Q: What are vector tracking loops, and what are their benefits and drawbacks?
A: Vector tracking loops are a type of receiver architecture. The difference between traditional receivers and those that use vector tracking algorithms is the manner in which they process the received GNSS satellite signals, and how they determine the receiver’s position and velocity.
Q: What are vector tracking loops, and what are their benefits and drawbacks?
A: Vector tracking loops are a type of receiver architecture. The difference between traditional receivers and those that use vector tracking algorithms is the manner in which they process the received GNSS satellite signals, and how they determine the receiver’s position and velocity.
Vector-based tracking loops combine the two tasks of signal tracking and position/velocity estimation into one algorithm. In contrast, traditional — or scalar — tracking methods track each satellite’s signal(s) independently; both of each other and of the position/velocity solution.
Vector tracking has many advantages over scalar tracking loops. The most commonly cited advantage is increased immunity to interference and jamming. The minimum carrier-to-noise power density ratio (C/N0) at which the receiver can operate is lowered by processing the signals in aggregate instead of separately.
Vector tracking algorithms also have the ability to bridge signal outages and immediately reacquire blocked signals. Moreover, vector tracking loops have a greater immunity to receiver dynamics than scalar tracking loops.
A final advantage: The vector tracking architecture allows the receiver’s motion to be constrained in different dimensions, which can be exploited by receivers whose motion occurs primarily in one or two directions, such as ships or automobiles, for example.
The primary drawbacks of vector tracking loops relative to traditional approaches are their processing load and complexity. The Kalman filter used by the vector tracking architecture (more details to follow) must be iterated on a time scale commensurate with the integrate-and-dump period used by the algorithm (~ 50 Hz). The numerically controlled oscillators (NCOs) in each channel also must be controlled directly by the central Kalman filter.
Another drawback of vector tracking is that the presence of a fault in one channel will affect all the other channels, possibly leading to receiver instability or loss of lock on all satellites.
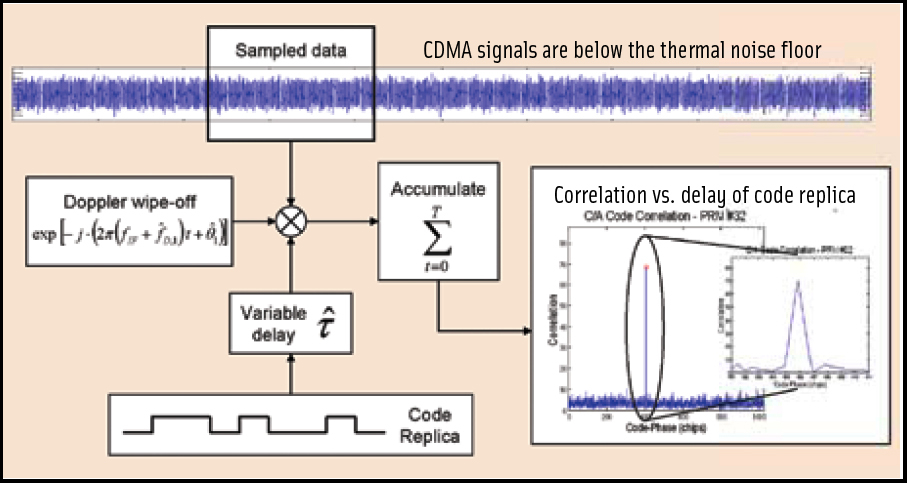
Before discussing how vector tracking loops operate, let’s first review how a traditional receiver operates. Figure 1 (above, right) shows a block diagram of a typical GPS receiver.
… In Figure 1, note that the flow of information in the receiver is strictly from left to right. Each channel of the receiver tracks its respective signal independent of the other channels. In addition, no information from the navigation processor is fed back to the tracking loops …
… By its very nature, the traditional receiver architecture does not exploit the inherent relation between signal tracking and navigation state estimation …
…In contrast to traditional receivers, vector tracking algorithms exploit the inherent coupling between signal tracking and navigation solution computation, and combines them into a single step. In other words, in a vector tracking approach, the navigation processor is used to perform both tasks and eliminates the need for intermediate tracking loops …
… We should note that the phase of the received carrier signals can also be tracked using the vector tracking approach. This is referred to as a vector phase lock loop (VPLL). The VPLL requires an alternate formulation of the central EKF due to the fact that the carrier phases of the received signals cannot be predicted unambiguously from the filter states …
… The advantage of vector tracking over scalar tracking loops stems from the number of unknowns that the two algorithms are attempting to estimate, and how the unknowns are related to the available measurements. A traditional receiver uses N scalar DLLs to estimate N pseudoranges. In contrast, a VDLL uses N pseudorange residuals to estimate four states …
… the performance of vector tracking is a function of how many satellites are available and their geometry. To determine the relative performance advantage of the vector-tracking algorithm for a typical GPS receiver, the visible satellite constellation was recorded every minute for about 14 hours at Auburn University …
… The reduction in C/N0 ratio needed to make the largest pseudorange variance equal to 34.1 m2 is defined as the minimum gain in effective C/N0 ratio. Conversely, the reduction in C/N0 ratio needed to make the smallest pseudorange variance equal to 34.1 m2 is defined as the maximum gain in effective C/N0 ratio …
In conclusion, vector tracking algorithms combine the operations of signal tracking and navigation state estimation. The performance improvement brought about by vector tracking is contingent on the number of available satellites and their geometry. The only major drawbacks of vector tracking are their complexity and computational loads.
(For Matthew Lashley and David Bevly’s complete answer to this question, including formulas and tables, please download the full article using the pdf link above.)
SUGGESTED ARTICLES:
[1] Benson, D., “Interference Benefits of a Vector Delay Lock Loop (VDLL) GPS Receiver,” in Proceedings of the 63rd Annual Meeting of the Institute of Navigation. Cambridge, Massachusetts, Institute of Navigation, April 2007
[2] Petovello, M., and G. Lachapelle, “Comparison of vector-based software receiver implementations with application to ultra-tight GPS/INS integration,” in Proceedings of ION GNSS 2006. Fort Worth, Texas, Institute of Navigation, September 2006.
[3] Spilker, J. J., “Fundamentals of Signal Tracking Theory,” in Global Positioning System: Theory and Applications, Vol. I. Progress in Astronautics and Aeronautics, Volume 163, AIAA, Washington, D.C., 1996




