July 16, 2013
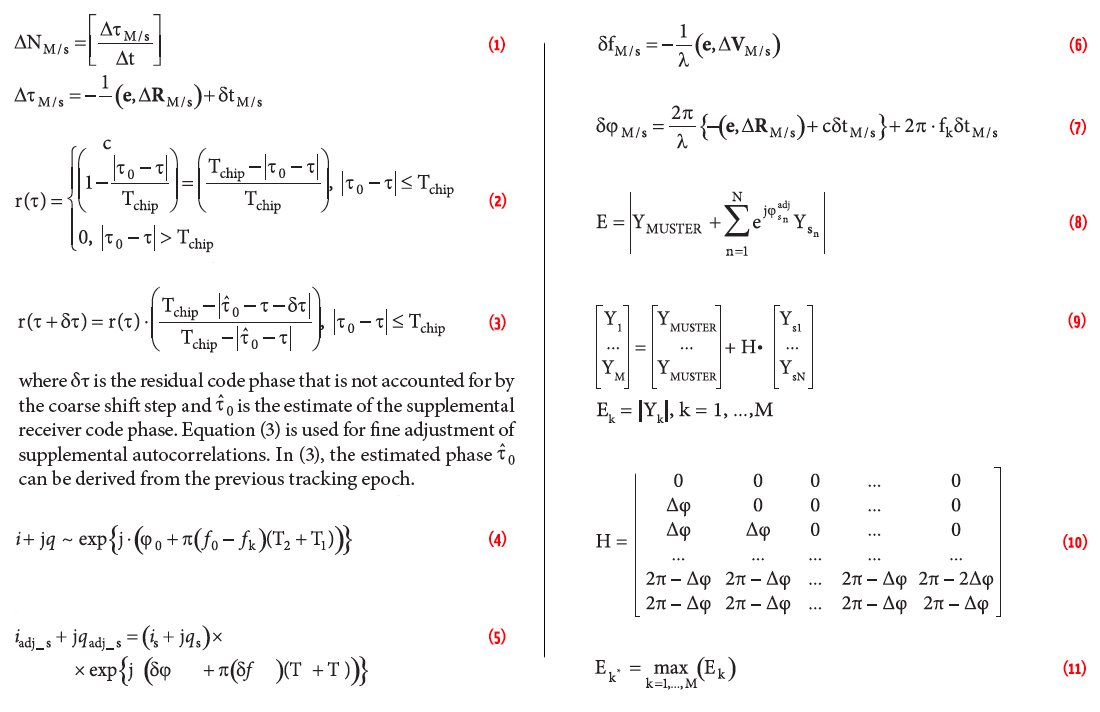
 Equations
Equations
Integrity for Aviation
EquationsWorking Papers explore the technical and scientific themes that underpin GNSS programs and applications. This regular column is coordinated by Prof. Dr.-Ing. Günter Hein, head of Europe’s Galileo Operations and Evolution.
By Inside GNSS