The complex and mission-critical needs of the autonomous vehicle market demand innovation at higher levels in several different sensors and in sensor integration. A new photonic chip technology offers promise in providing high-volume, low-cost manufacture of high-end, tactical-grade performance fiber-optic gyros (FOGs)for inertial navigation in GNSS-obstructed environments.
This technology, its technical underpinnings and demonstrated use cases are the subject of a free webinar, “Inertial Breakthroughs for the Autonomous Vehicle,” on Wednesday, November 20, 2019 from 1:00 PM – 2:30 PM Eastern time. The webinar is sponsored by KVH, Inside GNSS and Inside Unmanned Systems magazine.
Registration is now open here.
With an opening section covering inertial performance and error characteristics, a core presentation on this new inertial chip technology, and a concluding segment demonstrating the advanced functionality of an autonomous vehicle employing this technology, the in-depth technical presentation will bare valuable information and insight for all those interested in autonomous navigation.
The discussion includes:
- an overview of inertial performance and error characteristics and a brief treatment of how external sensors are used to aid the inertial system. This lays the foundation upon which the following two speakers discuss and dissect high-performance inertial sensors and their applications.
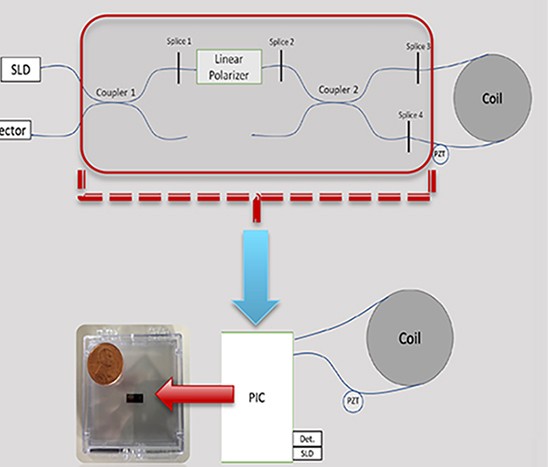
- a description of how several passive functional FOG components are integrated onto a photonic chip, including low-loss couplers used for a ring interferometer and for a source/detector transceiver, high propagation extinction ratio (PER) polarizer, high-efficient fiber-connection mode size converters, and features to eliminate stray light. This technology provides spatial orientation data enabling geolocation at centimeter-level accuracy while reducing the cost, size, and weight of the gyros and the resulting IMU. These have been tested by select autonomous vehicle developers and show consistent, reliable, cost-efficient performance in angle random walk (ARW) and bias instability, two of the most important performance parameters for safety in autonomous vehicles.
- use cases of advanced inertial navigation in on-road autonomy, displaying patented systems, licensed to a variety of OEMs, that follow the rules of the road. The equipped vehicles provide autonomous shuttle services in a variety of locations and have also been deployed by US forces after receiving Army Test and Evaluation Committee (ATEC) approval for operational use. The on-road autonomy libraries include functionality for following roads, passing vehicles, rerouting when occlusions are found and all rules of the roads as defined by the human driving manuals.
Our expert panel:
Michael Braasch is the Thomas Professor of Engineering in the School of Electrical Engineering and Computer Science at Ohio University. He is a Principal Investigator with the Avionics Engineering Center at Ohio University and has been performing navigation system research for the past 34 years. Mike has taught inertial navigation short courses at Honeywell, Kearfott and Northrop Grumman and is currently serving on the GNSS/Inertial working group (WG-2C) in RTCA Special Committee 159. He is a Fellow of the U.S. Institute of Navigation, serves on the Board of Governors of the IEEE Aerospace and Electronic Systems Society and is an instrument-rated commercial pilot.
Jan Khan, Principal Optical Design Engineer at KVH Industries Inertial Navigation. He is responsible for the research and development of fiber based and photonic based inertial sensors. Jan has been involved in the research and development of fiber optic gyroscopes for over 8 years and holds numerous patents in the field. Jan received his Ph.D. from the University of Connecticut in Nanotechnology and is an active member of the AIM Photonics Integrated Photonic Systems Roadmap (IPSR) sensors division.
Ray Wilhelm is an engineer at Robotic Research, LLC., a provider of autonomy and robotic technologies to government and commercial customers.
Moderator: Alan Cameron, editor-in-chief of Inside GNSS magazine and PNT editor for Inside Unmanned Systems magazine. He has covered the GPS/GNSS, PNT and UAS/UAV industries and research communities as a writer and magazine editor since 2000, focusing on technical issues around continuous, reliable positioning and navigation.




