Baška GNSS Conference 2015
The 10th Baška GNSS Conference will take place May 8–10, 2016, in Baška, Krk Island, Croatia, organized jointly by The Royal Institute of Navigation (London, UK), Faculty of Maritime Studies (University of Rijeka, Croatia), and the Faculty of Transport and Traffic Sciences (University of Zagreb, Croatia), with technical co-sponsorship from Beihang University of Aeronautics and Astronautics (Beijing, China)
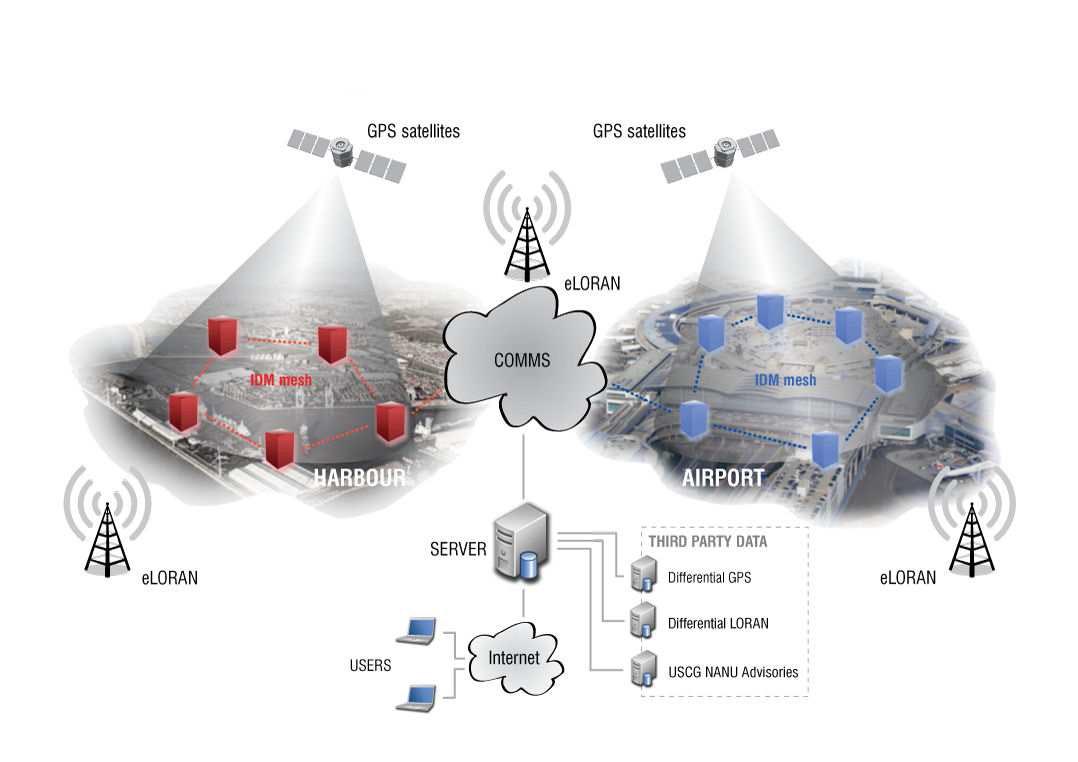
The conference focuses on GNSS resilience and GNSS applications development. The deadline for submitting an abstract (300 – 500 words) of a proposed paper is February 22, 2016. Please contact Renato Filjar.
Please contact Ms Sally-Anne Cooke (e-mail <co********@*****rg.uk>) or Mrs. Marija Šimić-Hlača (e-mail: <ma****@**ri.hr>) for further information.
By Inside GNSS