August 31, 2012
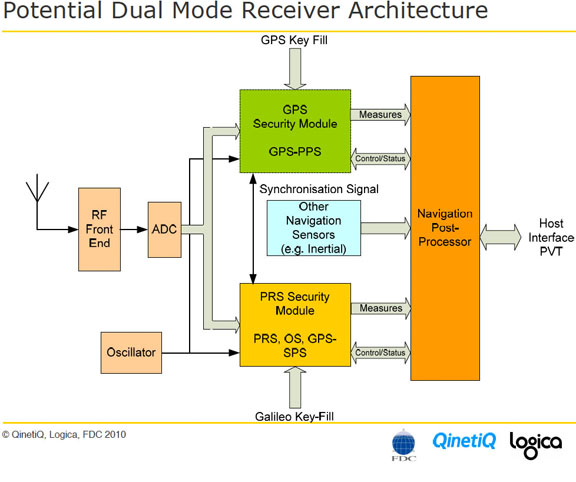 Nominal architecture of a GPS/Galileo PRS receiver
Nominal architecture of a GPS/Galileo PRS receiver
U.S. Officials Explore Use of the EU’s Galileo Secure Civil Signal
Nominal architecture of a GPS/Galileo PRS receiverThe United States and the European Union are talking about how U.S. agencies might use the secure signal planned for Galileo to better fulfill their various responsibilities.
By Dee Ann Divis