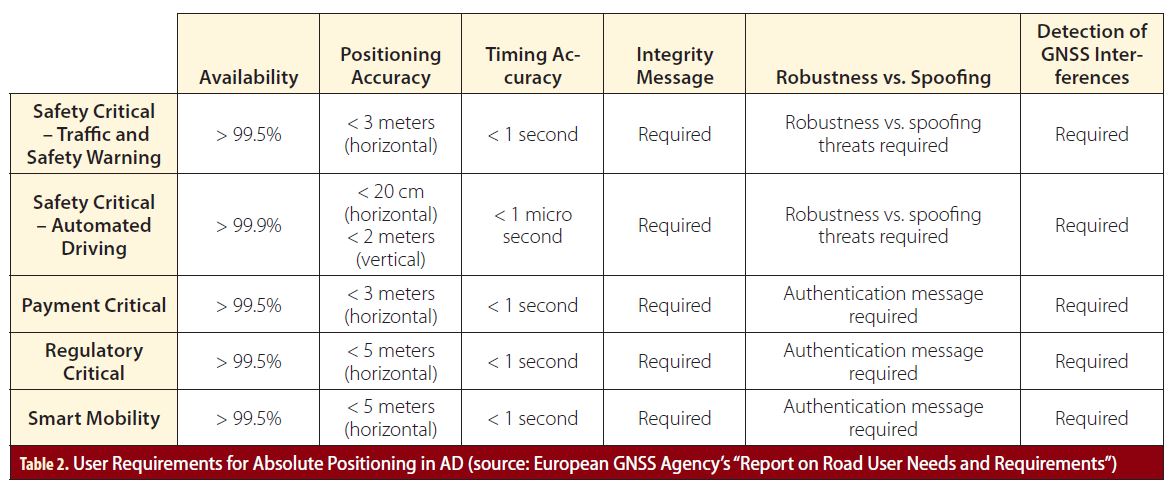
Based on a literature survey it was observed that there is no single standard definition of minimum operational requirements for absolute positioning performance in autonomous driving, defined as Level 3 and above on the driving automation scale from SAE International. The European GNSS Agency (GSA) recently released a report on road user needs and requirements, which is based on studies conducted through the European GNSS’ User Consultation Platform. Table 2 shows a summary of the different category of user requirements for absolute positioning in AD, as defined in this report.
Autonomous driving requires horizontal accuracy of position estimates to be approximately 20 centimeters with 95% confidence and availability better than 99.9%. The objective of the first phase of data analysis in the Arctic-PNT project was to investigate whether this level of accuracy and availability performance is possible at Snowbox using GNSS, SBAS, and precise positioning using correction data from reference networks. Note that validation of the positioning performance using other techniques for localization as well as the integrity performance was out of scope of the experimentation campaign and therefore not included here.
Measurement Campaign
The measurement campaign was performed over three days between March 26-28, 2018 when there was still considerable snow cover along the Snowbox test road. Data was recorded at multiple times during each day, to ensure diverse conditions of weather, road surface, visibility, satellite geometry, ionosphere, and animal and vehicular traffic, etc. would be recorded. One day was reserved for data recording on the Borealis test route inside Norway. The reference trajectory was computed using a dedicated professional-grade GNSS receiver and a high-grade Inertial Measurement Unit (IMU).
The VTT experimental autonomous car, Martti was used for the measurement campaign. It is a Volkswagen Touareg equipped with sensors, actuators, and control systems necessary for fully automated operations. The sensor set includes GNSS receivers, environment perception sensors (RADAR, LiDAR, and cameras), vehicle dynamics sensors, and a CAN-bus connection for data flow from the vehicle’s built-in sensors. In addition, the ITS-G5 and cellular LTE communication devices are available. The sensor data is readable via Ethernet inside the vehicle. Note that although the data from the diverse sensors was recorded, the vehicle was driven manually during the measurement campaign.
Both mass-market and professional-grade receivers were used in the experiments, and the same antenna input was provided to all the receivers (including the reference receiver). The mass-market receiver was not capable of processing the precise positioning correction data and therefore, it was used primarily for standard GNSS-only positioning. Also, the professional-grade receivers were capable of processing in real-time the DGNSS and RTK corrections but not the State Space Representation (SSR)-based PPP corrections. So, the DGNSS and RTK processing was performed in real-time, while PPP processing was performed post-mission using the in-house Matlab-based FGI-GSRx software navigation engine developed at FGI.
Positioning Results
Standard Positioning at Snowbox
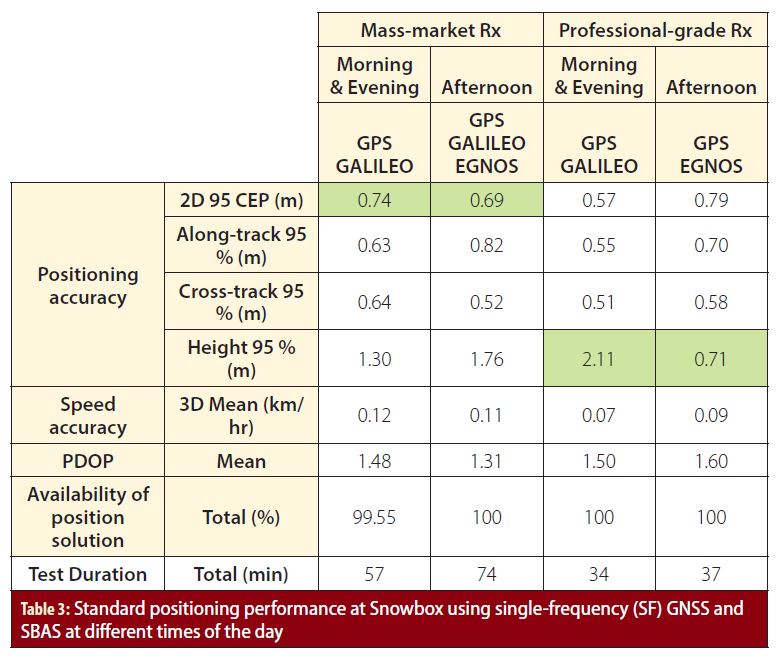
Table 3 shows the results of standard positioning performance at Snowbox using GNSS and SBAS with 1 hertz update rate at different times of the day. Note that to save on space only those receiver configurations providing the best performance have been shown. In general it was observed that for the mass-market receiver, adding Galileo and EGNOS improved the GPS-only performance, especially in the afternoon (left green row). For the professional-grade receiver however, the benefits of EGNOS were evident in improving the height estimation during the afternoon (right green row). Overall, under dynamic (moving vehicle) conditions both category of receivers offered similar performance.
Overall, using standard positioning, the best possible 95 Circular Error Probable (CEP) horizontal accuracy of about 60 centimeters in the early and late hours and 70 centimeters in the afternoon was obtained with better than 99.5% availability. A possible reason for this correlation between the performance and time of day may be the ionospheric delay, which is expected to be more pronounced during the afternoon as compared to early and late hours.
Although these are promising results, they are not sufficient to satisfy the requirements of autonomous driving and are provided here to give an idea of the GNSS-only baseline performance for absolute positioning that can be expected at Snowbox.
Differential-GNSS and RTK at Snowbox
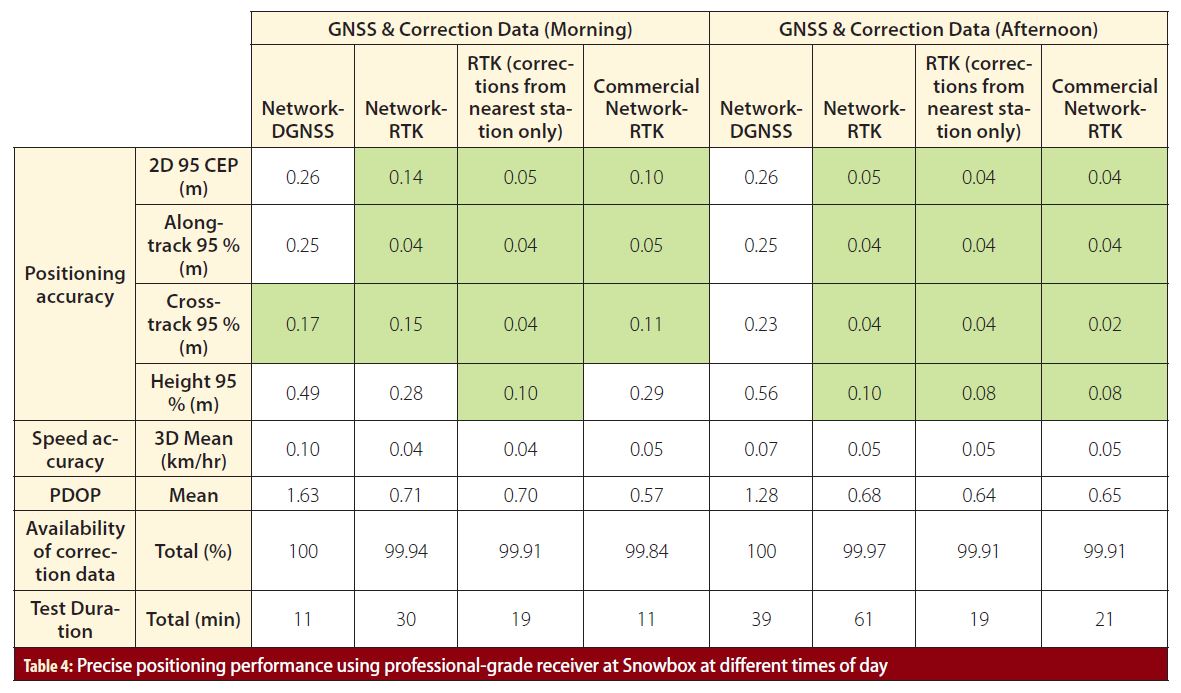
Table 4 shows the results of precise positioning performance using a professional-grade receiver at Snowbox at different times of the day. The receivers process GPS and GLONASS dual-frequency signals and are provided differential corrections in the form of DGNSS and RTK with a maximum baseline length of approximately 10 kilometers. This is possible due to the new FinnRef stations constructed in the vicinity of Snowbox to improve the local validity and density of the corrections.
As can be observed, DGNSS improves the accuracy performance to approximately 25 centimeters with an availability of 100%. However, it is when we apply the RTK corrections that the horizontal accuracy improves to within the bounds set for autonomous driving (marked in green). The best possible 95 CEP horizontal accuracy obtained was 4 centimeters with an availability of 99.9%. (Note that this refers to availability of correction data. The position solution was available 100% of the test duration, out of which 0.1% of the time correction data for precise positioning was unavailable e.g. due to a gap in mobile internet connectivity. However, during this gap the receiver was still providing standard position estimates based on GNSS-only).
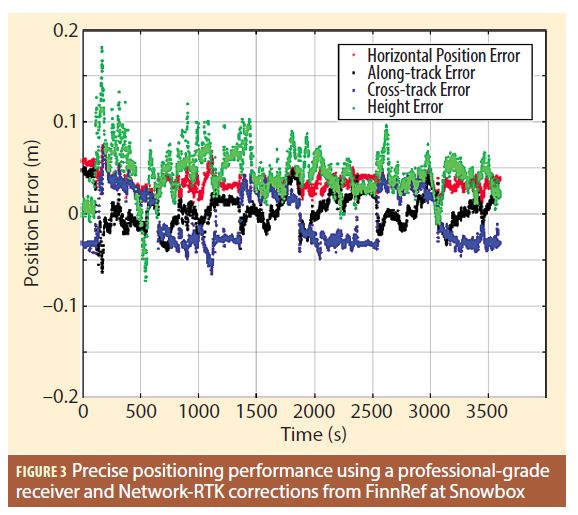
Figure 3 plots the different precise positioning error estimates over a duration of 1 hour using a professional-grade receiver and Network-RTK corrections from FinnRef. Note that in all of these scenarios the vehicle averaged a speed of 80 km/hr.
Positioning Results Along the Aurora Borealis Intelligent Corridor
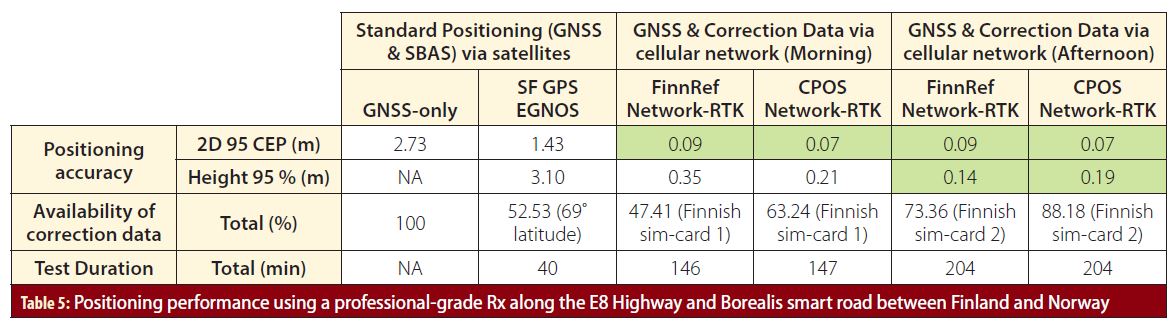
Table 5 shows the positioning performance along the E8 highway, from Muonio to Skibotn (196 kilometers). This includes the 10 kilometers Snowbox intelligent road and the 35 kilometers Borealis intelligent road inside Norway. Here it can be observed that EGNOS provides benefit over GPS-only positioning accuracy (note that it was not possible to estimate the height accuracy over the total duration for the GPS-only case). Taking into account the very high latitudes (>69˚) and the mountainous terrain at Borealis, it has an adverse effect on the visibility of the EGNOS satellites, and consequently on the availability of EGNOS-enabled position solution.
Table 5 also shows the results of precise positioning at Borealis using network-RTK corrections generated by the FinnRef and CPOS networks respectively. Note that the FinnRef corrections are computed based on the Finnish and nearby Swedish and Norwegian reference station data, while the CPOS corrections are computed exclusively from the Norwegian stations. The results show that the performance is comparable and satisfies the requirements for autonomous driving.
The availability of the corrections data was found to be strongly influenced by the data link through the mobile internet. During the two test sessions, two separate subscriber identification module (SIM) cards from two different Finnish mobile service providers were used for mobile connectivity under international data-roaming conditions. It can be observed that when using the second SIM card, correction data availability is greatly improved as compared to the first. In the future, similar scenarios have to be investigated using a SIM card from a Norwegian mobile services provider. In fact, this result is significant as it shows one possible challenge in enabling continuous operation of fully autonomous vehicles across international borders.
PPP Results
The PPP solution is calculated using the recorded single frequency GPS code and phase observables from professional grade receivers. Two receiver models from two manufacturers were used for logging the GPS data. As neither of these receivers support SSR corrections natively the PPP processing had to be conducted post-mission using the FGI-GSRx software navigation engine. Note that the PPP algorithm is currently based on float ambiguity estimation. The results (decimeter-level accuracy) achieved with this algorithm are in conformance with expected performance and background literature. Prior to PPP calculation, the observables are corrected using the State Space Representation (SSR) model and using the experimental SSR stream of the NLS precise positioning service. The SSR supplies corrections to orbit, clock, phase bias, code bias, and ionosphere errors.
It was observed that single-frequency PPP with float ambiguity resolution provides sub-half-meter 3D positioning accuracy, which is improved compared to standard positioning, but not as good as differential positioning. Therefore, even though the best case 95% horizontal accuracy is 17 centimeters, the overall performance does not consistently (meaning over multiple trajectories) achieve the requirements for autonomous driving.
The age of corrections does not critically affect the positioning accuracy at this level, since similar accuracy is achieved even when the corrections are several minutes old. Therefore the availability is resilient against network connectivity gaps to some extent, which is a significant advantage of PPP over RTK-based precise absolute positioning. Some test trajectories did not show an improvement over standard positioning; this result may indicate the experimental nature of both the SSR service and the positioning software at this stage.
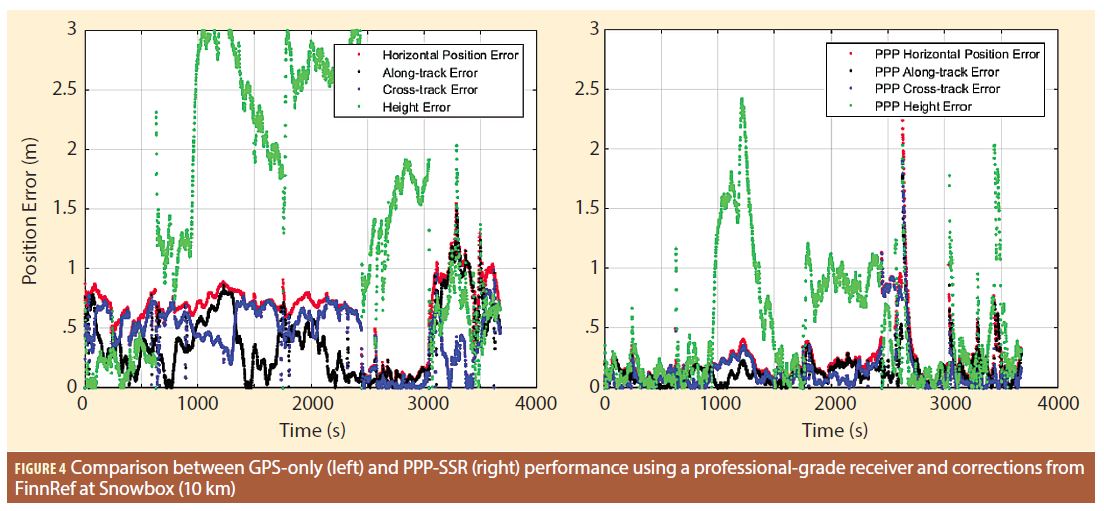
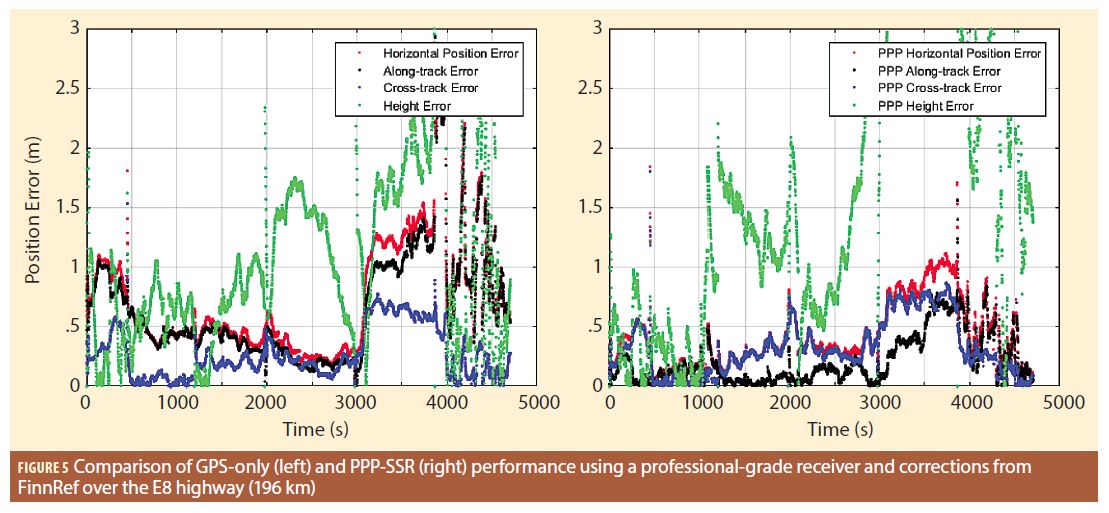
Figure 4 shows the improved positioning accuracy performance of PPP-SSR (right) in comparison to GPS-only (left) using a professional-grade receiver and corrections from FinnRef at Snowbox (10 kilometers). Figure 5 shows a similar comparison of results obtained while driving over the E8 highway from Muonio to Skibotn (196 kilometers). In this case, even though PPP-SSR does provide improvement over standalone-GPS, the benefits are not as pronounced as those obtained in the Snowbox area. The best case 95% 3D accuracy was 26 centimeters. Note that in both figures the test trajectory was over 1 hour long.
Conclusions and Future Steps
This article describes the Aurora Snowbox and Borealis intelligent roads and the diverse infrastructure deployed along them for vehicle localization. Assuming a 95 CEP accuracy of 20 centimeters and availability of better than 99.9% as reasonable user requirements for autonomous driving, this paper illustrates FGI’s experimentation campaign at Aurora to validate if these requirements are achievable under Arctic conditions. It was shown that using precise point positioning and network-RTK corrections with a professional-grade receiver the accuracy and availability requirements can be satisfied under dynamic conditions. At the same time, gaps were identified especially in continuous availability of GNSS correction data through cellular data-link when crossing international borders or visibility of SBAS satellites.
Acknowledgements
The Arctic-PNT project has been supported by the European Space Agency. The project acknowledges the assistance of the Finnish Transport Agency in providing access to Snowbox, of the Norwegian Public Roads Administration in providing access to Borealis, and of the Norwegian Kartverket in providing access to the CPOS corrections service. The experimentation campaign at Snowbox was conducted using the experimental autonomous vehicle Martti developed by the RobotCar Crew of the VTT Technical Centre of Finland Ltd.
Additional References
[1] Aurora Snowbox: https://www.liikennevirasto.fi/web/en/e8-aurora.
[2] Aurora Borealis: Norwegian Public Road Administration, ‘Intelligente Transportsystemer – ITS – E8 Troms’, map interface. Available at: http://vegvesen.maps.arcgis.com/apps/MapSeries/index.html?appid=aa75bc1fb9d741b3b0260dd241641e75.
[3] Arctic PNT project: https://arctic-pnt.org/.
[4] Martti experimental autonomous vehicle from VTT: vttresearch.com/ad
[5] Network-RTK: https://insidegnss.com/network-rtk-and-reference-station-configuration/
[6] “Report On Road User Needs And Requirements”: https://www.gsa.europa.eu/newsroom/news/gsa-road-report-highlights-user-pnt-requirements, European GNSS Agency
[7] SAE International’s definitions of terms related to autonomous driving: https://www.sae.org/standards/content/j3016_201806/
Authors
Sarang Thombre received his Doctoral degree from Tampere University of Technology in 2014. He works as a Research Manager and Research Group Leader at the Finnish Geospatial Research Institute. His research interests include positioning receiver implementation and performance validation, interference studies, and localization for autonomous vehicles.
Simo Marila received his M.Sc. degree in 2011 from Aalto University, Finland in the field of Geodesy. He is a Research Scientist at the Department of Geodesy and Geodynamics at FGI. He was involved in renewing the FinnRef network and his recent research is related to reliability and accuracy of GNSS positioning.
Martti Kirkko-Jaakkola received his Master’s and Doctoral degrees from TUT in 2008 and 2013, respectively. He works as a Research Manager at the FGI, National Land Survey of Finland. His research interests include precise satellite positioning and timing, MEMS inertial sensors, and indoor navigation.
Salomon Honkala
Michelle Koivisto is an assistant research scientist at FGI in the Department of Navigation and Positioning, where she has been working since 2017. Her research interests are GNSS receiver development, SBAS systems, Differential GNSS (DGNSS), GNSS modernization and autonomous navigation.
Hannu Koivula is the head of the Reference Systems research group at FGI. He has 20 years of research experience in high accuracy GNSS applications and GNSS networks. He has studied the accuracy of GNSS applications and lately specialized in metrological traceability of GNSS measurements.
Dr. M. Zahidul H. Bhuiyan is working as a Research Manager at the Department of Navigation and Positioning in the Finnish Geospatial Research Institute. His main research interests include various aspects of multi-GNSS receiver design, GNSS vulnerabilities, SBAS, differential GNSS, sensor fusion, etc.
Mark Petovello is a professor (on leave) at the University of Calgary. He has been actively involved in many aspects of positioning and navigation since 1997 and has led several research and development efforts involving Global Navigation Satellite Systems (GNSS), software receivers, inertial navigation systems (INS) and other multi-sensor systems. E-mail: ma************@***il.com




