“The future of navigation is inertial plus . . . some other sensor,” states Michael Braasch at the opening of this month’s webinar. “One sensor suite determines position, velocity and attitude.”
For those of us accustomed to thinking of GPS as, if not the be-all and end-all for navigation, at least the backbone or core of any navigation suite, present or future — well, maybe, not so fast.
Inertial has everything you want. “It’s immune to interference and jamming. It has high data rates, from 50 to 1,000 Hz, and low latency.”
“Inertial does have one weakness,” admits Braasch, a professor of engineering at Ohio University, where he has researched and taught navigation systems for the past 34 years. “It is relatively unstable over time.” GPS/GNSS can compensate that weakness.
Braasch goes on to give a 16-minute encapsulated technical tutorial on inertial navigation, characterizing its error sources, describing the Kalman filter and explaining inertial navigation system (INS) aiding.
His presentation is followed by a talk on photonic fiber-optic gyros (FOGs) for autonomous applications. This new photonic development brings high-performance inertial technology down in cost so that it is practical and affordable for autonomous platforms. Given by Jan Khan, principal optical engineer at KVH Industries, the second half of the free November 20 webinar explains how this new type of inertial measurement unit enables autonomous vehicles to rely on internal sensors — not GPS — for outages of 2 minutes up to 10 minutes.
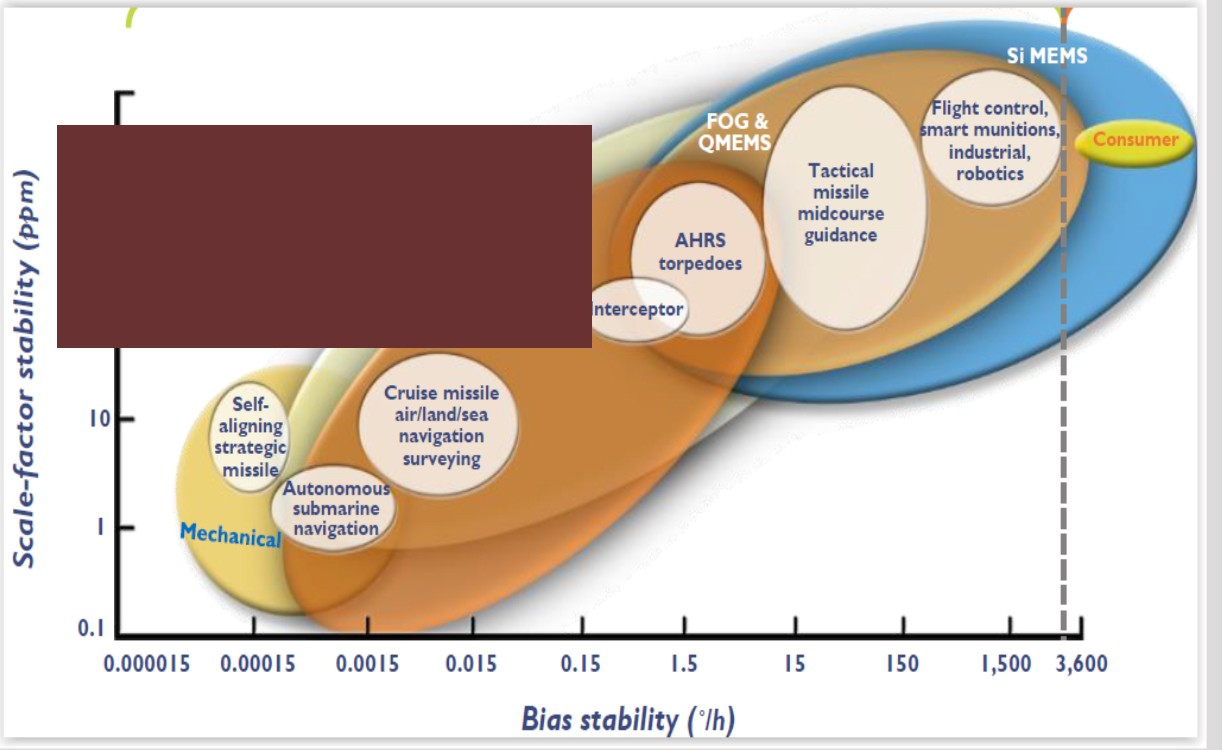
[Above: Inertial sensor technology for autonomous navigation. Image: KVH Industries.]
The photonic gyro has performed in the top percentile of gyro performance specifications:
Bias Instability: 0.02 ˚/hr
ARW: <0.01°/√Hz
Scale Factor Temp: <50 ppm
Linearity Error: <50 ppm
Bias temperature: ≤1.0 ˚/hr, 1σ
Titled “Inertial Breakthroughs for the Autonomous Vehicle,” the webinar takes place on Wednesday, November 20, 2019 from 1:00 PM – 2:30 PM Eastern time. The webinar is sponsored by KVH, Inside GNSS and Inside Unmanned Systems magazine.



