
A new API for GNSS simulators enables greater accuracy, integrity and control for growing sensor-fusion testing needs. Spirent Communications’ SimHIL, an integrated hardware-in-the-loop (HIL) testing software API for Spirent GNSS simulators, brings high-fidelity GNSS signal simulation with low latency to automotive industry HIL testbeds.
SimHIL software was developed to meet the automotive industry’s growing need for realistic positioning, navigation and timing testing for sensor fusion, according to the company. As car buyers demand more advanced driver-assistance system (ADAS) features and advanced infotainment systems, the automotive manufacturers’ test labs must combine Wi-Fi, camera, lidar, radar, inertial and GNSS data that power these advanced automotive systems. ADAS features increasingly and critically rely on accurate positioning.
SimHIL helps test engineers bring accurate, controlled and coherent data from GNSS and inertial sensors to their sensor fusion algorithms within HIL test environments. Facilitating the ultra-low latency, complete control, enhanced realism, and ease of use and setup of Spirent GSS7000 and GSS9000 GNSS simulators, SimHIL meets the needs of OEMs and tier-one suppliers developing ADAS, V2X and sensor fusion engines.
The new SimHIL API enables:
• External motion input: real-time direct motion and trajectory data input from simulators.
• Sensor fusion: introducing GNSS signals into sensor fusion engines.
• Vehicle-to-Infrastructure (V2X) testing: validation and performance benchmarking of V2X applications.
• Infotainment system testing: real-time scenario feedback to system and driver responses.
• Vehicle-in-the-loop (VIL): final production form product testing.
• Accurate testing: reliable results supported by ultra-low latency simulation. Criticality of ADAS features, such as lane assist and automatic braking, mean that 3+ metres of uncertainty introduced by higher latency systems is not sufficient.
V2X Testing
The V2X emulator allows engineers to test the dynamic behaviour of V2X entities (both OBUs – “OnBoard Unit”; and RSUs – “Road Side Unit”) in a virtual environment that accurately re-creates the key conditions such devices would face in the field. The user can choose test scenarios for pre-set V2X safety applications, as well as the geographical location where the test will play out, giving the freedom to simulate tests anywhere in the world.
Other key parameters such as performance metrics, acceptance criteria and the number of vehicles present, are also under the user’s control. Importantly, the emulator combines software and hardware simulation, creating a comprehensive, virtual field test environment. The Device Under Test uses real signals to communicate with virtual vehicles and its environment, while performing well-established safety application trials.

As depicted in the picture at left, Spirent partner Tata Elxsi provides a graphical user interface (GUI) to set-up and run V2X test scenarios. SimHIL can basically bring the motion of the EGO vehicle (the vehicle that contains the sensors that perceive the surrounding environment, including other “non-ego” vehicles) in the scenario into our GNSS simulation in real-time, so we generate all the corresponding RF environment.
Spirent has worked with leading suppliers to ensure SimHIL is compatible with their HIL platforms. Because of its open API, there’s broad scope for additional custom third-party integrations. SimHIL is a commercial-off-the-shelf (COTS) product; the company tests for new versions of third-party software, fixes bugs, offers customer support, and so on.
Integration with Commercial Driving Simulators
SimHIL has 3 different versions that the customer can purchase: SimHIL for dSPACE, SimHIL for IPG and SimHIL for AV Simulation. Each of them relates to an integration with a commercial driving simulator. Spirent supports a range of interfaces.
In addition, Spirent has made SimHIL compatible with all its software versions: SimTEST, SimREPLAY+ and SimGEN.
dSPACE, IPG and AV Simulation are industry leaders that provide simulation software and hardware to test vehicle development at different stages. Their products provide a vehicle trajectory to Spirent’s GNSS simulator in real-time so it can generate the corresponding GNSS signals. As they are different vendors, the vehicle trajectory is generated using a different environment for each case, thus the 3 different versions of SimHIL to interface with each.
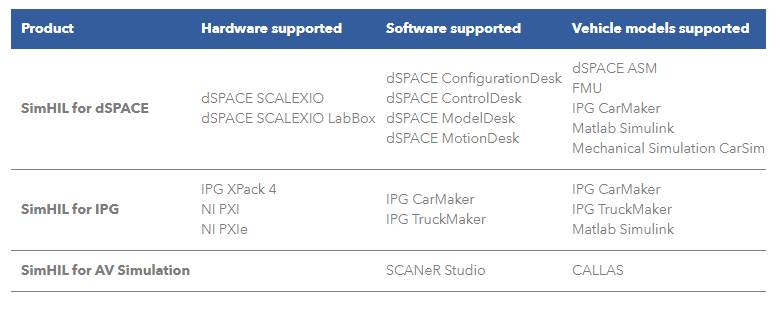
The table above shows what each SimHIL version supports:
Hardware means the physical platform that that runs the driving simulation. dSPACE, IPG and NI have their own hardware platforms that Spirent integrates with. AV Simulation uses Windows PCs for now.
Software refers to the simulation software used. This is a set of tools that allow the user to create driving scenarios (e.g. San Jose), run them and analyze the results.
The Vehicle Model is the source of the vehicle data. Audi, Ford, Volvo and other vehicle manufacturers all have their own vehicle models because their cars behave in a different way in the same scenario. These vehicle models are designed and stored using the tools listed in the table.
SimHIL requires the three of them to integrate with the GNSS simulator. A vehicle model that is prepared (together with the scenario) using some simulation software, and will run using certain hardware that physically connects to our simulator using ethernet protocols.
AV Simulation offers a simulation software for automotive applications with a strong focus on the modularity and openness of their solution.
IPG are experts in virtual test driving and their software CarMaker is extensively used to develop and test systems and system networks of vehicles.
dSPACE provides hardware and software solutions to develop and test ECUs and control systems, mainly for cars.
Two other Spirent partners: CarSim provides realistic vehicle models to test the behaviour of these vehicles in different scenarios. National Instruments provides real-time hardware to run simulation software and solve vehicle models.
Sample SimHIL configuration
“When used with our GSS7000, SimHIL latency is less than 40ms from motion command to RF output and supports all GNSS and SBAS signals,” said Ricardo Verdeguer Moreno, Product Manager for Connected and Autonomous Vehicles at Spirent. “SimHIL is also compatible with all the options and features available in Spirent’s GNSS simulators, including ionospheric and tropospheric modelling, antenna patterns, date and time settings, and obscuration and multipath effects via Sim3D.”
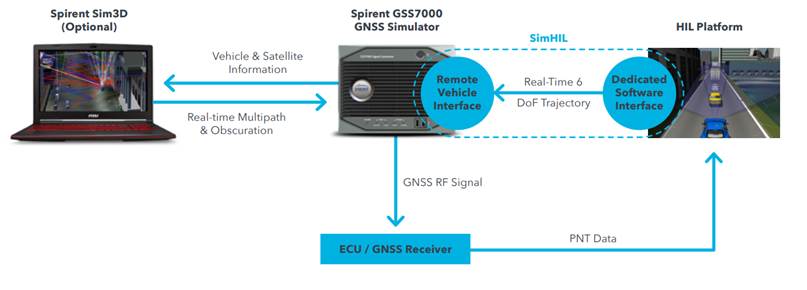
The vehicle on the right is a simulation and it’s on the street. The vehicle is driving on a virtual 3D model of San Jose and generating the output trajectory in dSPACE’s environment. SimHIL sends that trajectory in San Jose using the “Dedicated Software Interface” (which is different for dSPACE, IPG and AV Simulation) and the “Remote Vehicle Interface” (which is a common feature of Spirent’s GNSS simulators).
This particular set-up also uses Sim3D (optional and on the left). Sim3D is computing in real-time the obscuration and multipath effects that the GNSS signal would experience in San Jose at a time specified by the driving simulator.
The ECU or GNSS receiver will pick up the signals from the GNSS simulator and would believe that is in San Jose (in this scenario) and would move accordingly as the simulation continues.
Control and Motion Commands
Spirent’s GNSS simulator can receive in real-time input from another simulator or PC, using ethernet protocols UDP and TCP.
Using TCP, the simulator can send control commands. These commands are sent upon the user’s request and can perform actions related to the GNSS scenario: run GNSS simulation, stop GNSS simulation, change data and time, turn off satellite, etc.
Using UDP, it can send motion commands. These commands are sent continuously once the simulation has already started. They contain information about the trajectory that the vehicle is following. Their mission is to update the vehicle trajectory in the GNSS simulator in real-time. The following screenshot depicts this scenario.
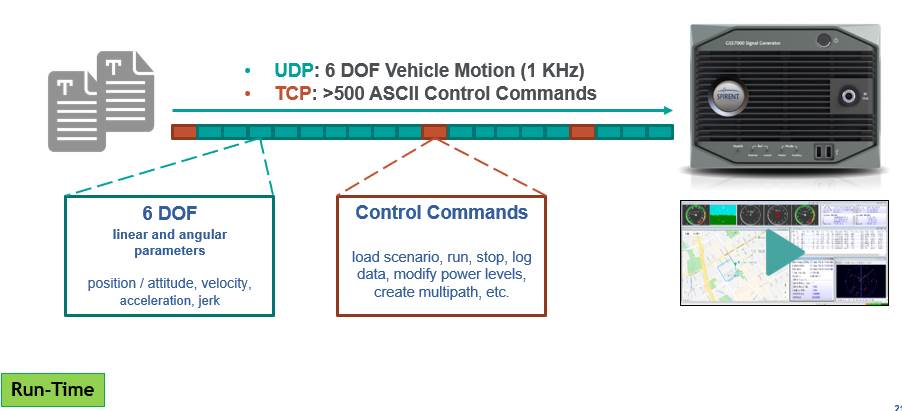
Users can easily configure and control both the GNSS scenarios, and signal generation and vehicle motion from within the HIL simulator GUI, saving time and the possibility of error.
Spirent offers three service packages alongside SimHIL to help customers mitigate project risk and reduce the time from delivery to useful deployment:
Baseline – Setup and commissioning of existing DSI.
Enhanced – Includes implementation service and enhanced support.
Custom – Bespoke development of non-standard DSI.
For more information, visit the SimHIL information page.




