
The family eagerly climbed into the sparkling latest-model SUV and drove off the lot for a test cruise around town. With pent-up demand after months of isolation, they were primed to purchase a new car with the latest safety, efficiency and driver-assistance features. This was it. The dealer anticipated a quick sale.
Half an hour later, the father dropped the keys on the dealer’s desk. “It’s got everything we want—almost,” he said regretfully. “I’ve got to tell you, the navigation just doesn’t cut it. We were down- town, and the dashboard display showed us all over the place. We could not get reliable voice directions. She had us going forward, back, over, under, sideways. Totally confused down between the skyscrapers. I can’t put my teen drivers, my whole family, into something unreliable like that. We’ll have to look somewhere else.”
The cable company CEO prepared to renovate her fleet: 125 vans operating over a five-state area. New telematics modules with live vehicle tracking to optimize assignments and routing, increase productivity, tighten efficiency, generate customer-pleasing ETA alerts and send results straight to the bottom line—that’s how the RFP read. The contract would sustain the fleet-tracking service provider for years and generate much-needed referrals.
But for want of a nail, the shoe was lost; for want of a shoe, the horse was lost; for want of a horse, the battle was lost…A highly competitive bidding process turned out to revolve around the accuracy and continuity of vehicle tracking in dense urban environments. The telematic black box’s test performance in a city with multiple tunnels, over-and-under highway interchanges and parking garages did not provide sufficient continuity or robustness.
Both these lost sales could have been avoided with a relatively simple after-market solution, one that did not involve years in the vehicle OEM design cycle nor costly re-integration of fleet-tracking modules.
GIVE. An innovative GNSS/Inertial Vehicular Engine. This software-driven solution tightly combines carrier-phase GNSS with inertial measurements and the vehicle motion model to produce consistent position, velocity and attitude data in challenging environments.
Vehicle navigation for actively engaged drivers represents today’s largest, fastest growing segment for positioning technologies. Low cost, ease of installation and self-containment, with no need to connect to the vehicle’s CAN bus, are the key drivers in this market. GIVE has them all.
The self-contained, sensor-agnostic solution uses consumer-grade GNSS chipsets and low-cost microelectromechanical systems (MEMS) sensors to enable robust automotive navigation and tracking, even in places where a GPS signal may be completely lost for as much as 5 or 10 minutes. Its strength is in the software, which is customizable to the implementation platform.
GIVE can be installed on almost any vehicle, with no requirement for connection to the CAN bus. It can also be ported onto smartphones—a key benefit for operator-drivers of large fleets. It makes consistent, reliable navigation possible in tunnels, garages and the steepest, deepest urban canyons.
TESTING, TESTING
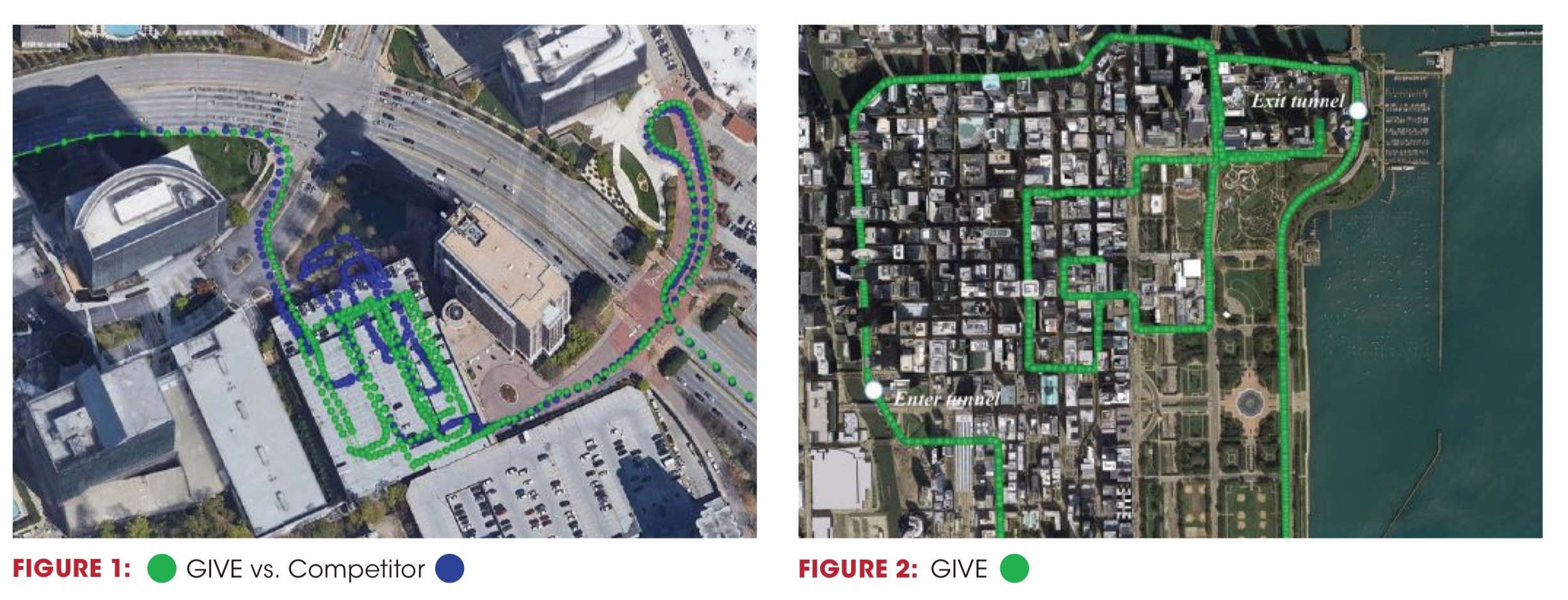
To demonstrate real-time performance in harsh GNSS environments, GIVE-equipped vehicles have conducted extensive road tests in Atlanta, Chicago and San Francisco. Full data sets are available on request. The accompanying figures and this summary demonstrate GIVE capability.
Driving two loops inside an enclosed parking garage, with a 5-minute GNSS outage, the GIVE system consistently kept vehicle tracking data on the correct path (Figure 1). An even greater challenge came inside a tunnel on Lower Wacker Drive in Chicago—2.2 miles long and a 5- to 7-minute complete GNSS outage! Again, tracking data showed consistent and accurate performance (Figure 2).
HOW IT WORKS
In difficult GNSS signal environments for driving—skyscraper-stacked downtowns, tunnels and parking structures—GNSS performance may be severely degraded or completely denied. Inertial measurement unit (IMU) aiding can help to some extent but brings its own vulnerabilities to the problem.
GIVE’s solution employs powerful software to wring maximum performance from consumer-grade, relatively low-cost GNSS and inertial sensors of cell-phone quality.
The navigation engine fuses GNSS carrier-phase measurements and pseudoranges with IMU measurements and a vehicular motion model featuring non-holonomic constraints and zero-velocity updates. Non-holonomic means it benefits from knowing that the vehicle remains on the Earth’s surface and does not move suddenly side-to-side. Zero-velocity updates detect when the car stops, and use that to update the inertial position, halting inertial drift, the technology’s prime weakness.
The system can coast for a relatively long time—5 to 10 minutes or longer—without GNSS data, and without expensive hardware.
MULTIPATH MITIGATION
Multipath is the bugaboo found in urban canyons: reflected signals off tall buildings confuse GNSS receivers that have no direct view of the satellites in the sky. The key lies in identifying which GNSS measurements are the outliers, ones caused by multipath, and excluding them from the data fusion. GIVE’s algorithms detect and eliminate bad measurements, negating multipath effects.
Multipath mitigation in GIVE provides two levels of protection:
• Inertial-based statistical gating: residual screening of the tightly coupled Kalman filter.
Measurement quality control can be ac- complished most efficiently by predicting GNSS measurements values based on the in- ertial solution; comparing predicted and actual measurements; and then discarding measure- ments with large discrepancies. GIVE applies inertial-based statistical gating to eliminate those GNSS measurements that do not agree with their values predicted by inertial outputs.
• Probabilistic data association filtering (PDAF): adaptive weighting incorporates probability of missed detection.
PDAF further mitigates the influence of outliers that pass through the residual check. PDAF modifies the Kalman filer estimation step by directly incorporating a probability of outlier missed-detection into the measurement/prediction weighting scheme.
PDAF proves particularly beneficial for “transitioning” cases, passing from GNSS-denied to GNSS-challenged environments such as emerging from a tunnel into an urban canyon. In such cases, residual sigma bounds are increased due to unmitigated inertial drift, and multipath errors can leak through, with detrimental effects on the navigation performance. De-weighting the potentially corrupted measurements based on their respective missed-detection probabilities significantly improves the robustness of multipath mitigation performance.
CARRIER-PHASE PROCESSING
GIVE also takes advantage of temporal carrier-phase differences over time. Temporal differencing eliminates GNSS integer ambiguities while capturing the underlying motion dynamic for the inertial error-state estimation. Temporal differences reveal their value in the identification and removal of close-range non-line-of-sight (NLOS) multipath errors. It may be challenging to identify multipath signals reflected by buildings close within the range domain. Yet significant Doppler differences are generally present, due to the difference in LOS between direct and multipath signals, which makes multipath errors readily distinguishable in the temporal phase domain.
TAKE IT TO THE BOTTOM LINE
With GIVE’s powerful software, low-cost, easily installed sensors can meet requirements for navigation, map-matching, telematics and fleet-vehicle tracking. They function to customer satisfaction in challenging environments such as urban canyons, tunnels and parking garages. A consistent and reliable positioning on the meter level, capable of withstanding 5 to 10-minute outages, fulfills a growing need— one that can make or break a sale.
M Is L5’s Plan B")



