An extensive and significant body of technical information on inertial navigation, including detailed instruction, technical papers and use cases, has appeared online. This valuable resource is openly available to engineers, designers, integrators, and specifiers working on UAVs, aerial and ground survey and mapping, construction, surveillance and reconnaissance, satellite communications, military and much more.
Responsible for this engineering resource is VectorNav, an 12-year old company with an extensive track record fielding more than 40,000 inertial measurement units and inertial navigation systems to customers across industry sectors. VectorNav has consistently reduced the size, weight and power (SWaP) requirements for IMUs and INSs, opening up vast new areas for inertial application.
Sit down with two visionaries from the company as they frankly discuss the what, why, where, when and how of this wide-ranging library of technical knowledge, centered around the fastest-growing and currently most vital technology in positioning and navigation.
Inside GNSS: VectorNav launched more than 11 years ago, in 2008, and made its first major trade show appearance at Sensor Expo in 2009. At that show you brought just the VN-100 IMU/AHRS. At AUVSI in Las Vegas in 2012 — where we met — you introduced your second product, the VN-200 GPS/INS. You have since developed a reputation for best-in-class heading and GPS/INS solutions. To what can this track record of success be attributed?

Jakub Maslikowski, Director, Sales and Marketing, VectorNav Technologies: That’s right, we launched with our VN-100 IMU/AHRS. Ever since then, our core expertise has always been inertial navigation. We’re not pursuing other technologies or applications; we leave that to our customers. They develop autonomous platforms and payloads and we take care of their inertial requirements. I believe that singular focus has been a big part of our success.
Over the years our capabilities have matured quite a bit as we’ve worked in a lot of different areas, and as we’ve fielded more than 40,000 inertial measurement units (IMUs) and inertial navigation systems (INSs) in a range of applications. We’ve amassed a large body of knowledge that we want to share with the market. It’s very comprehensive and reflective of who we’ve become.
IG: You’re now launching an updated VectorNav brand. What does this signify to your current and future customers? What brand attributes is this new aesthetic designed to communicate?
Jakub: We’re making a major new investment into our brand for the customer base we support and for the PNT community. We’ve produced an extensively updated and expanded [we’ve had always had a version of the library up, but this new revision is a vast rewrite and expansion] library of knowledge on inertial nav, shared on our website, greatly fleshed out. This has been in the works for a long time, we always knew that when we wanted to take this on that it would be purposeful, comprehensive and unique. We want it to really reflect the advances and the state of the art in the industry, and to have significant impact.
We’ve made this material available and we think it will play an important role in the user communities, enabling better decisions about IMUs, gyros & accelerometers and GNSS-Aided INSs. It’s a resource for engineers.
That’s always been our mission as leaders in this field: to enable customers with all the information that we can put out there, to help them understand how to integrate a particular inertial system into their platform. The better we can do that, the more successful they’re going to be.
IG: The archive has a lot of technical content, both technical papers and use cases. What was the thinking behind posting this content? How would you like (and expect) the PNT design and integration communities to engage it? What benefit can they expect to gain from it?

Jeremy J. Davis, Ph.D., Director of Engineering, VectorNav. Our goal is to enable engineers to be more successful in understanding, selecting and integrating inertial systems. We divided the technical content into two categories: a broad knowledge base on inertial navigation that we called the library, and deep dives into how to integrate inertial into specific applications, the application notes.
The first step is for people to understand which solutions make the most sense for their applications, what things they’ll need to be careful about, and to grasp a common language to use as we go through the different possible options and pitfalls to integrate an inertial sensor.
The library content basically provides a textbook on inertial navigation, from a very top-level perspective. It’s not VectorNav-centric. It says, here’s what inertial sensors are, how they work, the different algorithms, and how performance is measured. It’s intended for a wide range of engineers, regardless of background, to be able to integrate inertial into their end system.
It doesn’t matter whether they’re with a small startup or a large defense contractor – the particular engineers that get tasked with integrating inertial, there’s often some holes in their understanding of how to do that. Whether it’s the sensor selection, or the algorithms, or the hardware, there are a lot of “moving parts,” so to speak.
The second prong of this information effort, which is also crucial, is a series of application notes, with more in development to be pushed out later. These do a deep dive into the applications that our customers are most focused on. The notes delve into what the applications entail, what are the different components, how inertial ties into those, what are the implications of the applications for the inertial component. Further, which sensors will work well for that particular application, and how should they be integrated to get the best performance. It all comes from our experience working with customers on every application that’s out there.
IG: How about just one example?
Jeremy: Sure. One of the things we’ve spent a lot of time on in both the library and the application notes is understanding the roles and the differences between single-antenna GNSS/INS products and dual-antenna GNSS/INS.
What it comes down to is being able to get very accurate heading. Single-antenna GNSS/INS products like the VN-200 and VN-210, provide accurate heading with significant motion and dynamics, like a fixed-wing aircraft trying to aim a gimballed camera or a SATCOM antenna. As long as you are moving around continuously, you get great data. The library talks through why that is.
That breaks down if you’re moving slowly or not at all. In that case, the VN-300 and VN-310 dual-antenna GNSS/INS products use a technique called GNSS compassing. They can give you a heading from GNSS signals alone, even while the unit is completely stationary, completely static. This is ideally suited for marine applications – an unmanned surface vessel or a SATCOM antenna on a manned vessel – or an unmanned ground vehicle, and whatever weapon or sensor system payload that you’re trying to point. You may be moving most of the time, but if you’re sometimes sitting still or moving slowly, then this is what you need.
The library discusses requirements for both single- and dual-antenna units to be effective. We talk about which one makes the most sense for different applications in a general way, so that engineers can figure out for themselves.Usually it’s down to a simple question like, what kind of platform are you mounting it on? At other times, it’s clearer because the application itself, a ground vehicle for instance, will probably always want a dual-antenna system.
That’s just one area where we try to provide fundamental understanding in the library, while the application notes tie that into how it impacts a particular application. We basically apply the principles found in the library to applications one-by-one so engineers can find clear, direct answers given their application.
IG: Breaking down your product line, can you tell us which applications each model is most ideally suited for? If you had to pick only one model for each application, and vice versa, say. As a way of better understanding the differences in what’s inside each unit, what their optimal capabilities are.
Jeremy: Hopefully the library and application notes provide a lot of those answers, but we can certainly break it down here. Our products can be categorized in a few different ways that are each helpful to narrow down what will work best in an application.
The first we’ve already talked about a bit: single vs dual-antenna GNSS/INS or even an AHRS or IMU. Which combination of sensing technologies and algorithms provide the best navigation solution for your application.
The second is performance level, whether it’s industrial-grade or tactical-grade inertial sensors. Let’s take our Industrial Series VN-300 and Tactical Series VN-310. The key difference comes down to the performance of the inertial sensors. It’s 4 or 5 times better in the VN-310 than the VN-300. We walk through that in the library and the application notes, both in terms of inertial sensor performance and how that corresponds to better attitude estimates. It isn’t so much what they can do, they both play roles in very similar applications. It’s the exact accuracies they provide, how well they can do it.
LiDAR surveying, for example, at low altitudes with a quadrotor UAV: the VN-300 is sufficient for many applications. But scaling up from 10 to 20 meters altitude to 100 to 200 meters above ground, you’re going to have to upgrade to tactical-grade performance, the VN-310. We tie the specifications for the sensor to the application notes. If this is the LIDAR-enabled drone you’re building, here’s how you decide which one makes the most sense.
 And lastly, you can break down our sensors based on whether they’re designed to be standalone, bolt-on sensors or deeply embedded in your system. The Tactical Embedded is extraordinarily small and lightweight, but in some UGV or manned ground vehicle applications the full-size Tactical series (the gray boxes) are better suited. They are IP68 rated and have been certified to a range of MIL-STD 1275E, 461, 810 and DO-160G and so they can tolerate the elements better. They don’t need to be embedded deep into a UGV’s electronics and weight may not be an issue.
And lastly, you can break down our sensors based on whether they’re designed to be standalone, bolt-on sensors or deeply embedded in your system. The Tactical Embedded is extraordinarily small and lightweight, but in some UGV or manned ground vehicle applications the full-size Tactical series (the gray boxes) are better suited. They are IP68 rated and have been certified to a range of MIL-STD 1275E, 461, 810 and DO-160G and so they can tolerate the elements better. They don’t need to be embedded deep into a UGV’s electronics and weight may not be an issue.
IG: Can you talk about the feature set of the new Tactical Embedded series and the operational domains for which they were designed?
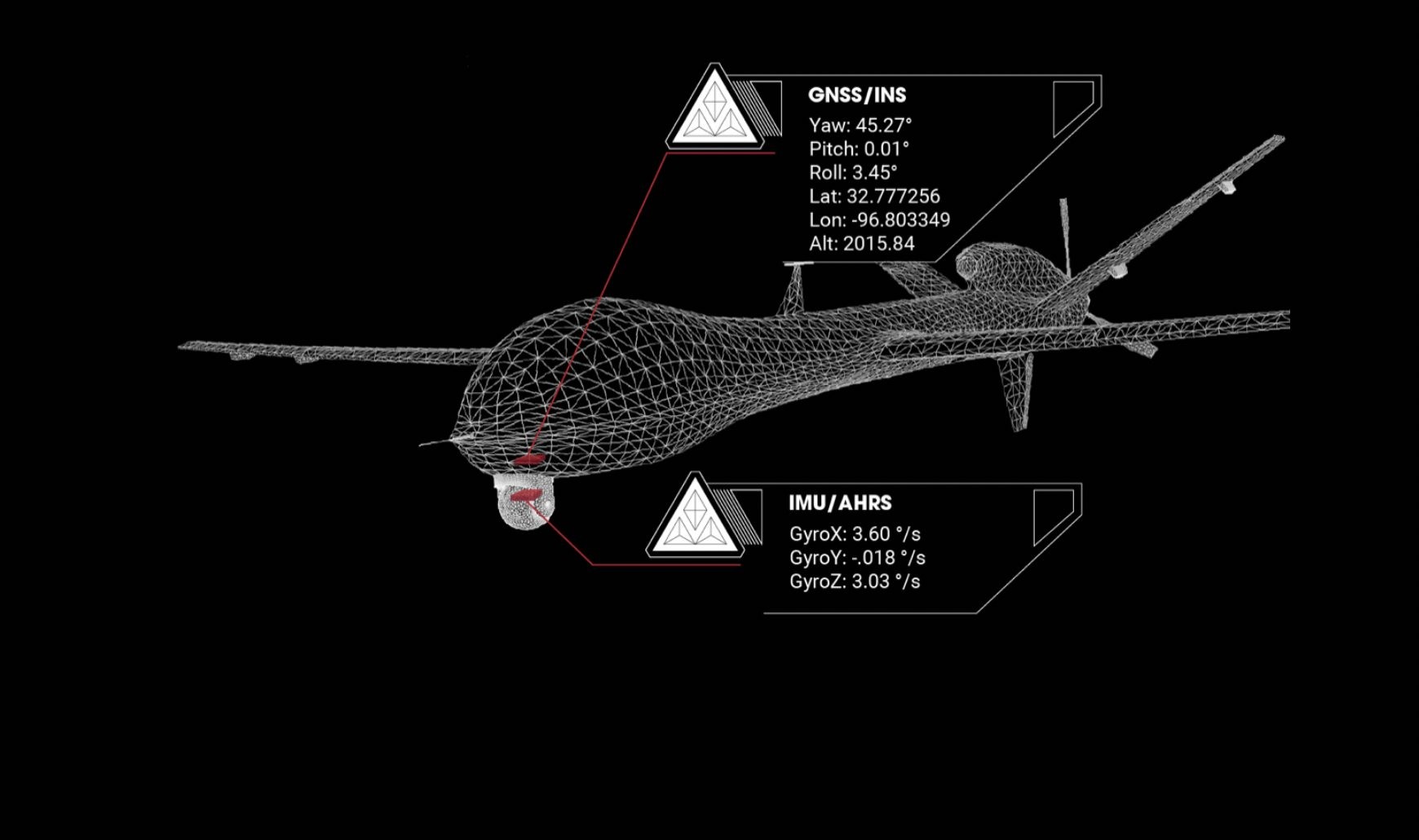
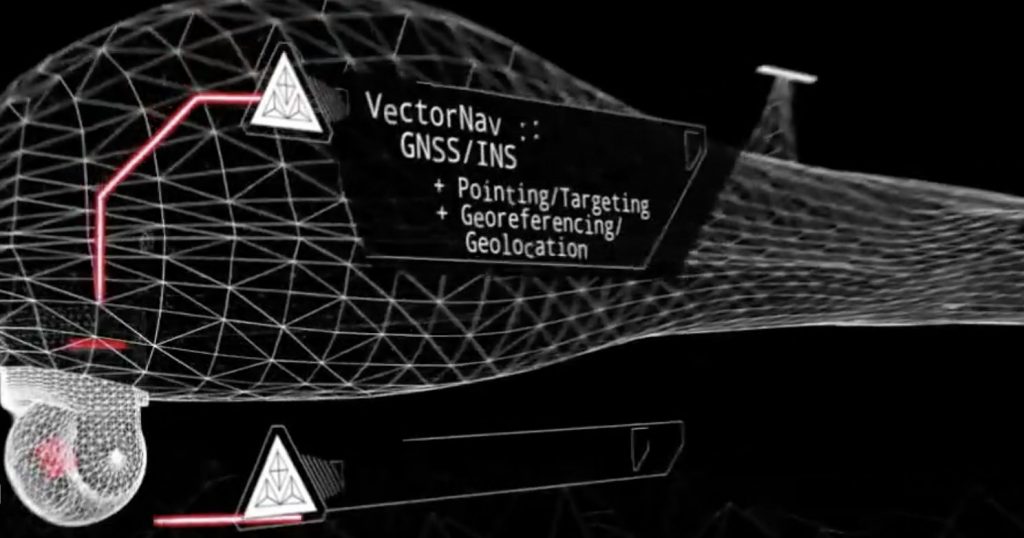
Jeremy: The Tactical Embedded is best suited for size, weight, power and cost- (SWaP-) constrained applications that require high-accuracy navigation or pointing capabilities. These are usually aerial autonomous systems and payloads for high-precision pointing, such as gimballed intelligence, surveillance, and reconnaissance (ISR) payloads, SATCOM antenna systems, etc. and direct georeferencing like LiDAR mapping and photogrammetry. It also supports external SAASM for defense applications in ISR, electronic warfare, munitions and UAV navigation.
The Tactical Embedded (VN-110E, VN-210E and VN-310E) delivers a level of tactical-grade performance in an unprecedented form factor. You can get down on weight, get down on power, and fly longer with a heavier payload that can see farther. The key thing with the embedded tactical line is the truly dramatic reduction in SWaP to achieve that tactical-level performance in a form factor that’s unparalleled. That opens up a lot of opportunities for applications where SWaP are limiting factors.
The small size and the embedded nature also allow you to place it exactly where you want it to be. For example, a marine survey vessel has a sonar unit below the water. Placing the inertial sensor right on the sonar head gives you much better accuracy than placing it somewhere else on the hull of the survey vessel. The Tactical Embedded enables applications and accuracy that you couldn’t achieve otherwise.
IG: The shifting performance thresholds, the increasing SWAP requirements, the sensor technology and the algorithms — this is all very useful content in the technical papers, showing how to optimize performance. But sensor performance, however excellent it may be, is limited by how it is deployed. Is that right?
Jakub: It’s been a very fundamental shift over the last 20 years. Up through the 1990s, the main inertial units out there were ring laser gyros, tens of thousands of dollars apiece, massive SWaP, very high cost, very accurate, for the most performance-demanding applications. As micro-electromechanical systems (MEMS) have developed, that has led to a sea change in what you can add inertial systems to. The industry has had to spend a lot of time figuring out what that means, what does that allow you to do now, that you couldn’t achieve before.
MEMS is really competitive now, in how you can use them. We can achieve performances and fulfill applications for which fiber-optic or ring-laser gyros were thought to be required just a few years ago. But it’s not just because MEMS have gotten better over the last decade, but also that you can get them at a small size and reasonable cost, and integrate them into small UAVs, for example. That revolution has allowed you to integrate inertial capability on things you would never think of before.
There’s a story there, the evolution of MEMS tech over the last couple of decades, enabling companies like us to bring high-performance inertial capabilities that can be integrated into a wide variety of platforms and applications. It’s enabled UAVs to do mapping and ISR. People are continuing to find opportunities in these spaces, in commercial and defense markets. They’re innovating new technologies and new types of systems. These are often new engineers, people who have been specialized in SATCOM systems or camera systems, or sonar, radar, all these kinds of things, that are now faced with the opportunity to develop a system with inertial capability, that didn’t have that opportunity before. The new technical content is tailored for system developers working in both familiar and unexplored situations. They come here and interact with us based on this content, and they become better versed to implement these technologies.
IG: So MEMS technology is a key to VectorNav’s success.
Jakub: Well, there’s been a lot of innovation in MEMS, but the other types of IMUs are still very useful and have their place. We know MEMS very well, but our core competency and capabilities are in inertial navigation and algorithms that are agnostic to the tools used to solve those problems. We have the ability to extract optimal positioning outputs from any type of positioning or inertial sensor, to deliver higher performance.
Tying that back to the brand message, we’re really agnostic to the inertial technology being used, the focus is on our inertial navigation capabilities. That’s what we want the brand to convey and represent, and the rich content we have on all these topics. The wealth of information and knowledge and passion we have about this subject. We want that to shine through.
Small MEMS sensors has been the primary tool, but we want to show that’s only one of the things in our arsenal that make us who we are. The brand is modern, forward-looking, and I think it conveys how much more we have to contribute to inertial navigation.



")
