
June 29, 2009
CSR, SiRF Complete Merger
CSR plc and SiRF Technology Holdings Inc., have completed the merger between SiRF and a wholly owned subsidiary of CSR.
By Inside GNSSGlobal Navigation Satellite Systems Engineering, Policy, and Design
CSR plc and SiRF Technology Holdings Inc., have completed the merger between SiRF and a wholly owned subsidiary of CSR.
By Inside GNSS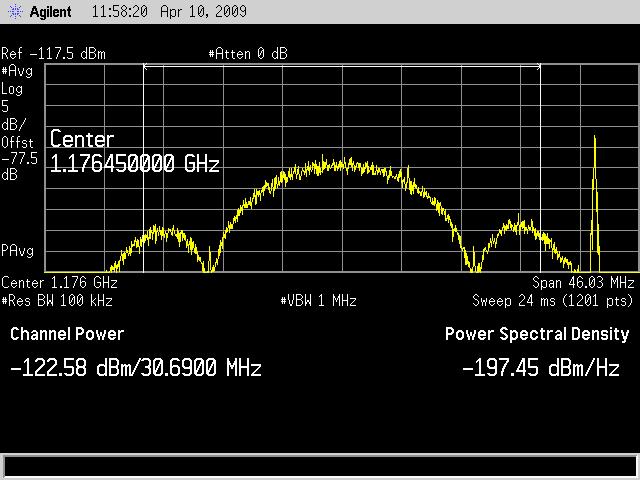 Time Series and Power Spectrum of the L5 Demonstration Signal
Time Series and Power Spectrum of the L5 Demonstration SignalThe GPS IIR-20(M) satellite successfully transmitted for the first time a GPS signal in the L5 frequency band today (April 10), according to the U.S. Air Force operators of the Global Positioning System. L5, the third civil GPS signal, will eventually support safety-of-life applications for aviation and provide improved availability and accuracy to users.
By Inside GNSS Transportation Secretary Ray LaHood
Transportation Secretary Ray LaHoodOne change that apparently won’t happen under the Obama administration is replacing the federal gasoline tax with a GPS-monitored mileage fee.
In an interview with the Associated Press last week, U.S. Department of Transportation (DoT) Secretary Ray LaHood had suggested that his agency should look at a “vehicular miles program where people are actually clocked on the number of miles that they traveled.”
It was one of the shortest flights of a trial balloon so far this year.
By Glen Gibbons
In trying to ensure integrity of GNSS navigation systems for civil aviation, various approaches have produced a range of different concepts, most of which assume the computation of a protection level. This computation is usually accomplished either autonomously (that is, entirely based on information gathered by the user receiver) or with some degree of external assistance.
In trying to ensure integrity of GNSS navigation systems for civil aviation, various approaches have produced a range of different concepts, most of which assume the computation of a protection level. This computation is usually accomplished either autonomously (that is, entirely based on information gathered by the user receiver) or with some degree of external assistance.
Such information may be provided by integrity augmentation systems (for example, space-based or ground-based augmentation systems — SBAS and GBAS). It may also be provided directly by the GNSS constellation, as it is foreseen with the future GPS III — remarkably enough, the GPS SPS Performance Standard already includes integrity performance specifications — and Galileo.
Autonomous protection-level computation techniques, however, have never been seriously considered as reliable sole means for ensuring integrity in safety-of-life (SoL) applications, not only because of the poor performances achieved, but also due to the somewhat delicate assumptions all of them rely upon. As a result, such techniques have mostly been considered as complementary to external integrity systems. One example: GPS+receiver autonomous integrity monitoring (RAIM) is not allowed as a primary navigation means for precision approach operations.
Recently, in regard of the improvements on accuracy and reliability expected from the future constellations GPS III and Galileo, new approaches have been proposed for the apportionment of integrity requirements. This is reflected, for instance, in the conclusions presented in the Phase I report of the USA GNSS Evolutionary Architecture Study (GEAS). The report suggests that the allocation of the burden for providing integrity should be balanced towards the user receiver, thus conferring user-based integrity (that is, receiver autonomous integrity) a higher responsibility.
User-based integrity is also gaining importance due to the emergence of a new field of GNSS applications, the so-called liability-critical applications (i.e., those where undetected GNSS large position errors can generate significant legal or economic negative consequences). Some leading examples of such applications are road tolling/congestion charging (both for highways and city areas), law enforcement (e.g., speed fining or surveillance of parolees) or “pay as you drive” insurance schemes.
Unlike air navigation, liability-critical applications often take place in harsh operating environments dominated by local effects such as multipath. Under such conditions these applications cannot always be monitored or aided by external (global, regional, or even local) augmentation systems.
Even in civil aviation, some landing operations could also be subject to large multipath that could put the navigation integrity at risk. For those scenarios the proposed technology would mitigate the associated risk.
One key assumption of conventional RAIM schemes is that simultaneous faulty measurements are extremely unlikely. This single-fault assumption, however, fails to hold in a typical liability-critical application scenario, where multipath is the primary source for large measurement errors and will quite frequently affect more than one measurement at a time. The single-fault assumption also fails to hold in the future air navigation scenario, where the large number of satellites made available by the joint use of several constellations (GPS/Galileo/GLONASS) will significantly increase the probability of multiple simultaneous faults.
Other assumptions common to all existing RAIM schemes include one or another statistical model of the individual measurement errors, trying in particular to bound the tails of their distributions. This sort of assumption is somewhat risky and difficult to verify, especially when the target confidence level is very high, as in the case of SoL applications such as civil aviation.
Moreover, under heavy multipath conditions most statistical assumptions of this nature just do not hold as errors caused by multipath are strongly dependent on the geometric characteristics of the local environment. (An especially acute example of this is non-line-of-sight (NLoS) multipath — that is, when a signal is tracked by GNSS equipment as it reflects from some surface despite the fact that a direct view of the satellite is occluded by some obstacle.) Hence, it is almost impossible to come up with a statistical characterization of such errors that can be used for integrity monitoring.
In this article we present a novel technique for autonomous computation of protection levels, the isotropy-based protection level concept, or IBPL for short. This technique makes no particular assumption on the statistics of individual measurement errors and provides coverage against multiple fault conditions. It takes advantage of a possible future multi-constellation scheme as its performance improves rapidly with the amount of satellites used for positioning.
Discussion in this article will show that asymptotic performance of the IBPL with respect to the number of satellites is comparable to that obtained with SBAS protection levels. This fact makes the IBPL a very promising technique, not only for liability-critical applications (the framework where it was born) but also, and very particularly, for SoL applications. We believe that IBPL fits remarkably well in the scheme proposed by the GEAS panel mentioned earlier, which recommends a shift of the integrity responsibility towards the on-board equipment.
Furthermore, as a fully autonomous method, the IBPL-based approach does not require integrity information to be transmitted on the GNSS or SBAS signal in space. This dramatically simplifies the interoperation of multiple GNSS constellations for integrity purposes, avoiding the problem of combining different integrity concepts from the various constellations or augmentation systems.
Autonomous Integrity: Two Approaches
For liability-critical applications, particularly in urban areas, local effects such as multipath — especially NLoS multipath — are by far the main source of errors and, consequently, the main threat to accuracy and integrity. In this framework, the conventional notion of faulty measurement as a large measurement error caused by a satellite malfunction is no longer useful.
. . .
IBPL: the Concept
The IBPL algorithm does not implement measurement rejection techniques but rather computes a protection level based on the all-in-view least squares solution. Of course, other IBPL solutions are possible, for instance, when different subsets of measurements are used and the one with smallest IBPL is selected. However, in its simplest form (as described in this article), this algorithm is a strict ECA concept implementation. On the other hand, this does not exclude the possibility that some refinements can be made for open-sky applications by including some kind of fault detection/exclusion mechanism.
. . .
Validating IBPL Integrity
Of course, we need to validate this new protection level concept and its underlying isotropy assumption in terms of the achieved integrity, and that must be done by experimentation with real data. We have to show that the theoretical confidence level of the isotropy-based protection level is satisfied in real life. Our discussion here cannot be considered as a full validation of the IBPL concept, but it provides significant information about the validity of the proposed algorithms.
. . .
IBPL Performance Results
From the same open-sky test run for IBPL integrity validation we derive performance figures in the form of accumulated histograms of protection level sizes.
. . .
Asymptotic Convergence of IBPL to SBAS PL
Another remarkable property of the IBPL concept is its convergence to the definition of PL currently used in SBASs (see Annex J of RTCA/DO-229D cited in the Additional Resources section at the end of this article).
. . .
About the Isotropy Assumption
Once the isotropy assumption has been accepted, the level of integrity achieved with the IBPL concept can be proven mathematically, and is therefore incontrovertible. The only controvertible point of the method is the isotropy assumption itself, or, more precisely, the extent to which this assumption represents the real world.
. . .
Conclusions
The isotropy-based protection level concept arose as the result of investigations concerning GNSS liability critical applications, in particular in urban environments. The authors found, however, that this notion also shows a great availability performance in open-sky environments and could therefore become a major breakthrough in open-sky SoL applications such as civil aviation. Isotropy-based protection levels are completely autonomous, are easily computable in real time, and rely on a single, quite verisimilar and verifiable hypothesis.
Unlike other approaches for integrity being defined as part of the GEAS initiative, the IBPL method does not require, in principle, any ground monitoring, though detection and exclusion of faulty satellites by the ground segment would help guarantee isotropy, leaving the protection level computation to the user — through the IBPL — and thus simplifying ground segment design.
IBPL’s sensitivity to the number of satellites becomes a clear advantage in open sky. With currently no more than 10 satellites in view on average (GPS only) and 20 or even more when considering either GLONASS or the future European Galileo system, this PL concept will predictably yield great performances, with smaller protection levels than those achieved nowadays by existing SBASs such as the U.S. Federal Aviation Wide Area Augmentation System or the European Geostationary Navigation Overlay Service.
For the complete story, including figures, graphs, and images, please download the PDF of the article, above.
Additional Resources
[1] Cosmen-Schortmann, J., and M. Martínez-Olagüe, M. Toledo-López, and M. Azaola-Saenz, “Integrity in Urban and Road Environments and Its Use in Liability Critical Applications,” Proceedings of the Position Location and Navigation Symposium (PLANS) 2008, Monterey, California, May 6–8, 2008
[2] GNSS Evolutionary Architecture Study, Phase I – Panel Report, February, 2008, available on-line at <http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/library/documents/media/GEAS_PhaseI_report_FINAL_15Feb08.pdf>
[3] RTCA Inc., RTCA/DO-229D, “Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment,” 2006
 NavX-NCS
NavX-NCSBlaupunkt GmbH, a leading automotive electronics manufacturer, has selected the NavX-NCS multiconstellation, multifrequency GNSS simulator from IfEN GmbH as the GPS reference for production testing of its car navigation systems.
The NavX-NCS RF constellation simulator supports all present and planned Galileo and GPS frequencies (E1/L1, L2C, E5AB/L5, E6) in one box, now including the composite binary offset carrier (CBOC) signal structure for the Galileo Open Service on E1.
By Glen Gibbons
So, President Obama wants to spend some money on infrastructure, eh? Well, here’s an idea: send some of it GPS’s way.
Infrastructure isn’t just concrete and rebar. We can also build highways to the stars and — pardon the clichés — bridges to the future rather than bridges to nowhere.
And talk about bang for the buck. The billion dollars or so that the United States spends on GPS each year produces many tens of billions of dollars in products and services.
So, President Obama wants to spend some money on infrastructure, eh? Well, here’s an idea: send some of it GPS’s way.
Infrastructure isn’t just concrete and rebar. We can also build highways to the stars and — pardon the clichés — bridges to the future rather than bridges to nowhere.
And talk about bang for the buck. The billion dollars or so that the United States spends on GPS each year produces many tens of billions of dollars in products and services.
Of course, a big chunk of that GPS market is outside of this country. But after our recent lamentable contribution to global financial troubles, perhaps its time to remind the world about the unprecedented U.S. generosity in creating an entirely new public utility and making it available everywhere.
Not only that, but U.S. policy forced other GNSS providers to be generous, too. As the would-be Galileo public-private partnership discovered, you can’t compete with free.
Anyway, back to Obama and infrastructure.
The Global Positioning System has many unusual, novel, perhaps even unique features. But the one that relates to the current topic is that GPS is both a critical infrastructure in itself — notably its ground control and space segments and the pervasive, strategic installation of high-performance receivers — and a contributor to other critical infrastructures, such as communications networks or transportation.
That should earn GPS double the attention, if not twice the budget.
But there’s more. GPS not only allows us to do things that we couldn’t do before; it allows us to do them more efficiently — greater productivity at less cost, whether surveying forest boundaries or guiding a thousand airplanes at once.
And though those efficiencies may reduce the job opportunities at individual enterprises, they stimulate a far greater amount of job creation overall — design and engineering, manufacturing, professional fieldwork — most of it high-skilled and higher-paying than the positions that were lost.
The United States really hasn’t had an industrial policy since just before and during World War II, when the Roosevelt administration converted much of the nation’s jobless into public employees (Works Progress Administration, Civilian Conservation Corps), its manufacturing sector into an armament assembly line, and gasoline and foodstuffs into ration coupons.
After that, we saw occasional, isolated initiatives — the interstate highway system, the lunar missions of the 1960s, SEMATECH — large-scale infrastructure and technology programs that could have served as potential components of an industrial policy, if one had existed.
GPS can help thread the new infrastructure efforts together, and expand the role that it already plays. Many commercial GPS manufacturers are looking forward to the opportunities that building or restoring highways, bridges, and (imagine!) maybe even railroads will bring.
But the United States is still running the GPS program as though we had all the time in the world. Well, no offense to those atomic clocks on board the GPS satellites (another first of its kind), but the world is quickly catching up with us in matters of GNSS. And, if we take a close look at the world’s four GNSS program schedules, over the next few years just about every other GNSS system is going to pass GPS by in terms of signal availability, modernity, and diversity.
The United States risks seeing its GPS brand decline amid the growing choices in the GNSS marketplace.
It’s time that the GPS leadership, civil and military, revisited its prevailing philosophy and began launching for scheduled capability, rather than as needed to sustain an aging constellation.
And, while they’re at it, they should take another look at the size of the constellation. Every other GNSS system is committed to a true 30 satellite/30 slot configuration. If the advent of the biggest infrastructure investment in American history isn’t the right time to do the same with GPS, when is?
As American poet Edwin Markham asked on behalf of the man with the hoe gazing at the ground, “Give back the upward looking and the light/ Rebuild in it the music and the dream”
By
GPS Creations offers the GPS SIM14, an L1/L2 GPS constellation simulator available in either C/A code–only or C/A-code and P-code configurations, which can simulate up to 14 satellites simultaneously. The simulator can be integrated with a multi-function feature card (MFI/O) to provide extended capabilities such as IMU, automotive, and factory test & timing. An adjustable RF power output has a dynamic range of 66 dB.
By Glen Gibbons
CeBIT is the world’s largest information and communications technology exhibition, concentrating on the business-to-business, not the consumer, market.
The massive German trade fair at the Hannover Exhibition Center includes a dedicated Telematics and Navigation section in Halls 14 and 15.
It features indoor GPS reception for real time navigation and positioning at exhibitors’ booths.
A joint exhibit area is prominently located in the T & N section for the Galileo satellite navigation community
By Inside GNSS
Blaupunkt, a leading supplier of automotive systems, has signed a “frame” agreement with u-blox to supply GPS and Galileo receiver technology for navigation, driver-assistance, and related in-vehicle systems.
By Glen Gibbons
For the first time, the navigation industry will engage in discussions and make presentations on the first two days of the SYSTEMS, the ICT trade show, in a separate conference forum.
The winners of the European Satellite Navigation Competition will present their ideas at this event.
It will be held directly adjacent to the Navigation World Area in Hall B1 of the New Munich Trade Fair Center in Munich, Germany.
By Inside GNSS
NaviForum, China’s large GNSS industry event, has been postponed from this December until next year.
“Due to the big earthquake and Olympics game in China, the Chinese government decided to postpone the NaviForum to sometime next year,” NaviForum organizer Peter Zhou told Inside GNSS. Zhou is executive secretary of the conference’s organizing committee.
By Glen Gibbons
ST-NXP Wireless, a new company bringing together key wireless operations of STMicroelectronics and NXP, will begin operations August 2 following completion of a deal announced earlier this year.
Owning thousands of communication and multimedia patents, the new joint venture will bring key technologies for UMTS (Universal Mobile Telecommunication System) and for the emerging TD-SCDMA standard, as well as other cellular, multimedia and connectivity capabilities — including WiFi, Bluetooth, GPS, FM radio, USB, and UWB (ultra-wideband).
By Glen Gibbons
Conference and exhibition on automotive, mobile and web-based telematics takes place in The Rock Financial Showplace in Novi, Michigan, USA. It features a Navigation and Location miniconference on May 21 and 22 focusing on new developments and delivery strategies for navigation and location based strategies across industries.
By Inside GNSS