The U.S. Army Research Lab awarded the University of Central Florida a $4.5 million grant to develop a smart, computer vision-based navigation system for when GPS is unavailable or jammed. The system will use artificial intelligence and machine learning to assess computer images captured by the vehicle and by unmanned aerial vehicles (UAVs). It will help drivers determine where they are and how to get to where they are going in complex terrain.
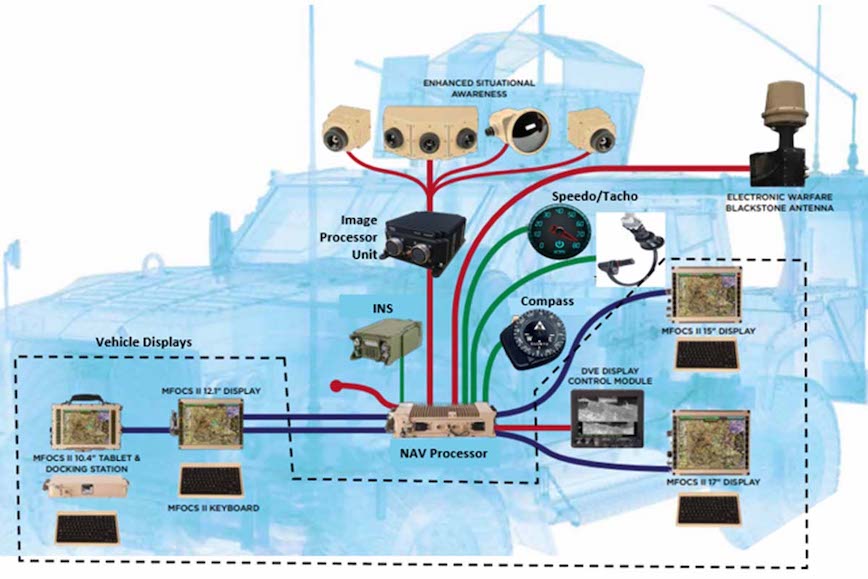
[Image above shows the concept of a smart, computer vision-based navigation system using multi-sensor inputs and geospatial databases to determine vehicle position. Courtesy University of Central Florida.]
The system will use geospatial databases to identify landmarks for correlation to imagery and will track object movements through video to estimate motion. The researchers will combine these techniques using artificial intelligence to do this precisely and autonomously.
In addition to navigating in GPS-denied environments wherein adversaries can jam or spoof GPS signals, the project is “also about supporting ground vehicles with off-board sensors on UAVs that can provide additional perspectives for awareness and threat detection in complex, typically urban, scenarios,” says Kyle Renshaw, the project’s principal investigator and an assistant professor in UCF’s College of Optics and Photonics (CREOL).
Also participating is UCF’s Center for Research in Computer Vision (CRCV), one of only two institutions in the nation to offer a computer vision master’s degree program.
“Researchers at CREOL are experts in sensors and optics and data collection and integration, and CRCV is a world leader in computer vision and machine learning,” says Mubarak Shah, a UCF Trustee Chair Professor of Computer Science and director of the Center. “CRCV researchers will develop algorithms to automatically analyze the data collected by the CREOL team to extract relevant features from mission imagery in order to match with geo-tagged reference imagery for GPS denied combat navigation.”
The team will also partner with researchers Ron Driggers from the University of Arizona, who has extensive experience in infrared imaging systems, and Eddie Jacobs with the University of Memphis, who brings expertise in unmanned aerial vehicles.
“Of course, the technologies and solutions we’re working on can also translate to a wide range of problems from autonomous driving to border security to disaster response,” adds Renshaw.
The project award is for four years, with two years awarded now and a two-year option for Army Research Labs to continue funding the work.




