
Through a series of four vehicle experiments leveraging low-cost GNSS/IMU sensors, the findings from this research indicate that low-cost HAS PPP solutions can yield results comparable to those obtained using CNES ultra-rapid products at the 68th percentile of errors.
DING YI AND SUNIL BISNATH YORK UNIVERSITY, CANADA
NACER NACIRI JPL, USA
F. JAVIER DE BLAS EUSPA, EUROPEAN UNION
ROBERTO CAPUA SOGEI SPA, ITALY
In January 2023, EUSPA officially announced the Galileo High Accuracy Service (HAS) reached initial service through the E6B signal [1]. With the availability of HAS data, users worldwide can retrieve precise GPS+Galileo orbit and clock corrections, as well as satellite code biases in real-time and for free with 24/7 operated service delivery and committed performance levels. This trend has further boosted the development of GNSS receivers and mass-market applications, such as Intelligent Transportation Systems (ITS), precise agriculture and mobile mapping [2]. While there has been a growing interest in assessing the performance of Galileo HAS in Precise Point Positioning (PPP) processing mode for civil applications, there has yet to be an investigation into the use of low-cost sensor data with HAS corrections in urban driving environments. The objective of this study is to evaluate the performance of Galileo HAS PPP in real-world driving conditions using low-cost GNSS and IMU sensors.
Rapid technological advancement
In the pursuit of accurate positioning, two advanced satellite positioning techniques have gained widespread adoption in mass-market applications: PPP and Real-Time Kinematic (RTK). Unlike RTK, which relies on Observation Space Representation (OSR) messages, PPP uses State Space Representation (SSR) data to achieve performance similar to RTK [3,4]. For this study, these SSR messages are sourced from the International GNSS Service (IGS) Analysis Centers (ACs), which provide precise satellite orbit and clock products. Additionally, the IGS has introduced Real-Time Service (RTS) to disseminate SSR corrections, which are provided in the RTCM-3 format and can be accessed through Networked Transport of RTCM via Internet Protocol (NTRIP). PPP, compared to RTK, demands a longer time to achieve centimeter-level accuracy due to its inability to eliminate certain GNSS errors, such as receiver clock errors and atmospheric delays. However, PPP offers distinct advantages, notably the absence of the establishment of local reference stations and the ability to provide continuous, high-quality Positioning, Navigation and Timing (PNT) services without being limited by baseline length.
Instead of broadcasting corrections through the Internet, a recent development in positioning communities has witnessed the emergence of the direct broadcast of SSR corrections via GNSS constellations. As a pioneer in providing GNSS augmentation services, Japan’s Quasi-Zenith Satellite System Centimeter-Level Augmentation Service (QZSS CLAS) is notable for being the first augmentation system to transmit Compact SSR (CSSR) corrections through the L6D signal in 2020, aiming to provide satellite orbit, clock, code/phase biases, and ionospheric/tropospheric corrections to GPS, Galileo and QZSS satellites across Japan [5,6]. To extend the service area for the entire Asia-Oceania region, the Japan Aerospace Exploration Agency (JAXA) introduced the Multi-GNSS Advanced Orbit and Clock Augmentation (MADOCA) system. In 2022, MADOCA initiated its PPP trail service to disseminate satellite orbit, clock, code/phase corrections for GPS, Galileo, GLONASS, BDS and QZSS satellites through the L6E signal [7]. Similarly, BDS-3 (BeiDou-3) offers customized CSSR corrections, including GPS + BDS satellite orbit/clock corrections and code biases through the B2b signal, all geared toward achieving high PPP performance for users in China and the surrounding regions [8,9]. More recently, an open Python toolkit CSSRlib has been created to leverage SSR corrections from multiple free services, allowing for a straightforward comparison and use of different augmented PPP services [10].
In contrast to regional services, the European Union is actively progressing in the development of the Galileo High Accuracy Service (HAS). Galileo HAS is expected to play a pioneering role by offering free Signal-in-Space (SIS) corrections to users worldwide. Unlike other PPP services that rely on denser reference station networks, current HAS corrections are generated by 15 Galileo Sensors Stations (GSS) and related infrastructure, and they are broadcasted within the Galileo C/NAV navigation message through the E6B signal at 1278.75 MHz [11]. As of January 2023, Galileo HAS initial service has been declared operational, and these corrections have been accessible both through Galileo E6-B signals and HAS Internet Data Distribution (IDD) service [1].
The official announcement of operational deployment of the Galileo HAS initial service has sparked significant interest in the global navigation and positioning community for exploring the potential applications of HAS PPP in civil applications. In early trials, several studies investigated HAS corrections accuracy through signal-in-space range error (SISRE) and differential code bias (DCB) differences [12, 13]. More recently, [14] provides insight into the capabilities of live HAS test signals in 2022. It was observed that these signals could deliver Galileo and GPS orbit and clock corrections with SISRE values of 10.6 cm and 11.8 cm, respectively. [14, 15] also demonstrated that GPS+Galileo HAS PPP solutions can provide real-time 95th percentile positioning performance (2-sigma) of better than 20 cm and 40 cm for cadastral surveying in the horizontal and vertical domains, respectively. Meanwhile, the maturity of GNSS and its associated augmentation services has catalyzed unprecedented growth and evolution of low-cost, multi-frequency, multi-constellation GNSS receivers and antennas.
This surge in technological advancement has given rise to cost-effective GNSS/IMU sensor integration, which has received considerable attention within the Location-Based Services (LBS) communities [16, 17, 18]. Although progress has been made, there has been no publications of quantitative investigations of low-cost sensors HAS solutions in realistic driving scenarios. Therefore, the main contributions and novelties of this study are to answer the following questions: 1) Compared to the analysis in 2022, how do recent HAS corrections perform in terms of data availability, SISRE and DCB differences? 2) Regarding PPP performance in real-world driving environments, how comparable are HAS broadcasted corrections to CNES ultra-rapid products? 3) With the inclusion of low-cost IMU measurements, how do HAS low-cost tightly-coupled GNSS/IMU integrated solutions behave under different driving conditions?
To address the proposed questions, this article first describes the HAS corrections and the processing methodology for the HAS PPP engine. The next section depicts the experimental setup and assesses the HAS corrections in July 2023, followed by corresponding positioning performance and analysis.
HAS Corrections Description
Aligned with the targets proposed by the European Commission (EC), Galileo HAS Service Level 1 (SL1) has a primary goal of providing global GPS + Galileo satellite orbit, clock and biases corrections, conveyed at a data rate of 448 bits per second and structured in a format similar to CSSR. The aim is to facilitate PPP-based horizontal and vertical accuracies better than 20 cm and 40 cm, respectively, with a convergence time of 300 seconds and 99% data availability. Furthermore, Galileo HAS Service Level 2 (SL2) is designed to extend the offerings by providing atmospheric corrections to users within the European Coverage Area (ECA). This expansion makes so-called “PPP-RTK” feasible, potentially reducing the convergence time to less than 100 seconds. The full operational deployment of Galileo HAS is scheduled for the coming two to three years, promising further advancements in satellite-based positioning accuracy and capabilities [2].
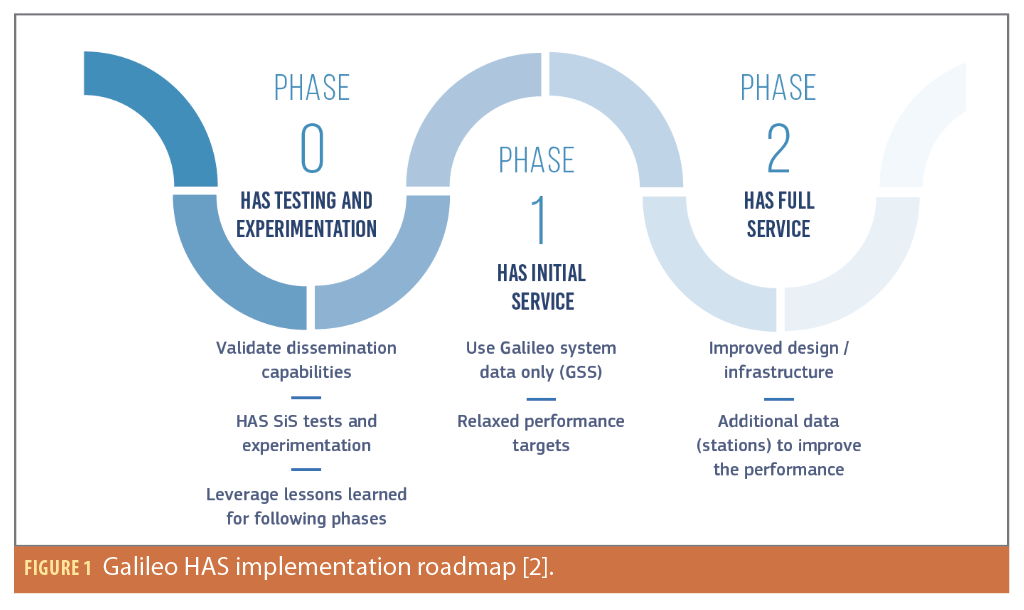
As outlined in the Galileo HAS information note, the implementation of Galileo HAS is organized into three phases, as depicted in Figure 1 [2]. Phase 0 involved the successful completion of HA testing and experimentation activities between 2019 and 2022, validating Galileo’s dissemination capabilities. Phase 1, referred to as HA Initial Service, was designed to provide an SL1 service with reduced performance. This phase officially began in January 2023. HAS implementation will then advance to Phase 2, achieving full implementation of Galileo HAS and meeting performance objectives of SL1 and SL2. Current improvements being focused on include additional reference stations and the introduction of Galileo and GPS satellite phase bias corrections, which will allow for faster and more accurate PPP-AR (PPP with carrier-phase ambiguity resolution) on the part of users.
According to the Galileo HAS Interface Control Document (ICD) [19] the constituent elements of HAS corrections involve 1) Satellite orbit corrections to the broadcast ephemerides; 2) Satellite clock corrections to the broadcast ephemerides; 3) Satellite biases. It’s important to note that, as of the information available in the ICD, satellite phase biases are still under development and are not accessible to users at this time. The HAS user reference algorithm (that will be made available for free to any interested party), will ease the accessibility to this service worldwide.
HAS Orbit Corrections
The HAS service provides orbit corrections for GPS and Galileo satellites in the Satellite Coordinate System (SCS), comprising radial, along-track, and cross-track (RAC) components. These corrections are associated with the ionosphere-free antenna phase center (APC) of the satellite, specifically for GPS LNAV and Galileo I/NAV messages.
In general, HAS orbit corrections cover a range of ±10.2375 m, ±16.376 m, and ±16.376 m for the respective RAC directions, with updates occurring at 50-second intervals and a validity period of 300 seconds. Equation 1 illustrates the relationship between the HAS corrected satellite positions and corresponding corrections δRs.

where xs denotes the broadcast satellite position, and stands for the rotation matrix employed to transform the corrections from the RAC system into the designated Earth-Centered Earth-Fixed (ECEF) frame. As post-processing products from ACs are based on the center of mass (CoM), there is a viable option to convert the APC-based HAS orbits to CoM-based orbits by applying the ionospheric-free phase centre offsets (PCO) corrections sourced from the supplementary ANTEX files:

HAS Clock Corrections
As with the HAS orbit corrections, HAS clock corrections refer to the ionospheric-free combination of the GPS LNAV signals (L1 C/A and L2P) and Galileo I/NAV signals (E1 and E5b). For each satellite, the HAS corrections denoted as δCs, are computed from the Delta Clock Correction (DCC) and Delta Clock Multiplier (DCM), falling within a range of ±40.95 m, with a 10-second update interval and a 60-second validity period. Prior to being incorporated into the ionospheric-free broadcast navigation clock errors dts, it’s essential to consider the relativistic correction for Galileo satellites. Equation 3 depicts the expression for HAS clock errors:

where and dts are the corrected clock error and broadcast clock error for Galileo satellites, and c is the speed of light.
HAS Satellite Code Biases
Aside from orbit and clock corrections, HAS encompasses support for satellite code biases corrections that are applied to GPS on L1 C/A, L2C, and L2P signals and Galileo on E1 C, E5A Q, and E5B Q signals. Unlike the satellite Differential Signal Bias (DSB) products, HAS code biases are disseminated in the format of Observable-specific Signal Biases (OSBs). These code corrections are framed as pseudo-absolute biases, enabling the direct application to the corresponding pseudorange measurements for users. The range of these biases spans ±20.46 m, with a 50-second update interval and a 60-minute validity period. An example of the conversion between DSB and OSB corrections is shown as:

where are the DSB of the Galileo C1C and C5Q code observations, while
and
are the OSB of the Galileo C1C and C5Q, respectively.
Methodology and Processing Architecture
This section begins with the basic mathematical methodologies used for the PPP/IMU tightly-coupled integration, followed by the processing architecture of the York University HAS PPP processing engine.
PPP and Tightly-Coupled Methodology
The dual-frequency observations from both GPS (L1/L2) and Galileo (E1/E5b) signals are employed for PPP processing, and the uncombined PPP (UPPP) model is expressed as:

where the pseudorange and carrier-phase measurements on frequency i (i∈{1,2}) are denoted as P and Φ, respectively; is the geometric range between satellite s and receiver r; dtr and dts represent the receiver and satellite clock offset, and c is the speed of light; fi refers to the signal frequency on i, and I and T stand for slant ionospheric delay and slant tropospheric delay, respectively; bP and bΦ are the code and phase biases, respectively. N is the unknown ambiguity in cycles and λ is the carrier wavelength; εP and εΦ are pseudorange and phase noise, respectively. In the HAS PPP processing, satellite clock offset (dts) and satellite code biases (
) are provided by HAS corrections.
Incorporating IMU sensor integration, this research uses the tightly-coupled method that integrates the GNSS pseudorange and carrier- phase raw measurements together with IMU measurements into the extended Kalman filter. After iterations and passing the sanity check, the variables from GNSS and IMU can be estimated as:

where δRx,y,z and δVx,y,z denote the position and velocity errors in ECEF coordinate system, respectively; δTrs stands for the zenith tropospheric delay, which is converted into slant delay with corresponding mapping function. δAx,y,z refers to the attitude errors in the local navigation system, and bax,ay,az and bgx,gy,gz are the accelerometer and gyroscope biases, respectively.
York HAS Processing Engine
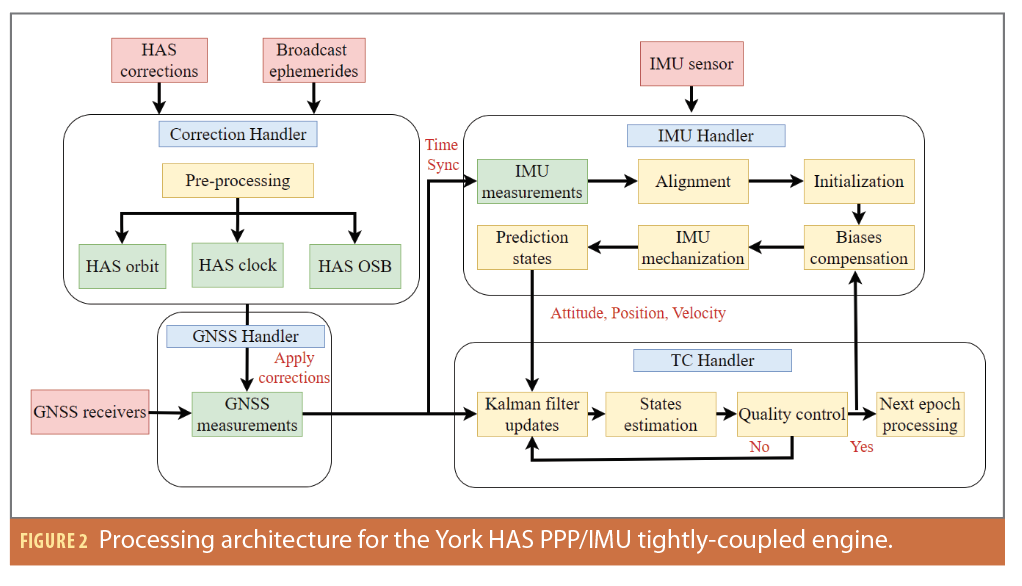
Figure 2 depicts the processing architecture for the York HAS engine. The HAS corrections and broadcast ephemeris are initially introduced and processed in the Correction Handler module of the code. Subsequently, the calculated HAS orbit, clock and code OSB corrections are directed to the GNSS Handler module. After applying the HAS corrections, the GNSS handler and IMU Handlers acquire and synchronize the raw measurements. The IMU Handler is responsible for aligning IMU raw measurements, initialization and compensating for biases estimated from the previous epoch. Subsequently, the predicted states encompassing attitude, positioning and velocity are conveyed to the TC (tightly-coupled) Handler module. In conjunction with the GNSS measurements, the TC handler undertakes the integration of GNSS and IMU data through the Extended Kalman filter processing engine, with the objective of estimating the unbiased states as shown in Equation 6. Following the quality control and sanity assessments, the York HAS engine advances to the subsequent epoch for processing.
Experimental Setup and HAS Assessment
To investigate the HAS corrections and our proposed algorithms, multiple vehicle experiments were carried out in realistic driving environments. This section introduces the corresponding experimental setup and HAS assessment.
Measurement Campaign
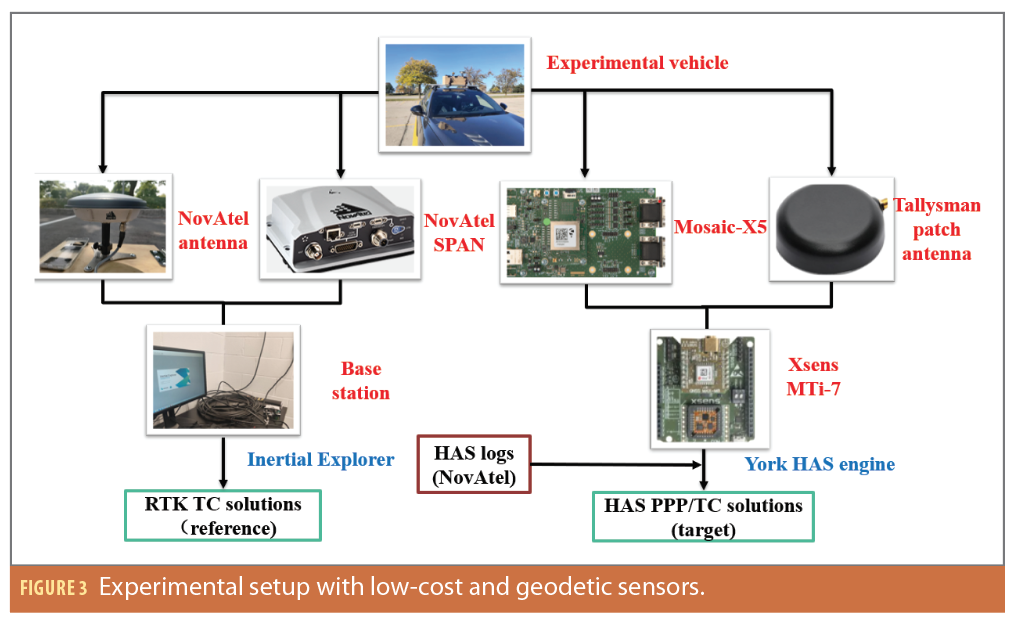
To evaluate the effectiveness of HAS corrections and the performance of the York PPP engine, a series of vehicular experiments were conducted in the vicinity of York University, Toronto, Canada. The experimental configuration, depicted in Figure 3, consists of two data collection setups: 1) The geodetic collection employs a NovAtel SPAN (comprising an OEM7 GNSS receiver and Epson IMU) integrated with a NovAtel antenna. 2) The low-cost collection equipment comprises a Septentrio Mosaic-X5 receiver paired with a Tallysman patch antenna. Furthermore, an automotive-grade Xsens MTi-7 IMU is affixed on top of the experiment vehicle. The HAS log files, decoded by NovAtel, are used as input data for the York PPP engine to generate HAS PPP/TC solutions. Additionally, a base station using a NovAtel OEM7 receiver and a geodetic-grade antenna is mounted on an open rooftop within a 5 km baseline length to provide the reference trajectory processed by the NovAtel Inertial Explorer software.
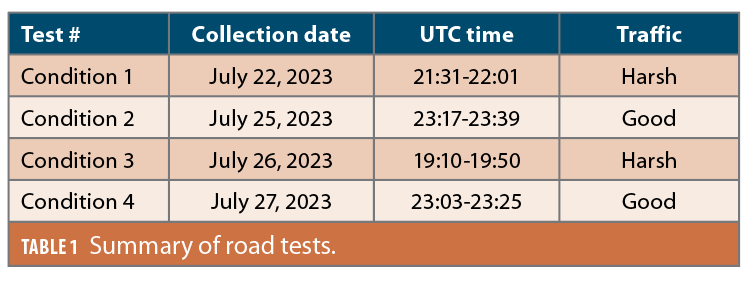
To simulate daily driving environments, four kinematic tests were conducted on different days with a similar route and different multipath profiles. Table 1 highlights the corresponding details of the four vehicle experiments, including test identifiers, collection dates, UTC timestamps, and traffic conditions. Note the traffic conditions fluctuated at different local times, primarily due to variations in traffic volume and traffic density.
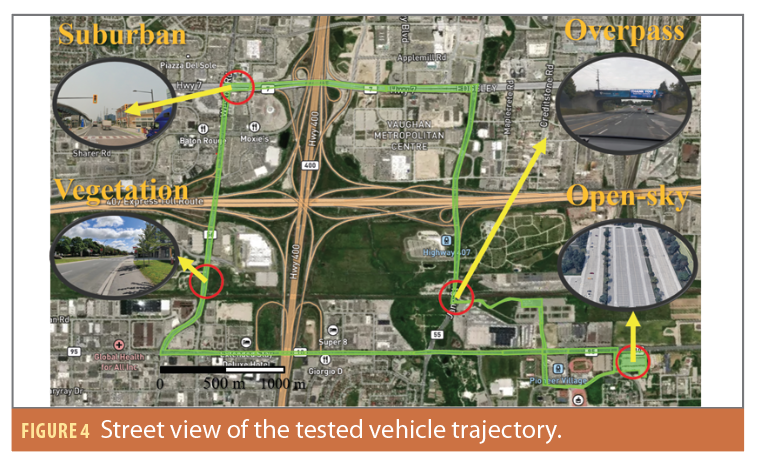
Figure 4 shows an aerial street view of the vehicle experiment, which includes multiple multipath profiles like open-sky parking lots, vegetation roads, suburban roads, as well as overpasses. It is anticipated that the GNSS-only positioning solution would experience a significant degradation when the vehicle passes under an overpass due to the limited number of observations. This signal block is the rationale for integrating a low-cost IMU into the navigation solution to enhance robustness and overall positioning performance.

Assessment of HAS Corrections
To evaluate the HAS corrections, a comparative analysis is performed across various criteria, including data availability, Signal-in-Space Range Error (SISRE) and DCB differences. The decoded ASCII HAS files used in this study were provided by Hexagon | NovAtel, a member of the GISCAD- OV project team (giscad-ov.eu).
Data Availability
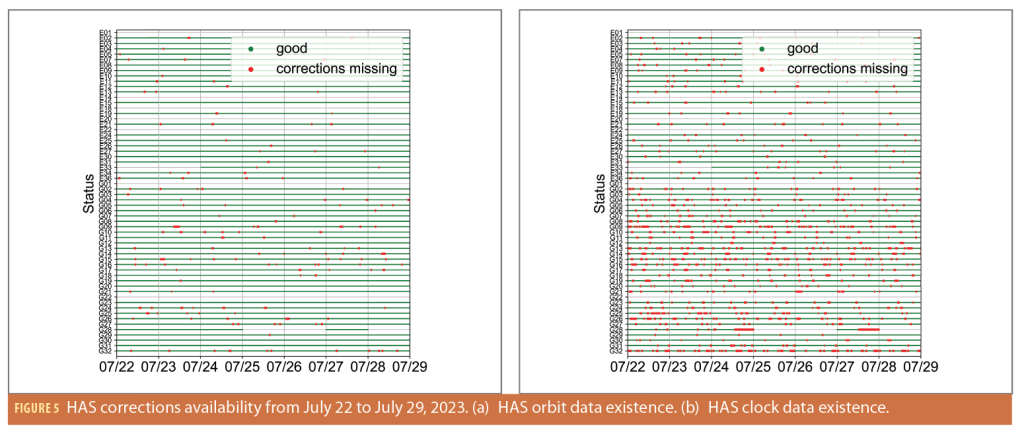
The results presented focus on the assessment of HAS corrections data availability over a one-week period, from July 22 to July 29, 2023. Considering the HAS orbit and clock corrections are provided with distinct timestamps, their availability is initially examined separately. As shown in Figure 5, green regions denote the presence of corrections accessible to users, while red dots represent instances where HAS corrections were unavailable during those time intervals. Note these results exclusively account for the existence of corrections, without taking into account their validity periods. Both Galileo and GPS exhibit a high degree of HAS orbit availability, with Galileo achieving close to 100% availability, and GPS at ~98%. In contrast, HAS clock availability is somewhat lower, with Galileo achieving 99% availability and GPS satellites attaining 92% availability.
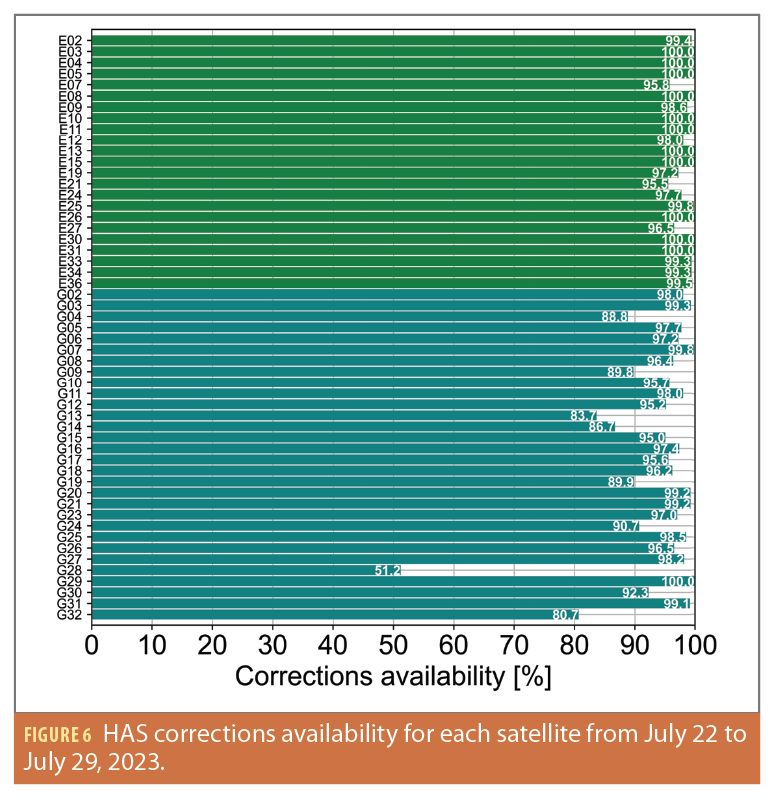
Both orbit and clock corrections are integral components of PPP processing, so it is important to consider them not only in terms of data availability, but also in regard to their respective validity periods. Figure 6 illustrates satellite-specific data availability, and the analysis reveals that, on average, Galileo and GPS satellites can achieve data availability rates of 99% and 92%, respectively. These figures represent an improvement over last year’s performance, where Galileo attained 97% availability, and GPS achieved 91% [14].
Orbit and Clock SISRE Analysis
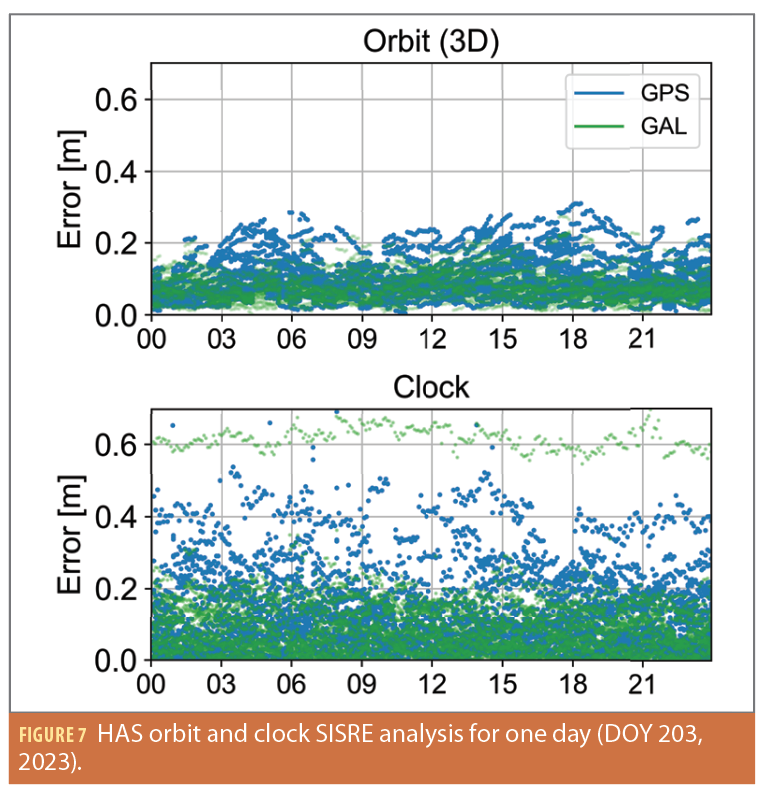
In the SISRE analysis, a direct comparison is conducted between HAS orbit and clock corrections and the final orbit and clock products provided by the Center for Orbit Determination in Europe (CODE), recognized for its high-quality products. And the detailed SISRE computation equations can be referred to in paper by [20]. Similar to the data availability analysis, the datasets gathered from July 22 to July 29, 2023, are analyzed. Figure 7 shows the SISRE results for HAS orbit 3D and clock corrections specifically on July 22. GPS and Galileo satellites are represented in blue and green dots, respectively.
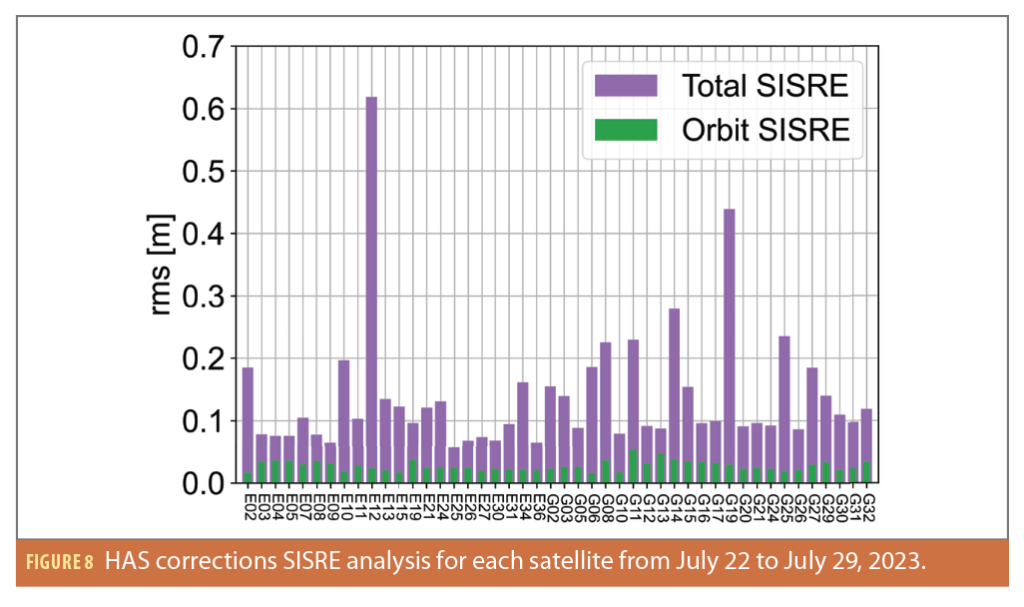
Figure 8 presents an overview of the average orbital SISRE (represented in green) and total SISRE (represented in purple) for both Galileo and GPS satellites over one week. Owing to unexpected larger errors, G07, G09 and E33 satellites have been excluded from the computation and deserve further investigation. Additionally, Table 2 highlights the overall statistics, indicating HAS is capable of providing orbital and clock corrections with SISRE values of approximately 11 cm and 16 cm, respectively. These accuracy levels are consistent with those observed in 2022 [14].
OSB Analysis
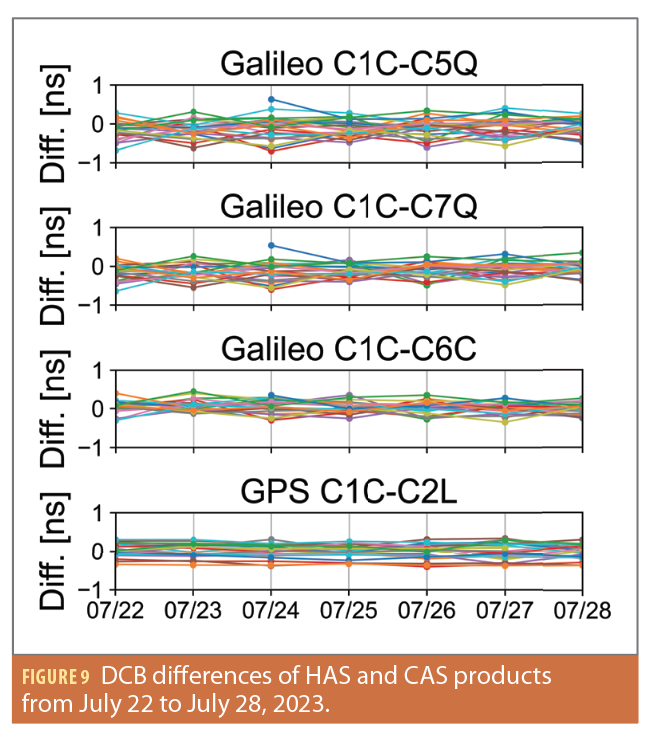
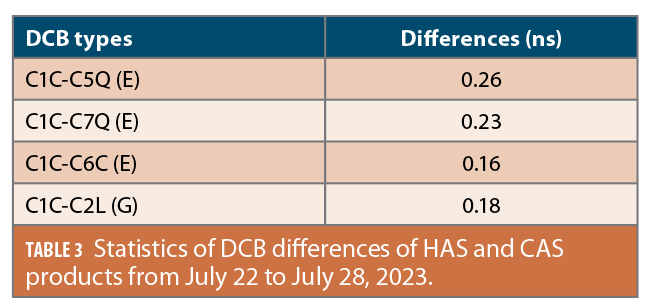
In addition to orbit and clock corrections, HAS also provides support for satellite code bias corrections, which are applied to GPS on L1 C/A, L2C, and L2P signals, as well as to Galileo on E1 C, E5A Q, and E5B Q signals. Currently, HAS phase biases are not available to users, so the assessment of PPP-AR (PPP with carrier-phase ambiguity resolution) must wait as future work. To assess the accuracy of HAS OSBs, DCB products from the Chinese Academy of Sciences (CAS) are employed as a reference. Figure 9 and Table 3 indicate the differences in DCB
between HAS and CAS products are at the sub-nanosecond level. This analysis aligns with the previous conclusion that HAS OSB accuracy remains consistent with the levels observed in 2022 [14].
Positioning Results and Analysis
SPP Solutions
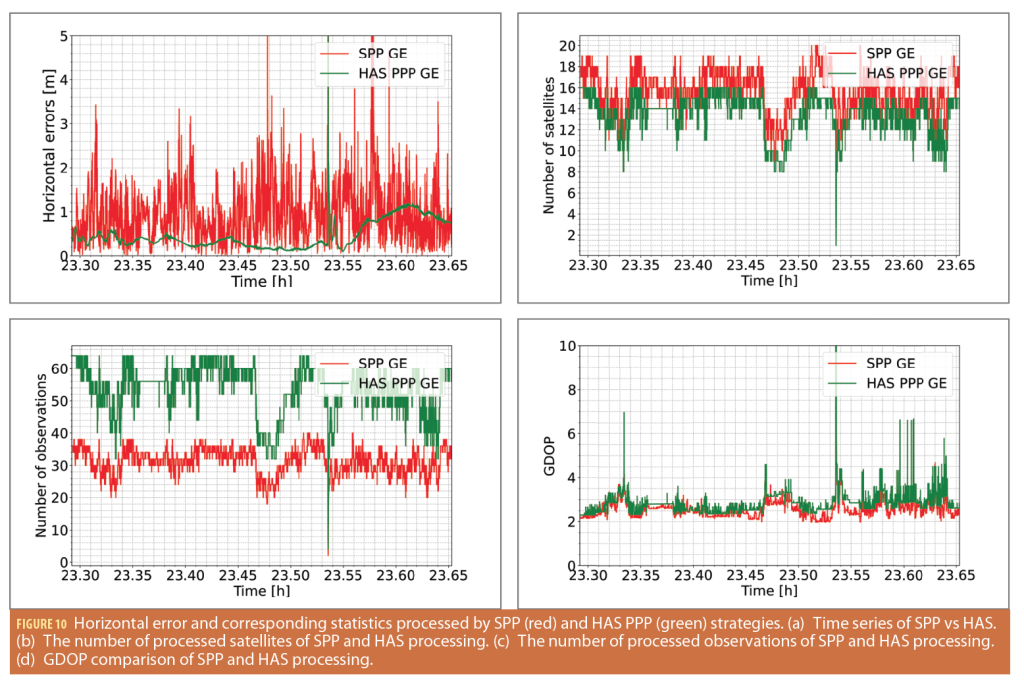
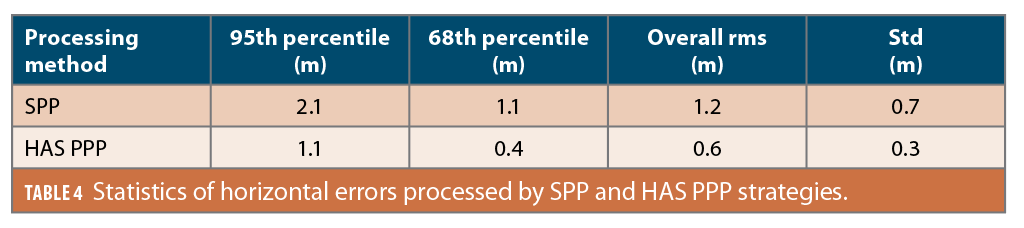
To investigate positioning performance in real-world driving conditions using low-cost sensors, two different GNSS configurations namely SPP (single point positioning) and HAS PPP are initially compared. This comparison is based on the dataset collected on July 25, 2023. SPP represents a traditional GNSS positioning technique frequently employed with low-cost GNSS receivers that are only capable of receiving GNSS pseudorange observations. Figure 10a displays the time series of horizontal errors generated by SPP and HAS PPP. These errors are represented by the red and green lines, respectively. Figures 10b and 10c show the corresponding time series for the number of processed satellites and observations. The observations reveal SPP has the capacity to process a larger number of satellites as compared to HAS PPP. This result is primarily due to the limited availability of HAS corrections. However, despite having access to fewer satellites, HAS PPP consistently delivers more accurate and stable positioning solutions overall when compared to SPP solutions. The improvement is particularly notable when considering metrics such as the 95th percentile errors, 68th percentile errors, and overall rms, as outlined in Table 4. This enhanced performance is attributed to the inclusion of precise carrier phase measurements in the HAS PPP method.
It is worth noting that SPP solutions may, at times, exhibit superior accuracy compared to HAS PPP. This idiosyncrasy occurs when SPP processes a greater number of satellites, leading to more favorable Geometric Dilution of Precision (GDOP), as demonstrated in Figure 10d. Consequently, the effective use of additional satellites and the enhancement of DOP values in HAS PPP solutions deserve further investigation. Additionally, the performance of GNSS-only solutions degrades significantly at certain epochs when the vehicle was traversing an arterial road located beneath a highway viaduct—a notably challenging environment extending over 100 meters.
Positioning Performance Comparison with HAS and CNES Products
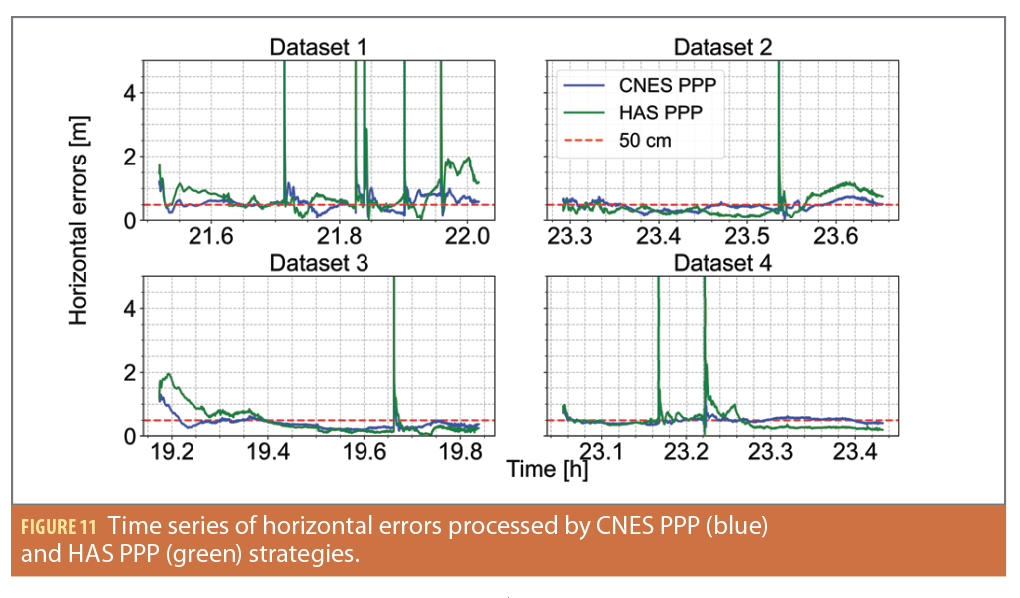
A comparative analysis was conducted between HAS corrections and the ultra-rapid products provided by CNES. To ensure an equitable comparison, the DCB values provided by CAS are also taken into consideration when processing CNES PPP solutions, and the satellite orbit, clock and code bias corrections are applied for both GPS and Galileo constellations and processed in the same dual-frequency uncombined mode. Float solutions were examined as HAS satellite phase biases are currently not transmitted to users. Figure 11 presents the time series of low-cost PPP horizontal errors for datasets 1 to 4. The PPP solutions generated by CNES and HAS products are illustrated by blue and green lines, respectively. The red dashed line indicates the convergence threshold. Defining a precise convergence threshold in dynamic environments with frequent signal loss and filter initialization can be challenging, so a more lenient convergence threshold of 50 cm was set.
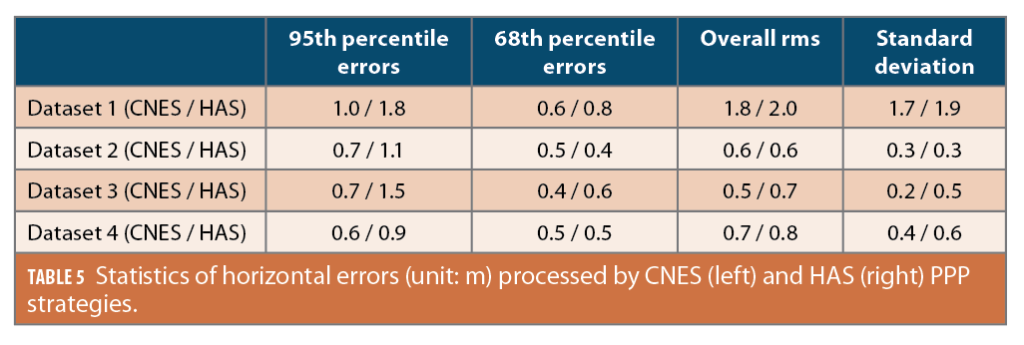
Table 5 presents a comprehensive analysis of the 95th percentile errors, 68th percentile errors, overall rms, and standard deviation for CNES (left) and HAS (right) PPP solutions throughout the datasets. CNES PPP solutions show superior accuracy and stability compared to HAS PPP solutions, primarily due to the higher availability of satellites in CNES corrections. When focusing on the 68th percentile horizontal performance, where an adequate number of satellites are available for GNSS processing, HAS PPP provides comparable positioning performance to CNES ultra-rapid PPP solutions. CNES PPP solutions generally have better performance than HAS PPP, but the results show the potential of HAS corrections in mass-market applications requiring precise navigation.
Positioning Performance Enhancement with IMU Integration
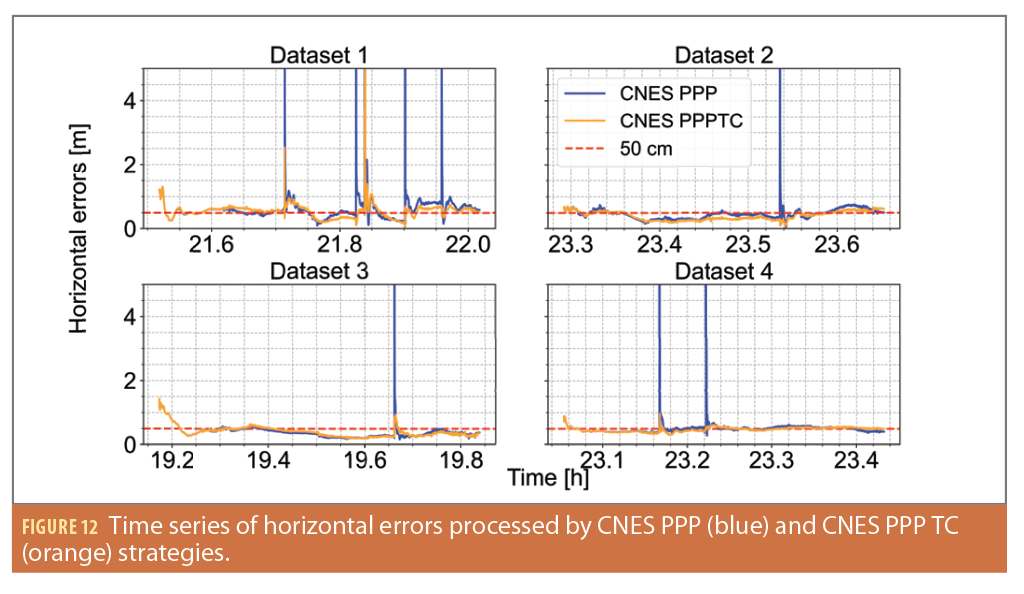
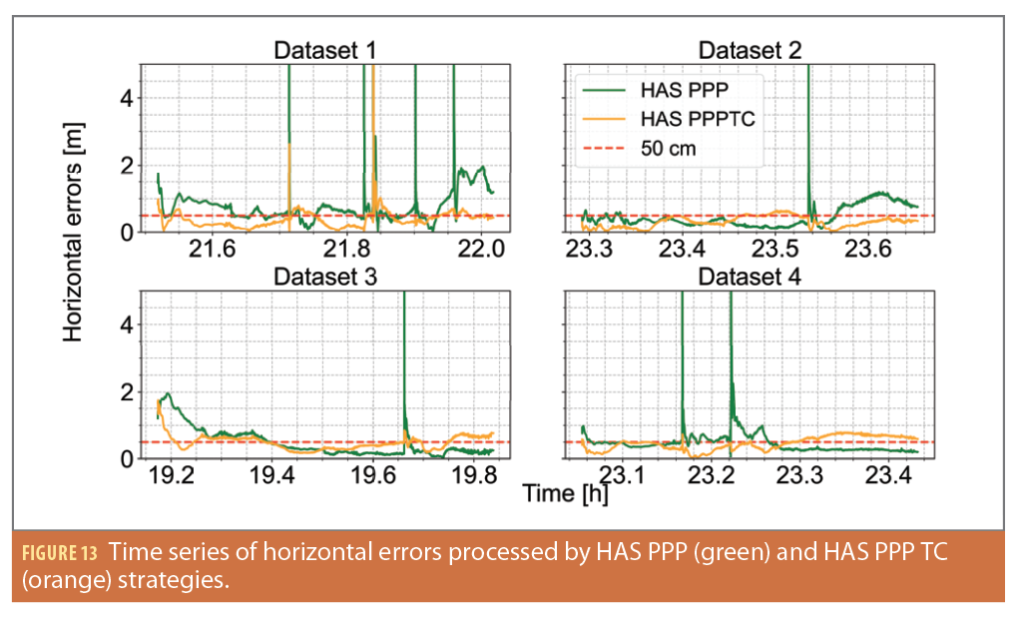
To mitigate potential positioning errors resulting from GNSS outages, we have tightly-integrated a low-cost IMU with the PPP configuration. Figures 12 and 13 present the time series of positioning errors obtained from the CNES (depicted in blue) and HAS (depicted in green) corrections, with their TC solutions shown in orange lines. It is evident the integration of the IMU leads to a substantial reduction in GNSS outage-related errors across the tested datasets. For dataset 1, which serves as an illustrative case, significant levels of 67% and 75% improvements of overall rms can be observed for CNES and HAS PPP solutions, highlighting the significant advantages of IMU integration.
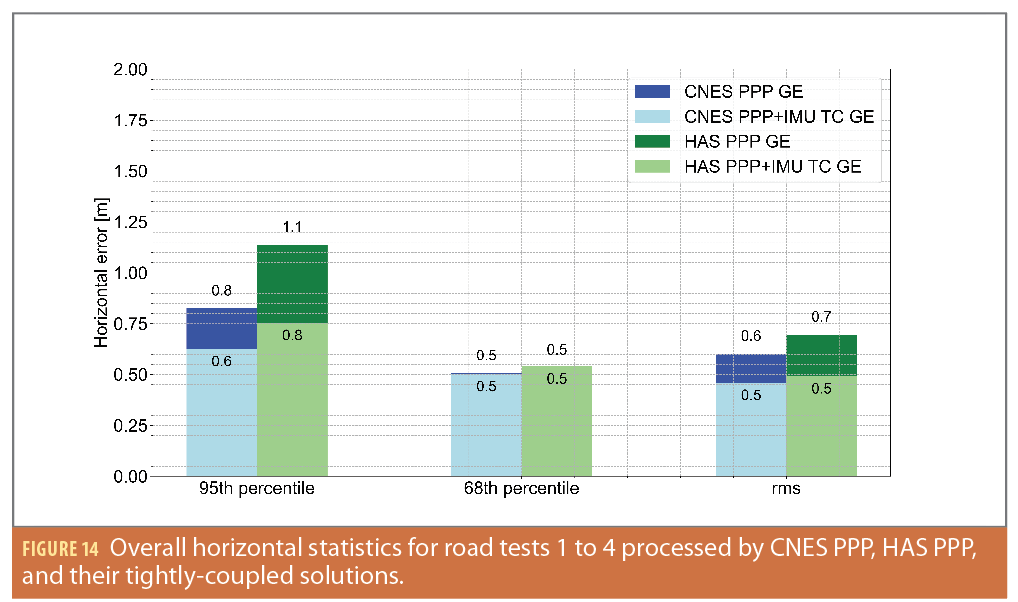
Figure 14 offers a comprehensive overview of horizontal positioning errors across four datasets, encompassing four combinations of processing strategies. CNES and HAS PPP solutions are represented by blue and green bars, respectively, while their TC solutions are depicted in lighter shades. Several significant conclusions can be drawn from this analysis:
1) As expected, CNES PPP solutions exhibit superior performance compared to HAS PPP solutions. Specifically, CNES PPP achieves 0.8 m and 0.6 m for the 95th percentile errors and overall rms, respectively, outperforming HAS PPP solutions, which achieve 1.1 m for the 95th percentile errors and 0.7 m for overall rms. However, when focusing on the 68th percentile errors, HAS PPP solutions exhibit comparable positioning performance to CNES products. 2) The TC integration demonstrates little enhancement for 68th percentile positioning, suggesting the inclusion of the IMU does not significantly impact GNSS-only solutions when a sufficient number of observed satellites is available. 3) It is noteworthy that both HAS and CNES TC solutions achieve a horizontal positioning rms of 0.5 m. This indicates the integration of a low-cost IMU effectively narrows the performance discrepancy between using HAS and CNES products, which is likely attributed to limited HAS availability, where IMU mechanization solutions play a more substantial role in determining the final positioning.
Conclusions and Future Work
To investigate the PPP performance of HAS corrections with low-cost sensors in real-world driving environments, four vehicle experiments were conducted close to York University. The final results provide insights into addressing the posed questions:
Compared to the analysis conducted in 2022, this current study reveals an improvement in data availability. On average, the data indicates that Galileo corrections exhibit an availability rate of 99%, while GPS corrections demonstrate an availability rate of 92% during the period from July 22 to July 29, 2023. However, the SISRE and DCB differences results do not show any significant improvements regarding the accuracy of HAS corrections.
In the context of PPP performance within real-world driving environments, it is evident that CNES PPP solutions consistently outperform HAS PPP solutions when considering metrics such as 95th percentile errors, overall rms and standard deviations. However, an interesting and noteworthy finding is HAS PPP solutions demonstrate comparable, and in some cases, superior performance in terms of the 68th percentile errors. This observation highlights the significant potential of HAS corrections in Location-Based Services (LBS) applications where precise positioning is crucial.
The inclusion of the low-cost IMU leads to several important insights. First, the TC solutions do no harm to GNSS-only solutions when a sufficient number of satellites are available. Furthermore, TC solutions play a pivotal role in significantly mitigating positioning errors during GNSS outages, enhancing the robustness of positioning systems in challenging environments. Most notably, the integration of TC solutions effectively narrows the performance gap between using HAS and CNES corrections, leading to a remarkable achievement of 0.5 m rms for horizontal positioning performance, even in challenging environments.
For future work, the analysis will be expanded to include PPP ambiguity resolution by incorporating HAS phase bias corrections when they become available. Additionally, it is anticipated that PPP-RTK will become a feasible option within the European coverage area once HAS Phase 2 is fully implemented. Furthermore, improvements to the HAS DOP will be made through Galileo broadcast navigation messages, and these HAS studies will be extended to smartphone applications. These improvements open exciting possibilities for enhancing location-based services and navigation capabilities on widely accessible mobile devices.
Acknowledgements
The authors would like to thank the EU Horizon 2020 project GISCAD-OV (Grant Agreement 870231) and the Natural Science and Engineering Research Council of Canada for providing funding for this work. And the authors would like to thank the data contribution from the IGS and Hexagon | NovAtel (decoding HAS corrections) and acknowledge the collaboration from Sogei. Finally, the York authors would like to thank their colleagues at the GNSS Laboratory for their support in collecting field data.
This article is based on material presented in a technical paper at ION GNSS+ 2023, available at ion.org/publications/order-publications.cfm.
References
[1] EUSPA (2023). Galileo High Accuracy Service goes Live! EU Agency for the Space Programme. https://www.euspa.europa. eu/newsroom/news/galileo-high-accuracy-service-now-operational.
[2] EUSPA (2020). Galileo high accuracy service (HAS) info note. European GNSS Agency. https://www.gsc-europa.eu/sites/ default/files/sites/all/files/Galileo_HAS_Info_Note.pdf.
[3] Zumberge, J., Heflin, M., Jefferson, D., Watkins, M., and Webb, F. (1997). Precise point positioning for the efficient and robust analysis of GPS data from large networks. Journal of geophysical research: solid earth, 102(B3):5005–5017.
[4] Bisnath, S. and Gao, Y. (2009). Current state of precise point positioning and future prospects and limitations. In Observing our changing earth, pages 615–623. Springer.
[5] Saito, M., Sato, Y., Miya, M., Shima, M., Omura, Y., Takiguchi, J., and Asari, K. (2011). Centimeter-class augmentation system utilizing quasi-zenith satellite. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), pages 1243–1253.
[6] Miya, M., Fujita, S., Sato, Y., Ota, K., Hirokawa, R., and Takiguchi, J. (2016). Centimeter level augmentation service (CLAS) in Japanese quasi-zenith satellite system, its user interface, detailed design, and plan. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), pages 2864–2869.
[7] Kawate, K., Igarashi, Y., Yamada, H., Akiyama, K., Okeya, M., Takiguchi, H., Murata, M., Sasaki, T., Matsushita, S., Miyoshi, S., et al. (2023). MADOCA: Japanese precise orbit and clock determination tool for GNSS. Advances in Space Research, 71(10):3927–3950.
[8] Tao, J., Liu, J., Hu, Z., Zhao, Q., Chen, G., and Ju, B. (2021). Initial Assessment of the BDS-3 PPP-B2b RTS compared with the CNES RTS. GPS Solutions, 25:1–16.
[9] Xu, Y., Yang, Y., and Li, J. (2021). Performance evaluation of bds-3 ppp-b2b precise point positioning service. GPS Solutions, 25(4):142.
[10] Hirokawa, R., Hauschild, A., & Everett, T. (2023, September). Python Toolkit for Open PPP/PPP-RTK Services. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023) (pp. 2514-2526).
[11] de Blas, F. J., Vázquez, J., Hernández, C., Ostolaza, J., Lagrasta, S., Fernandez-Hernández, I., & Blonski, D. (2023, September). The Galileo High Accuracy Service (HAS): A Pioneer Free-of-Charge Global Precise Positioning Service. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023) (pp. 449-468).
[12] Hauschild, A., Montenbruck, O., Steigenberger, P., Martini, I., and Fernandez-Hernandez, I. (2022). Orbit determination of Sentinel-6A using the Galileo high accuracy service test signal. GPS Solutions, 26(4):120.
[13] Fernandez-Hernandez, I., Chamorro-Moreno, A., Cancela-Diaz, S., Calle-Calle, J. D., Zoccarato, P., Blonski, D., Senni, T., de Blas, F. J., Hernández, C., Simón, J., et al. (2022). Galileo high accuracy service: initial definition and performance. GPS Solutions, 26(3):65.
[14] Naciri, N., Yi, D., Bisnath, S., de Blas, F. J., and Capua, R. (2023). Assessment of Galileo High Accuracy Service (HAS) test signals and preliminary positioning performance. GPS Solutions, 27(2):73.
[15] Naciri, N., Yi, D., Bisnath, S., de Blas, F. J., and Capua, R. (2022). Validation of a European High accuracy GNSS service for cadastral surveying applications. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), pages 381–396.
[16] Abd Rabbou, M. and El-Rabbany, A. (2015). Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems. GPS Solutions, 19:601–609.
[17] Vana, S. and Bisnath, S. (2020). Enhancing navigation in difficult environments with low-cost, dual-frequency GNSS PPP and MEMS IMU. In Beyond 100: The Next Century in Geodesy: Proceedings of the IAG General Assembly, Montreal, Canada, July 8-18, 2019, pages 143–150. Springer.
[18] Yi, D., Yang, S., and Bisnath, S. (2022). Native smartphone single-and dual-frequency GNSS-PPP/IMU solution in real-world driving scenarios. Remote Sensing, 14(14):3286.
[19] European Union (2022). Galileo High Accuracy Service signal-in-space interface control document (HAS SIS ICD), Issue 1.0. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_SIS_ICD_v1.0.pdf.
[20] Montenbruck, O., Steigenberger, P., & Hauschild, A. (2015). Broadcast versus precise ephemerides: a multi-GNSS perspective. GPS Solutions, 19, 321-333.
Authors
Ding Yi is a Ph.D. candidate in the Department of Earth and Space Science and Engineering at York University, Toronto, Canada. Previously, he received his undergraduate degree in Geomatics from Wuhan University in China and obtained a master’s degree in Geomatics Engineering from the University of Stuttgart, Germany. Currently, his research interests involve precise point positioning (PPP) technology and multi-sensor integration.
Nacer Naciri is a postdoctoral fellow at the NASA Jet Propulsion Laboratory. He holds a Ph.D. from York University, Canada, as well as an aeronautics engineering degree from ISAE-SUPAERO in France, and an M.Sc. in aerospace engineering from KTH Royal Institute of Technology in Sweden. His research interests involve multi-GNSS, multi-frequency PPP-AR.
Sunil Bisnath is a Full Professor in the Department of Earth and Space Science and Engineering at York University, Toronto, Canada. He received his Ph.D. in Geodesy and Geomatics Engineering from the University of New Brunswick. For over 25 years, he’s actively researched GNSS processing algorithms for positioning and navigation applications.
F. Javier de Blas is the Commercial and High Accuracy Service Manager at the EU Agency for the Space Programme (EUSPA). He has been leading the implementation of the Galileo HAS and CAS services, while actively contributing to Galileo Services’ Management activities within the Agency. He holds a M.Sc. degree in Aeronautical Engineering and a master’s degree in Airport and Air Navigation Systems from the Technical University of Madrid.
Roberto Capua is responsible for GNSS R&D at Sogei, the technological partner of Ministry of Economy and Finance of Italy. He received his master’s in Electronic Engineering from Sapienza Università di Roma and has 25 years of experience in the field of GNSS applications, research and development for public and private organizations. His areas of activity include advanced GNSS augmentation systems for high accuracy and integrity, GNSS software receivers and GNSS surveying.




