
Figure 2: Coherent Integration Time Limits
Return to main article: “Coherent Integration Time Limits”
By Inside GNSSGlobal Navigation Satellite Systems Engineering, Policy, and Design
Return to main article: “Coherent Integration Time Limits”
By Inside GNSS
Return to main article: “Coherent Integration Time Limits”
By Inside GNSS
 Equation: signal variance for a “ring of scatterers” model
Equation: signal variance for a “ring of scatterers” modelIndoor GNSS propagation environments are characterized by multiple reflected signal paths (multipath) terminating at the receiver. Consequently, the received signal’s amplitude, phase, and perceived angle of arrival attributes vary randomly as the receiver moves. This has created significant interest among receiver designers and manufacturers to develop powerful processing for GNSS handsets such that these can operate effectively in indoor faded environments.
By Inside GNSS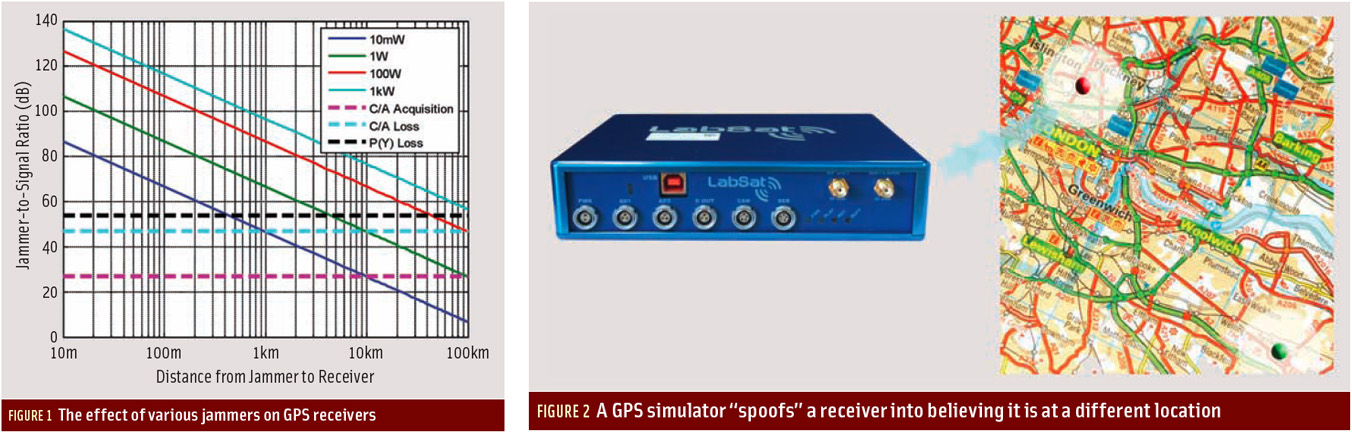 Figures 1 & 2
Figures 1 & 2For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
Growing dependence on GNSS for positioning, navigation, and timing (PNT) has raised a parallel concern about the potential risks of signal interference. The popular press has recently highlighted accounts of car thieves using GPS jammers, solar flares pumping out L-band radiation, and faulty television sets causing havoc to GPS receivers across an entire harbor.
By Inside GNSS Figure 1 & Table 1
Figure 1 & Table 1For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
Recent years have seen GPS receivers built in as a standard feature in many consumer products. A growing number of mobile phones, personal navigation devices, netbooks and tablets are equipped with GPS receiver chips and navigation software that enable consumers to navigate from A to B or find their nearest coffee shop. According to Berg Insight, annual shipments of GPS-equipped mobile phones are estimated to reach 960 million devices in 2014.
By Inside GNSS
Return to main article: GNSS Interoperability
 FIGURE 1 (a, b, c) & FIGURE 2
FIGURE 1 (a, b, c) & FIGURE 2For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
In the early stages of developing space-based radionavigation, the spectrum compactness of ranging signals was not proclaimed among the material priorities. Conventional bi-phase shift keying (BPSK) modulations, although they consume a rather large amount of spectrum, were adopted as the basis for both GPS and GLONASS signals.
By Inside GNSS
For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
Galileo receiver designers require formal interface specifications for the Galileo signal-in-space (SIS) in order to write unambiguous and accurate specifications for Galileo receivers. To compute their positions, Galileo receivers must be able to retrieve timing and orbital information from the data stream conveyed in Galileo analog signals.
By Inside GNSS FIGURES 1, 2 & 3
FIGURES 1, 2 & 3For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
In satellite navigation, a GNSS receiver must account for several sources of error such as relativistic effects, atmospheric propagation delay, offset of satellite clocks from system time and satellite ephemeris. In order to accurately compute user position, velocity, and time (PVT), these errors need to be predicted/estimated precisely.
By Inside GNSS
The GPS program continues progress on several fronts — in space and on the ground.
During fall 2010, the U.S. Air Force and the Raytheon Company team developing the GPS Advanced Control Segment (OCX) successfully carried out an integrated baseline review (IBR) for the next-generation system on schedule.
When completed in 2015 under the current schedule, GPS OCX will deliver control segment enhancements designed to provide secure, accurate and reliable navigation and timing information to military, commercial and civil users.
By Inside GNSS
Return to main article: Local Oscillator Phase Noise
In 1966 D.B. Leeson proposed an empirical linear model for the noise spectrum of an oscillator, which has been extensively cited in the literature since then. G. Sauvage generalized this model to other resonant circuits in 1977, providing a deeper mathematical background. In 1998 A. Hajimiri and T.H. Lee proposed a linear time variant model (LTV) to explain the effect of each of the noise sources of an oscillator on its phase noise.
By Inside GNSS
 Antonio Tajani
Antonio TajaniAmid continuing debate over how to handle budgetary shortfalls in building a European GNSS, the European Space Agency (ESA) signed a €194 million ($270.5 million) contract on October 25 with SpaceOpal to provide space- and ground-based services to operate the Galileo constellation once it has been fully deployed.
By Inside GNSS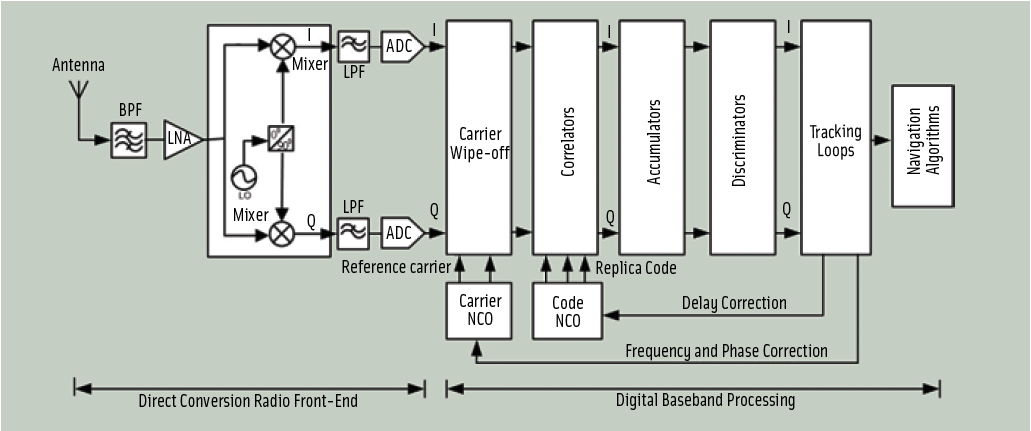 FIGURE 1: Block-diagram of a GNSS direct-conversion receiver
FIGURE 1: Block-diagram of a GNSS direct-conversion receiver
For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
GNSS systems rely on direct sequence spread spectrum (DSSS) transmissions to achieve high receiver sensitivity. Typically, GNSS user equipment compares the signal received from a satellite with an internally generated replica of its corresponding code until the maximum correlation for a given delay is achieved. This provides an indirect measurement of the satellite-receiver range.
By Inside GNSS