Since last reported in the November/December 2016 issue of Inside GNSS, significant progress has been made to extend the use of Global Navigation Satellite Systems (GNSS) for Positioning, Navigation, and Timing (PNT) in High Earth Orbit (HEO). This update describes the results of international efforts that are enabling mission planners to confidently employ GNSS signals in HEO and how researchers are extending the use of GNSS out to lunar distances.
Starting with nascent GPS space flight experiments in Low-Earth Orbit (LEO) in the 1980s and 1990s, space-borne GPS is now commonplace. Researchers continue expanding GPS and GNSS use into—and beyond—the Space Service Volume (SSV), which is the volume of space surrounding the Earth between 3,000 kilometers and Geosynchronous (GEO) altitudes. This has spawned exciting space missions through the promise of improved PNT performance, quick trajectory maneuver recovery, and enhanced on-board autonomy. However, there are limitations that need to be addressed when using GNSS signals in HEO because of their weak signal strength and the limited number of over-the-limb signals available from any one GNSS constellation.
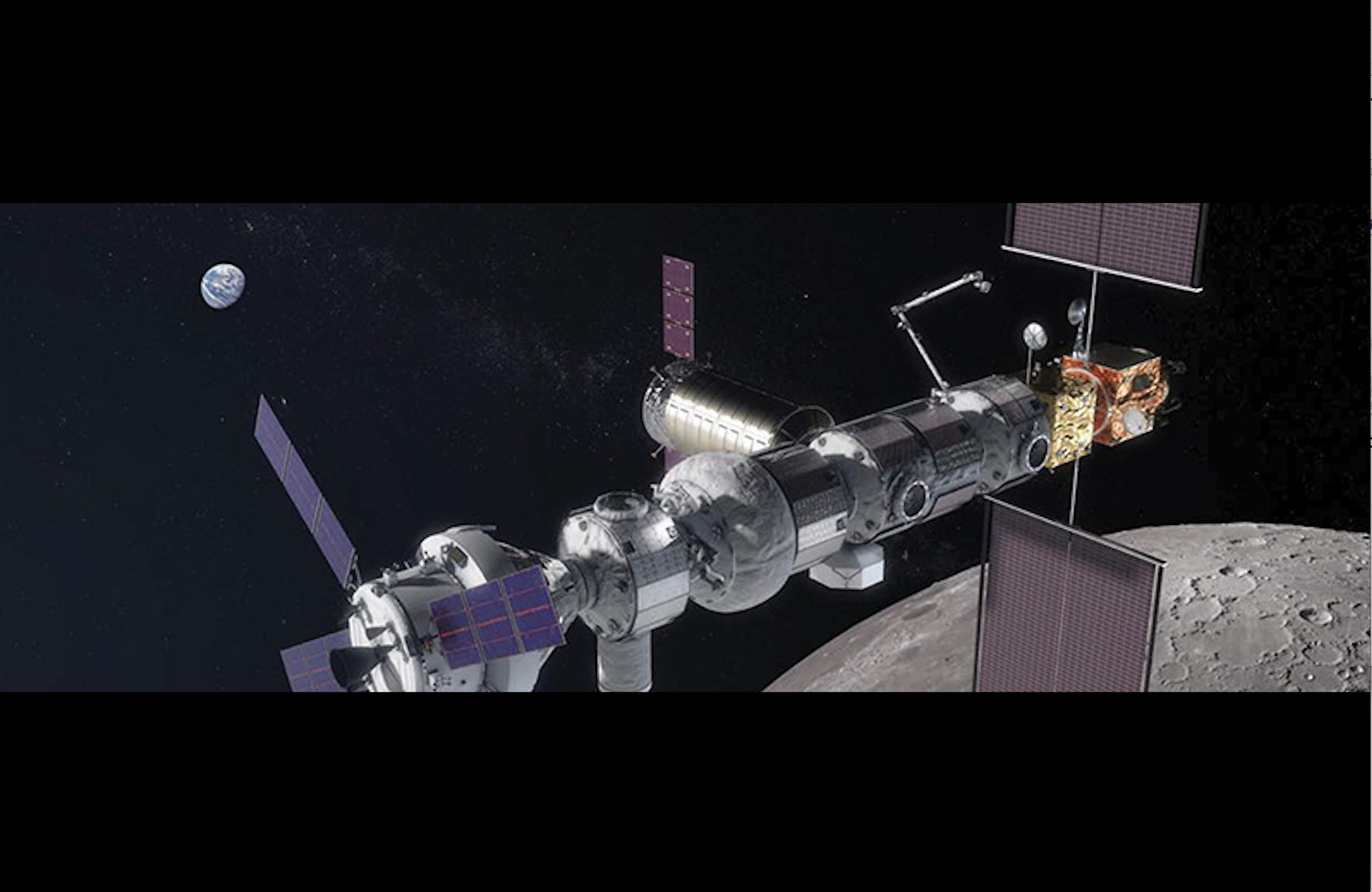
With the recent development and deployment of multiple GNSS constellations, and ongoing upgrades to existing ones, multi-GNSS signal availability in HEO is set to improve significantly. Users could soon employ four operational global constellations and two regional space-based navigation and augmentation systems, respectively: the U.S. GPS, Russia’s GLONASS, Europe’s Galileo, China’s BeiDou (BDS), Japan’s Quasi-Zenith Satellite System (QZSS), and India’s Navigation with Indian Constellation (NavIC). When combined, such “super-constellation” of 100+ GNSS satellites greatly improves signal coverage and also increases the diversity of system architectures, frequencies and geometry. This, in turn, improves overall PNT performance and resiliency. With such new PNT capabilities underway, mission planners are setting their sights well beyond the SSV, even employing GNSS on upcoming missions such as the lunar-orbiting Gateway.
Moving from Dream to Reality
Within the National Aeronautics and Space Administration (NASA), the Space Communications and Navigation (SCaN) Program Office leads efforts in PNT development and policy. Numerous missions have been flown in the SSV, dating back to the first flight experiments in 1997. NASA, through SCaN and its predecessors, has supported high altitude GNSS development for more than 20 years. Others around the globe, including the European Space Agency (ESA), have also performed similar flight experiments to demonstrate feasibility of employing GNSS at high altitudes. However, to fully exploit all the GNSS signals, particularly given the signal-sparse environment at high altitudes, the dream of ubiquitous PNT in HEO and beyond will only be realized if GNSS constellations are designed to be interoperable for SSV use and their capabilities clearly documented and supported.
Recently there has been a transition from experimentation to operational use of GNSS in high altitudes, including the Magnetospheric Multiscale Mission (MMS) and the Geostationary Operational Environmental Satellite (GOES-16). MMS is a NASA Solar Terrestrial Probe launched in 2015 and currently in a 1.2 Earth Radii (RE) x 25 RE orbit, which is more than 40% of average lunar distance. MMS navigation performance has significantly exceeded mission requirements thanks to the availability of GPS signals. GOES-16 is the on-orbit designation of the first of four NASA / National Oceanic and Atmospheric Administration (NOAA) GOES-R series of weather satellites being launched between 2016 and 2024. GOES-R represents a major leap forward in capability and technology, with GPS a critical element in making this happen, and improves weather forecasts to 5–7 days, a full two days greater than the current capability, along with numerous other specific improvements and new capabilities. It is due to this demonstrated on-orbit performance that the GOES-R team has recommended that future GEO satellites consider use of GNSS for navigation to take advantage of their available capabilities. These examples highlight the importance in developing interoperable multi-GNSS capabilities to further improve existing GNSS-based capabilities available to users in HEO and beyond. For specific information on MMS and GOES-16 navigation performance see 3, 4 and 5 under Additional Resources.
Multilateral Interoperability through International Engagement
In the early 2000s, bilateral meetings were held to discuss GNSS signal interoperability. These included, among others, bilateral meetings with the U.S. and Russia on GPS/GLONASS interoperability and the U.S.-European Union on GPS/Galileo interoperability. These discussions ultimately led to a multilateral dialog in 2005 when the United Nations (UN) formed the International Committee on GNSS (ICG).
The ICG is a forum to facilitate discussion on GNSS benefits to people around the world by promoting the use of GNSS and its integration into infrastructures (particularly in developing countries) and encouraging compatibility and interoperability among GNSS and regional navigation satellite systems. It was formally established in 2005 by the UN General Assembly 61/111 resolution, and the 1st ICG meeting was held in 2006. Membership includes core GNSS and regional space-based navigation system/augmentation provider nations, as well as nations with active programs to implement or promote GNSS services and applications. The ICG also recognizes associate members and observers from organizations and associations that focus on GNSS services and applications. Also, a GNSS Provider’s Forum, which typically meets concurrently with the ICG Plenary Meetings, was established at the 2nd ICG meeting with the aim to promote greater compatibility and interoperability among current and future providers of the GNSS. Its members work to address key issues such as ensuring protection of GNSS spectrum and matters related to orbital debris and orbit de-confliction. At the 3rd meeting of the Provider’s Forum, held in 2008, it was agreed that at a minimum, all global GNSS signals and services must be compatible. Since then both ICG and Provider’s Forum meetings have played a key role in the pursuit of interoperable multi-GNSS capabilities to support space users.
To maximize the utility of GNSS for high-altitude space users, coordination among all GNSS service providers is taking place within two ICG working groups: Working Group B (WG-B) which supports “Enhancement of GNSS Performance, New Services and Capabilities” and leads SSV development, coordination, and outreach; and Working Group S (WG-S) which supports “Systems, Signals and Services” and coordinates the underlying GNSS signal interoperability. As part of the WG-B work plan, three years ago an SSV Team undertook a series of initiatives co-chaired by ESA and NASA to continue the implementation of an interoperable GNSS SSV and provide recommendations to GNSS Service. Such efforts included an independent assessment of navigation performance in HEO using combined GNSS signals. Preliminary results of these efforts were presented in the November 13, 2016 Inside GNSS article “Navigating in Space.” Since then an authoritative publicly-available SSV Booklet has been developed to detail the multi-GNSS SSV, including coordinated definitions, benefits and use cases, constellation-specific SSV signal performance data, and example technical data. The first edition of the SSV Booklet, titled “The Interoperable Global Navigation Satellite Systems Space Service Volume”, was formally presented at the 13th ICG Plenary Meeting held November 4-9, 2018 in Xi’an, China (Figure 1) and featured on television news coverage. The booklet is available in printed form at the UN Headquarters in New York, U.S., and online (for link see 8 under Additional Resources).

ICG Definition of the Space Service Volume
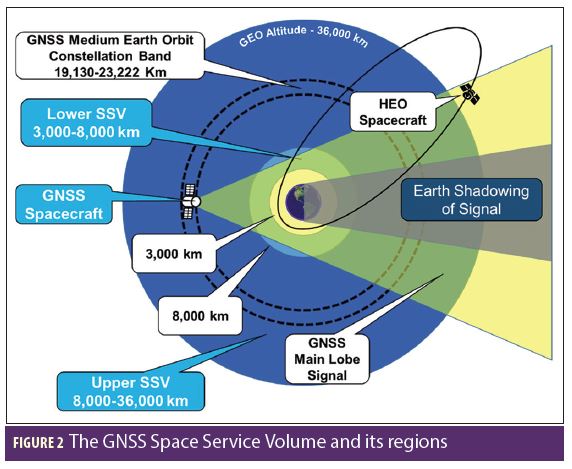
The multi-GNSS SSV has been defined as the volume of space between 3,000-kilometer and 36,000-kilometer altitudes, where terrestrial GNSS performance standards may not be applicable. GNSS service in the SSV is defined by three key parameters: pseudorange accuracy, minimum received power, and signal availability. Signal availability is the percent of time that GNSS signals are available, and is calculated both as the availability of one or four GNSS signals (depending on the metric being used). When there are less than four signals available then the employment of on-board navigation filters enable users to obtain PNT updates even with as little as one GNSS signal. A sub-metric is the Maximum Outage Duration (MOD), defined as the maximum duration when a space user in a particular orbit cannot obtain availability of at least one single signal or at least four signals. The SSV covers a large range of altitudes and the GNSS performance degrades with increasing altitude. Therefore, to allow for a more accurate reflection of these performance variations, the SSV is subdivided into two distinct regions:
• Lower SSV for Medium Earth Orbits (MEO): Covers 3,000–8,000 km altitude. It is characterized by reduced signal availability from a zenith-facing antenna alone, but increased availability if both a zenith and nadir-facing antennas are used.
• Upper SSV for GEO and HEO Orbits: Covers 8,000–36,000 km altitude. It is characterized by significantly reduced signal received power and availability because most signals travel across the limb of the Earth.
The GNSS SSV is depicted in Figure 2 along with the altitude ranges of the contributing GNSS constellations. Most GNSS satellite vehicles are located in MEO, and some are in geostationary and inclined geosynchronous orbits.
Estimated Performance of the Multi-GNSS SSV
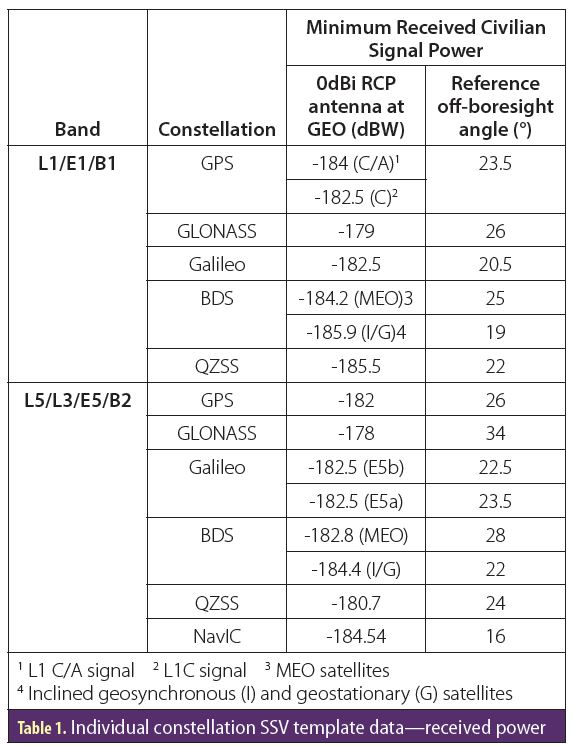
The ICG WG-B SSV Team performed an international, collaborative simulation of the GNSS single-constellation and multi-constellation performance expectations. Global and mission-specific analyses were performed to capture overall performance characteristics and representative performance for mission-specific scenarios. The focus was on signal availability, which serves as a proxy for navigation capability, and the L1 and L5 frequency bands. L2 frequency band performance is expected to be similar to that of the L5. Key methods and results are summarized here. For full details see the SSV Booklet. The constellation-specific SSV service characteristics used in the analysis were taken from Table 1 and represent the baseline service documented by individual GNSS service providers. Therefore, the results generated are intended to be conservative estimates. Actual on-orbit flight performance will differ from these estimates based on mission-specific geometry, receiver sensitivity, time-dependent service characteristics, and other factors. Also, only service provided by GNSS main-lobe signals is captured, where the boundary of this main-lobe is defined as the reference off-boresight angle.
Global Availability Analysis
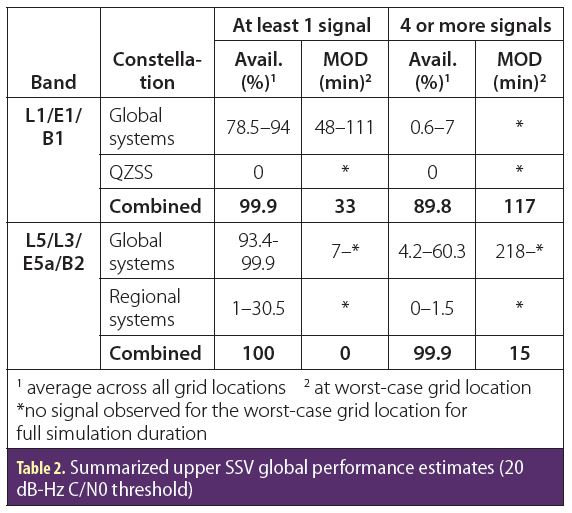
Table 2 summarizes the global availability analysis results for user spacecraft at 36,000 kilometers altitude. The full set of results for each individual constellation and for the combined multi-GNSS SSV are captured in Section 5.1 of the SSV Booklet. At a receiver threshold of 20 dB-Hz, four-signal availability at L1 for any individual constellation is very low, reaching only 7%. When the GNSS constellations are used together then four-signal availability reaches nearly 90%, thus allowing kinematic solutions throughout the SSV with less than two hours of outage. Furthermore, one-signal visibility is at 100% for L5, and nearly so for L1, indicating continuous signal coverage for ensuring continuous or near continuous navigation and timing updates via a navigation filter. These results show that the abundance of signals available in an interoperable multi-GNSS SSV greatly reduces constraints for navigation compared to using an individual GNSS.
Mission-Specific Scenarios
Mission-specific performance was calculated by simulating signal availability for a spacecraft on a particular trajectory within and beyond the SSV. The purpose was to provide “real-world” estimates for specific mission types. These provide prospective SSV users with relevant results that demonstrate the benefits and possibilities offered by an interoperable multi-GNSS SSV to specific mission classes. Three scenarios were considered: 1) geostationary orbit, 2) a highly-elliptic orbit, and 3) a lunar trajectory. Acquisition and tracking thresholds of the user receiver were both set to 20 dB-Hz in all cases. Full details on all scenarios are available in Chapter 5 of the SSV Booklet.
1. Geostationary Orbit Scenario
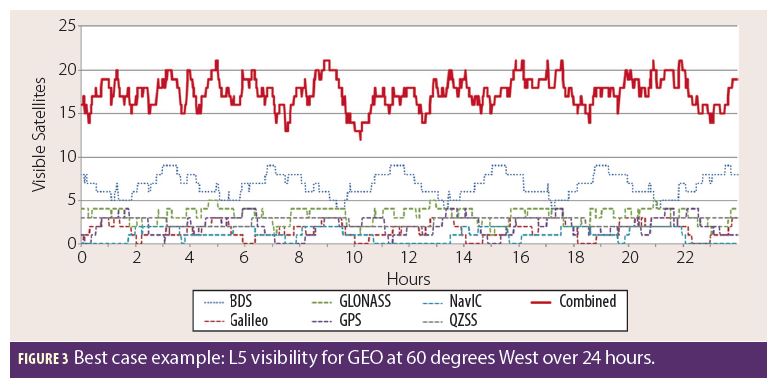
This scenario consisted of six geostationary satellites separated by 60° in longitude. The results were intended to be similar to those for the equivalent points in the global analysis, but are more representative because they were simulated using realistic user antenna patterns. Multi-GNSS visibility is highly variable depending on the user satellite location around the geostationary belt. This occurs because visibility of the inclined geosynchronous and geostationary GNSS satellites of BDS, QZSS, and NavIC are fixed by the longitude of the user spacecraft. Visibility is lowest near 180° longitude (western Pacific), and highest near 60° W (east of the U.S.). This indicates that GEO space users positioned over the western hemisphere are benefiting from the spillover of signals from the regionally-focused constellations positioned over Asia. Figure 3 shows the high case for the L5 band, in where this feature is clearly visible. Each of the MEO constellations contribute 1 to 5 satellites to the overall visibility. But because of the GEO user location, BDS, with its inclined geosynchronous and geostationary GNSS satellites, contributes up to 9 visible satellites. With all constellations combined, an average of approximately 17 satellites are visible, more than double the average contribution of any individual constellation. Even in the worst GEO location (not shown in this particular figure), an average of approximately 9 are visible at any time, more than double the highest individual contributor. In all cases, when using combined GNSS constellations it is possible to continuously form an on-board navigation solution and perform on-board real-time kinematic orbit determination.
2. Highly-Elliptical Orbit Scenario
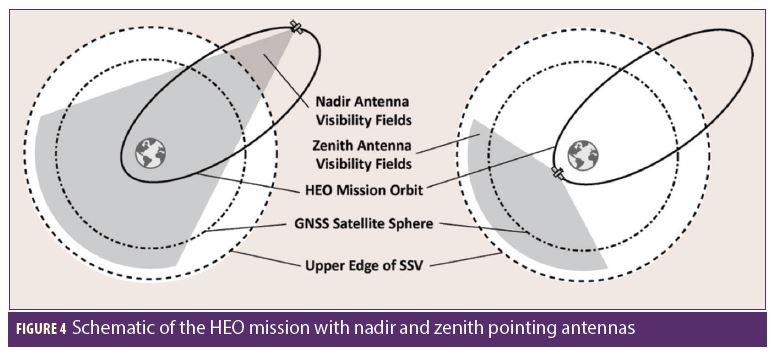
This scenario consisted of a mission in highly elliptical orbit with an apogee altitude of 58,600 kilometers and a perigee altitude of 500 kilometers. The simulated user GNSS antennas were configured in both the nadir- and zenith- facing directions. As shown in Figure 4, a high-gain, narrow beamwidth, nadir-pointing antenna ensures GNSS availability around apogee (above the GNSS constellations) while a low-gain, wide beamwidth zenith-pointing antenna provides visibility around perigee. For these results, only the best antenna (zenith or nadir) was used at a time. In a real-world case both antennas could be combined for greater availability when operating below the GNSS satellites.
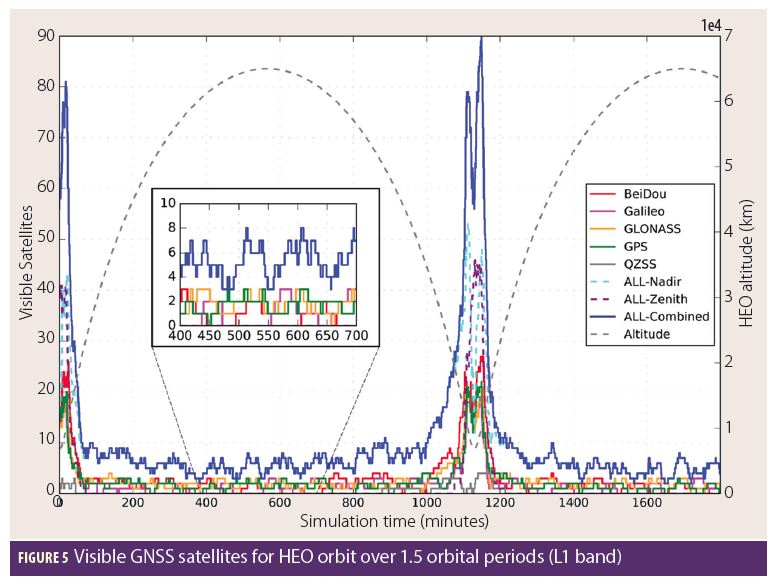
Figure 5 shows how GNSS signal availability varies over 1.5 orbital periods for the L1 band. For both L1 and L5, 74% to 99% single-signal availability is provided by individual constellations (even at apogee), but fully 100% is provided when all GNSS constellations are used. Four-signal availability at apogee remains mainly below 20% individually, but is nearly 100% when used together, with maximum outages of less than one hour. L5 availability is better compared to L1, with 100% availability and no outages because of wider beamwidths, slightly higher minimum received power values, and the addition of NavIC.
3. Lunar Mission Scenario
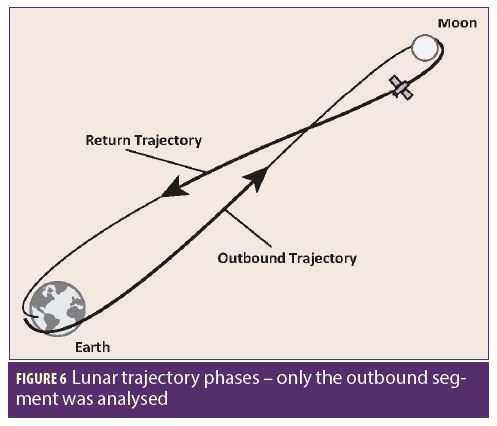
A lunar scenario was considered in order to explore the boundary of the GNSS SSV beyond Earth orbit. A lunar trajectory from LEO to a lunar fly-by with a return to Earth was simulated (Figure 6). Only the outbound portion was used in this analysis. As with the HEO case, both the zenith-pointing and nadir-pointing user antennas were modelled, with peak gains of 4.5 dBi and 9 dBi, respectively. The spacecraft attitude was kept nadir-pointing.
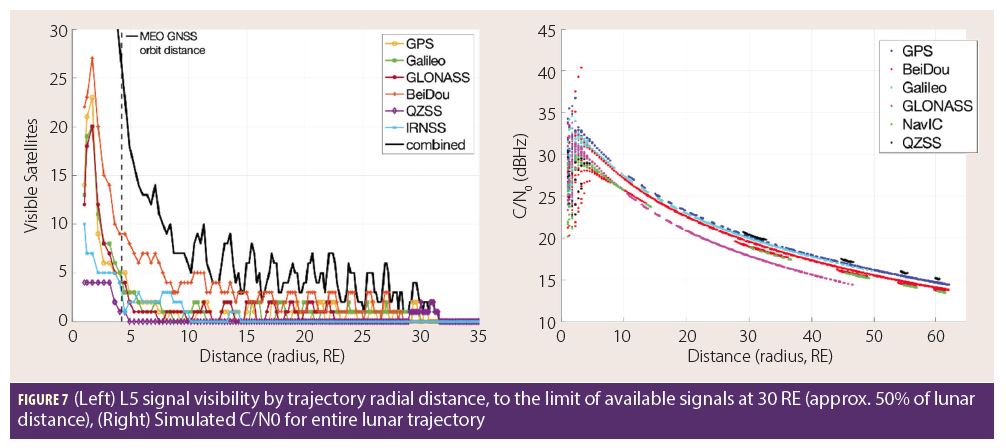
Figure 7 (Left) shows the general structure of the GNSS signal availability, using the L5 band as an example to capture the contributions of all constellations. Availability is highly dependent on distance from Earth, and user receiver equipment assumptions for the C/N0 tracking threshold and the user antenna gain. As the distance from Earth increases the availability drops quickly and reaches zero beyond 30 RE, which is approximately 50% of the distance to the Moon. When using all constellations combined the single-satellite availability is nearly 100% to a distance of approximately 30 RE, and zero thereafter. The benefit of the combined multi-GNSS case is best seen above 10 RE, where signal availability is consistently higher than any individual constellation, and often nearly double. Notably, combining constellations does not increase the altitude at which such signals are available; rather, it increases the number of signals available at a given altitude. These results show that navigation with the combined multi-GNSS SSV is feasible for nearly half the duration of a lunar outbound trajectory, well beyond the upper limit of the SSV, and is possibly a solution for navigation for the outbound trans-lunar injection maneuver and return trajectory correction maneuvers.
Figure 7 (Right) shows the simulated C/N0 received by the example spacecraft for each individual GNSS constellation and the entire trajectory to lunar distance (60 RE). It shows the reason for the availability drop-off near 30 RE shown in the Figure 7 (Left). The C/N0 of GNSS signals at the user antenna drops below the 20 dB-Hz minimum threshold beyond 30 RE. If a moderately more sensitive receiver or higher-gain antenna were employed then signal availability would be achievable up to the lunar distance. A simple improvement in antenna gain has been proposed to support lunar vicinity missions such as Gateway.
Conclusions
Many emerging space missions are poised to benefit from precision navigation and timing afforded through the employment of GNSS signals in the SSV. Currently, several operational missions already use single constellation GNSS in and above the SSV to improve their vehicle navigation performance, most notably the GOES weather satellites at GEO and the MMS four-spacecraft formation flying mission at altitudes up to 150,000 kilometers, which is more than 40% of the distance between the Earth and the Moon. Future spacecraft users at these altitudes and beyond can benefit from the improved performance afforded by an interoperable multi-GNSS capability.
The multi-GNSS SSV promises to be transformative in the operation of high-altitude spacecraft when compared to the use of a single constellation alone. Multi-GNSS benefits include increased signal availability, increased geometric diversity, increased responsiveness, less reliance on expensive clocks, vehicle autonomy enhancements due to reduced signal outages, and increased resiliency due to the diversity of signals and constellations used. These benefits are truly enabling for classes of emerging advanced users, including ultra-stable remote sensing from geostationary orbit, agile and responsive formation flying, more efficient utilization of valuable slots in the GEO belt and lunar missions.
The UN ICG WG-B has worked in a collaborative fashion to establish an interoperable multi-GNSS SSV where all GNSS constellations and regional navigation systems can be utilized together to improve mission performance. This effort has resulted in an internationally-agreed definition of the multi-GNSS SSV and captures the SSV performance contributions of each individual GNSS constellation. In addition, internationally validated simulations show the performance benefits of the combined systems for several reference mission scenarios. This information is documented in a publicly-available UN published booklet that will help high altitude space mission designers employ multi-GNSS navigation and timing capabilities. The development of the multi-GNSS SSV is truly an international cooperative effort by all GNSS providers. The contributions of the experts that have developed this technology will enable untold space missions that will extend humanity’s reach for the stars, its understanding of the planet Earth, and its critical protection of people and property.
The UN SSV Booklet presented at ICG-13 represents a key milestone towards the development of an interoperable multi-GNSS SSV, and will be updated through future editions as new information and analyses become available.
Acknowledgements
The authors express their sincere thanks to everyone that has supported activities leading towards the development GNSS capabilities to support space users in HEO and beyond. Special recognition also goes to the GNSS and regional navigation system providers including the: U.S. Air Force GPS Directorate, Europe’s Galileo Team, Russia’s GLONASS team, China’s BeiDou team, Japan’s QZSS team, and India’s NavIC team. Also instrumental in the multi-GNSS SSV development were the leaders and international delegates from the UN International Committee on GNSS, including the ICG Secretariat Ms. Sharafat Gadimova and the relevant ICG working groups. In particular, the WG-B leads and SSV subject matter experts, as acknowledged in Annex F of the SSV booklet, that are transforming the multi-GNSS SSV from vision to reality.
Additional Resources
(1) Miller, James J., Bauer, Frank H., Oria, A.J., Pace, Scott, Parker, Joel J.K., “Achieving GNSS Compatibility and Interoperability to Support Space Users,” Proceedings of the 29th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, Oregon, September 2016, pp. 3622-3634.
(2) “Navigating in Space,” Inside GNSS, November 13, 2016. https://insidegnss.com/navigating-in-space/
(3) Chapel, J., Stancliffe, D., Bevacqua, T., Winkler, S., Clapp, B., Rood, T., Freesland, D., Reth, A., Early, D., Walsh, T., Krimchansky, A., “In-Flight Guidance, Navigation, and Control Performance Results for the GOES-16 Spacecraft,” GNC 2017: 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, May 2017.
(4) Concha, M., Zanon, D., and Gillette, J., “Performance Characterization of GOES-R On-Orbit GPS Based Navigation Solution,” AAS Guidance and Control Conference 2017, Feb 2017, Breckenridge, CO, AAS Paper 17-138.
(5) Winkler, A., Ramsey, G., Frey, C., Chapel, J., Chu, D., Freesland, D., Krimchansky, A., Concha, M., “GPS Receiver On-Orbit Performance for the GOES-R Spacecraft,” GNC 2017: 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, May 2017.
(6) Enderle, Werner, Gini, Francesco, Boomkamp, Henno, Parker, Joel J.K., Ashman, Benjamin W., Welch, Bryan W., Koch, Mick, Sands, O. Scott, “Space User Visibility Benefits of the Multi-GNSS Space Service Volume: An Internationally-Coordinated, Global and Mission-Specific Analysis,” Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, Florida, September 2018, pp. 1191-1207.
(7) Parker, Joel J. K., Bauer, Frank H., Ashman, Benjamin W., Miller, James J., Enderle, Werner, Blonski, Daniel, “Development of an Interoperable GNSS Space Service Volume,” Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, Florida, September 2018, pp. 1246-1256.
(8) “The Interoperable Global Navigation Satellite Systems Space Service Volume,” United Nations Office for Outer Space Affairs, November 30, 2018. http://www.unoosa.org/res/oosadoc/data/documents/2018/stspace/stspace75_0_html/st_space_75E.pdf
Author
James J. Miller is Deputy Director of Policy & Strategic Communications within the Space Communications and Navigation Program at the NASA Headquarters. His duties include advising NASA leadership on Positioning, Navigation, and Timing (PNT) policy and technology, and is also the Executive Director of the National Space-based PNT Advisory Board.
Co-Authors / Contributors
Benjamin W. Ashman is an Aerospace Engineer at the NASA Goddard Space Flight Center, where he supports numerous space communication and navigation efforts, most recently as part of the OSIRIS-REx navigation team. His research has primarily been focused on space applications of GPS since starting at the agency in 2015.
Frank H. Bauer supports NASA with expertise in spacecraft systems engineering, Guidance Navigation and Control (GN&C), space-borne GNSS, and spacecraft formation flying. He previously served as NASA’s Chief Engineer for Human Spaceflight Exploration beyond low Earth Orbit and as Chief of the GN&C Division at NASA’s Goddard Space Flight Center.
Daniel Blonski is Navigation System Performance Engineer at the European Space Research and Technology Centre of the European Space Agency in Noordwijk, Netherlands, where he is contributing to the development of the European Navigation Systems as a member of the ESA Directorate of Navigation.
Madeleine Bronstein is a Systems Analyst at Overlook Systems Technologies, Inc. supporting the NASA Space Communications and Navigation (SCaN) Program Office. Ms. Bronstein is the Secretariat of the Interagency Operations Advisory Group (IOAG) and supports outreach for navigation policy and space communications activities.
Jennifer E. Donaldson is an Aerospace Engineer in the Components and Hardware Systems Branch at NASA Goddard Space Flight Center, where she is involved in numerous projects related to GPS, GNSS, and spacecraft navigation.
Werner Enderle is the Head of the Navigation Support Office at ESA’s European Space Operations Center (ESOC) in Darmstadt, Germany. Previously, he worked at the European GNSS Authority (GSA) as the Head of System Evolutions for Galileo and EGNOS and he also worked for the European Commission in the Galileo Unit. Since more than 20 years, he is involved in activities related to the use of GPS/GNSS for space applications. He holds a doctoral degree in aerospace engineering from the Technical University of Berlin, Germany.
A. J. Oria is an Aerospace Engineer at Overlook Systems Technologies, Inc. and Program Manager for NASA Support. Dr. Oria joined Overlook in 1998 and since 2003 has been providing GPS, navigation policy, and engineering subject matter expertise in support of PNT activities at the Space Communications and Navigation (SCaN) Program Office.
Joel J. K. Parker is the Positioning, Navigation, and Timing (PNT) Policy lead at NASA Goddard Space Flight Center, where he develops and promotes civil space use of GNSS on behalf of NASA Space Communications and Navigation (SCaN). He has worked as an Aerospace Engineer at NASA since 2010.
O. Scott Sands has been a Communications System Analyst at NASA, Glenn Research Center since 2000 where he develops space navigation, sensing and communications systems. Scott currently leads Position Navigation and Timing Policy related activities at GRC in support of the NASA’s Space Communications and Navigation (SCaN) Program Office.




