
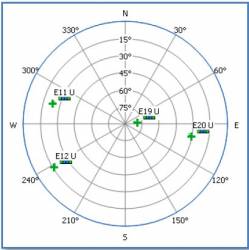
 Skyplot of Galileo IOV satellite locations used in Septentrio position determination.
Skyplot of Galileo IOV satellite locations used in Septentrio position determination.Two European organizations announced successful positioning results yesterday (March 12, 2013) using signals from the four Galileo in-orbit validation (IOV) satellites.
The NavSAS group of Politecnico di Torino and Instituto Superiore Mario Boella in Turin, Italy, obtained its first Galileo autonomous position using signals from the Protoflight Model (PFM) and three Flight Model space vehicles (FM2, FM3, FM4), which have started transmitting valid navigation messages.
Two European organizations announced successful positioning results yesterday (March 12, 2013) using signals from the four Galileo in-orbit validation (IOV) satellites.
The NavSAS group of Politecnico di Torino and Instituto Superiore Mario Boella in Turin, Italy, obtained its first Galileo autonomous position using signals from the Protoflight Model (PFM) and three Flight Model space vehicles (FM2, FM3, FM4), which have started transmitting valid navigation messages.
The valid navigation message enable the users to compute the fix using the real Galileo signals-in-space, and the researchers of the NavSAS team achieved it by using the N-GENE software receiver developed by the team.
The positions obtained are depicted in the accompanying figure, as red squares on the rooftop of the NavSAS Lab where the antenna is located
Meanwhile, Septentrio officials said that the Leuven, Belgium–based company obtained a first autonomous real-time Galileo PVT calculation, based on live interface condtrol document–compliant Galileo messages from the four Galileo IOV satellites. (See accompanying skyplot of satellite locations.)
The standalone position was calculated from in-orbit navigation messages using a standard PolaRx4 GNSS receiver equipped with commercially released firmware.




