Existing and future GNSS receivers must be able to operate reliably when multiple LEO PNT signals are present, with the opportunity for LEO PNT to become interoperable with GNSS MEO in the same way multi-constellation receivers use signals from different MEO GNSS systems today.
MATTEO PAONNI, ANDREA PICCOLO, LUCA CUCCHI, FRANCESCO MENZIONE, EUROPEAN COMMISSION, JOINT RESEARCH CENTRE (JRC), OTTAVIO M. PICCHI, EXTERNAL CONSULTANT FOR EC, JRC, STEFAN WALLNER, MARCO ANGHILERI, CÉSAR VAZQUEZ ALOCÉN, PIETRO GIORDANO, EUROPEAN SPACE AGENCY, OLIVIER JULIEN ADVISOR FOR EUROPEAN COMMISSION, DG DEFIS
Exploiting GNSS signals and services has been a major technical development of the last few decades, enabling a large variety of applications to use position, navigation and timing (PNT) information. Starting with GPS and followed by other global and regional GNSS, a multiplicity of signals is now available to worldwide users in the available spectrum allocations concentrated in the L-band. Radio-Frequency Compatibility (RFC)—a concept formally defined many years ago by the International Committee on GNSS (ICG) of the United Nations Office for Outer Space Affairs (UNOOSA)—has been a cornerstone for the coexistence of GNSS signals in any chipset or receiver. These systems can be exploited at user level to provide unprecedented position accuracy and availability, and in some cases even benefit from interoperable signals to achieve superior performance compared to what any single system can do on its own.
Implementing RFC among the GNSS is mostly left to the various system providers, which act upon provisions of the Radio Regulations, established under the International Telecommunication Union (ITU), such as Resolutions 609 and 610 [1,2]. Providers use well-established methodologies to assess compatibility, shaped over many years, that consider the specific characteristics of GNSS systems. These methodologies have been defined considering emissions from Medium Earth Orbit (MEO) and Geostationary Orbit (GEO) satellites, assuming typical power levels on ground within a certain range.
More recently, novel concepts have been developed to provide PNT signals from satellites in Low Earth Orbit (LEO), generally referred to as LEO PNT. These concepts include exploitation of frequency diversity by transmitting navigation signals in alternative frequency bands such as UHF, the Radio Determination Satellite Systems (RDSS) S-band, or Radio-Navigation Satellite Systems (RNSS) C-band. Most of these new systems also incorporate L-band signals to aid legacy user service adoption. Some LEO PNT initiatives have chosen signals in the L-band at received power levels comparable to classic GNSS, while others are considering significantly higher levels.
This, combined with the fact the world economy now relies heavily on GNSS, makes it crucial to assess the RFC of LEO PNT signals with the billions of terminals that have been designed to process signals transmitted from MEO and GEO satellites. Additionally, it is essential to verify the applicability of well-established methodologies to this new category of signals and systems, with different orbital characteristics and potentially significant variations in power levels at the user terminal input.
This article investigates Radio Frequency (RF) compatibility among LEO PNT and classic GNSS, focusing on the impact at user level and ways to ensure existing and future GNSS receivers will be able to operate reliably in the presence of multiple signals transmitted by LEO PNT systems. To ensure compatibility with existing GNSS, LEO PNT signals shall not cause harmful interference that degrades GNSS receiver performance, which is typically measured by the effective C/N0 level. We pay specific attention to RFC in L-band RNSS allocations, which is already densely populated by many regional and global PNT systems.
Compatibility as a Key Prerequisite for Interoperability
In the last 20 years, with the proliferation of global and regional GNSS, compatibility has been the central pillar to ensure these systems can be developed and operated without mutually interfering. GNSS providers have prioritized compatibility to ensure their coexistence and in 2007 agreed on a unified framework to define compatibility under the ICG, recognizing compatibility as a critical enabler of interoperability. By harmonizing technical standards and operational practices, the ICG laid the groundwork for global users to leverage multiple GNSS systems without compromising performance or reliability.
At its core, compatibility refers to the ability of space-based PNT services to function independently or in combination without causing mutual interference. This principle ensures signals from different GNSS systems can coexist in the RF spectrum while maintaining their individual characteristics and performance. For users, compatibility translates into robust, uninterrupted access to GNSS services, which is vital for applications ranging from aviation and maritime navigation to precision agriculture and autonomous vehicles. Achieving this requires meticulous coordination among GNSS providers to mitigate risks of signal degradation or service disruption.
A key driver behind this focus is the scarcity of RF spectrum allocations for GNSS. As the number of providers and their demand for spectrum grows, the RF bands reserved for satellite navigation face increasing congestion. This is particularly true for the so-called E1/L1 band (1559-1610 MHz) and E5 band (1164-1215 MHz) [3]. GNSS providers, therefore, must adopt a cautious approach to compatibility to safeguard these critical spectrum resources. This involves rigorous analysis of signal characteristics, orbital parameters and interference thresholds to prevent mutual degradation.
Assessing RFC is a multidimensional task that requires balancing technical, operational and regulatory considerations. The primary objective of RFC analysis is to protect GNSS users by ensuring signals can be processed effectively. This involves evaluating potential interference scenarios, modeling signal interactions, and defining mitigation strategies. Over the years, methodologies for RFC assessment have evolved to incorporate modeling tools and standardized assumptions, including a dedicated methodology established under ITU-R M.1831[4]. These include:
• Orbital and signal parameters: modeling of satellite orbits, signal structures (e.g., modulation schemes, bandwidths) and transmission frequencies
• Payload and antenna characteristics: modelling of relevant satellite payloads characteristics, including antenna radiation patterns and power levels
• User receiver models.
Two critical metrics are central to RFC computations: Spectral Separation Coefficients (SSC) and Aggregate Gain (Gagg). The SSC is the primary tool to assess the potential risk of interference between two signals due to their capability to share a frequency band efficiently.
The Gagg represents the equivalent gain to be considered when a certain power is transmitted by a satellite constellation with certain transmitting antenna characteristics and specific orbital parameters and received by a receiver with a representative antenna pattern.
Over the last 20 years, RFC assessments have focused on GNSS systems transmitting signals from MEO, which is commonly adopted by all global systems, and from GEO and IGSOs/HEOs, used by regional systems and satellite-based augmentation systems (SBAS). It is essential to ensure methodologies, standard assumptions and typical use cases are adequate once new systems are transmitting from LEO.
LEO PNT Key Differentiators
LEO PNT systems represent a transformative approach to satellite navigation, offering distinct advantages such as providing enhanced signal strength at ground level, which can be obtained more efficiently than from MEO altitudes thanks to the reduced distance to the final users and hence smaller free-space propagation losses. These constellations can also offer improved coverage in urban and high-latitude regions, therefore complementing traditional MEO constellations. However, these systems also introduce unique compatibility challenges that necessitate rigorous evaluation to ensure harmonious coexistence with existing GNSS.
LEO satellites operate at significantly lower altitudes than the MEO altitudes of traditional GNSS. This proximity to Earth enables LEO PNT systems to potentially ensure higher ground signal strength, which enhances signal robustness. However, this advantage comes with a critical caveat: High power levels from LEO satellites can interfere with legacy GNSS receivers, which are designed to operate with extremely weak signals from MEO satellites (typically in the range of –150 dBW to 160 dBW in the case of open, unobstructed reception).
The dynamic nature of LEO orbits introduces additional complexities for receiver design. LEO satellites move rapidly relative to Earth, resulting in significant Doppler shifts and short visibility periods. From a compatibility perspective, based on available information regarding forthcoming LEO PNT systems [9], the number of simultaneously visible satellites is expected to be higher than that of legacy GNSS. This results in an increased number of transmitters operating within the same spectrum bands.
Two scenarios warrant particular attention:
1. Impact on legacy GNSS users: The coexistence of high-power LEO signals with weak MEO signals in shared bands (e.g., E1/L1) could degrade legacy GNSS receiver performance. For instance, a LEO transmitter operating at +10 or even +20 dB in the E1 band could overwhelm a GNSS signal at –160 dBW, even with substantial spectral separation.
2. Compatibility for space users: LEO PNT systems also must avoid interfering with other space-based receivers in LEO, which often rely on GNSS signals for autonomous navigation and other critical functions.
The impact from high power might be (partially) mitigated through spectral separation and other specific measures, but the risk remains high, so all factors must be carefully assessed. Spectral separation represents a key design tool to minimize interference among two signals transmitted within the same band, and the choice of the carrier frequency remains highly critical. However, the spectrum currently allocated to RNSS is very crowded, and the possibility to have completely isolated signals is extremely limited, especially when transmitted at high power. In this condition, spectral separation is never corresponding to complete isolation and, as such, especially in the presence of very high power levels, the impact might still be relevant.
Spectral Separation
The RNSS E1/L1 band is increasingly congested with the presence of multiple signals from various global satellite constellations. Current band allocation is the result of decades of bilateral coordination, which has ensured highly compatible systems with good spectral separation among signals. It is aimed at enhancing interoperability among the systems, which often use the same carrier and spreading modulation. However, it is essential to note good spectral separation does not guarantee perfect signal isolation.
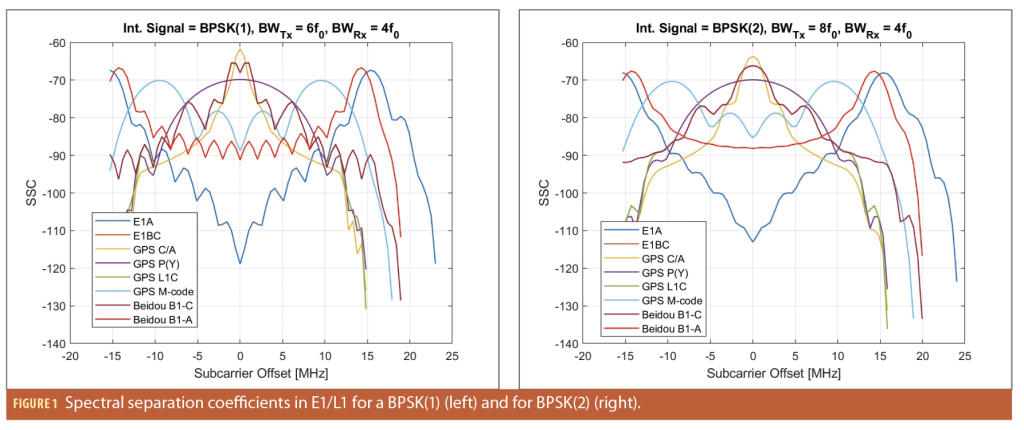
The Figure 1 left plot illustrates this concept, showing the spectral separation coefficients between existing GNSS signals transmitted by GPS, Galileo and BeiDou and a hypothetical additional BPSK(1) signal placed at various frequencies within the E1/L1 band. This plot presents the spectral separation coefficient for the BPSK(1) signal, while the right plot shows the same concept for a BPSK(2) signal. Both plots show how challenging it is to identify slots that ensure very high or high spectral separation with all existing signals in E1/L1, given the presence of a wide variety of signals transmitted in the band. In particular, the central part of the band is populated by several signals adopted for open services by most of the global and regional systems, while governmental signals from GPS, Galileo and BeiDou occupy higher frequency slots. Any offset between -20 and 20 MHz from the E1 carrier frequency results in an SSC above -80 dB/Hz with a given signal already transmitted in the band. It is important to note that even an SSC of -80 dB/Hz, which may seem low, corresponds to a certain degree of “non isolation,” which might become especially crucial in the case of a high power (or high aggregate gain) from the interfering signal/system. Leveraging spectrally efficient modulations, like what Xona plans to use, [5] can certainly help to improve the isolation.
Beyond the potential impact related with compatibility, the actual added value of high power for final users is to be well understood, as system self-interference is also to be accounted for. The combined (positive) effect of increased power needs to be adequately assessed against the increased self-interference to avoid a saturation of the effective signal to noise ratio when the amount of satellites in view increases.
Consideration of High-Power Systems
RF compatibility between a signal of interest delivered by constellation X and an interfering signal delivered by constellation Y relies on assessing the amount of noise created by inter- and intra-system interference. This noise is typically represented as an additional white noise at the correlator output that has a level equal to

Where
is the maximum received power of the interfering signals, assuming all constellation satellites transmit at that power;

is the Spectral Separation Coefficient (SSC) between the interfering signal and the local signal used by the receiver to process the useful signal;
is the so-called aggregate gain and represents a coefficient that accounts for the aggregation of the power of all the interfering signals (including the effect of the user antenna) affecting the user receiver.
At the end, the total equivalent noise that will affect the reception of the useful signal can be modeled as a White noise with the following level:

Where

is the thermal noise affecting the receiver;
are the number of signal types broadcasted by the constellation delivering the useful signal of interest and the equivalent noise generated by these signal types, respectively;
are the number of signals broadcasted by other constellations and the equivalent noise generated by these systems, respectively.
Self-Interference
Among the current GNSS signals used, let us look at GPS L1 C/A:
• It is one of the signals that leads to the highest SSC (-61.9 dB/Hz) regarding self-interference due to the frequency compactness of BPSK(1).
• Accounting for a typical Gagg for a global system of 11 dB in an open sky situation
• The typical maximum power for a GNSS system is in the order of -153 dBW.
Taking these values into account, GPS L1 C/A generates an additional equivalent self-interference White noise of about -203.9 dBW/Hz, which is slightly lower or equal to typical thermal noise (roughly between -200 and -204 dBW/Hz). Assuming the receiver thermal noise is at a level of -201.5 dBW/Hz, this means the GPS L1 C/A self-interference would increase the background noise (or equivalently, reduce the C/N0) by about 2 dB if it was the only source of interference.
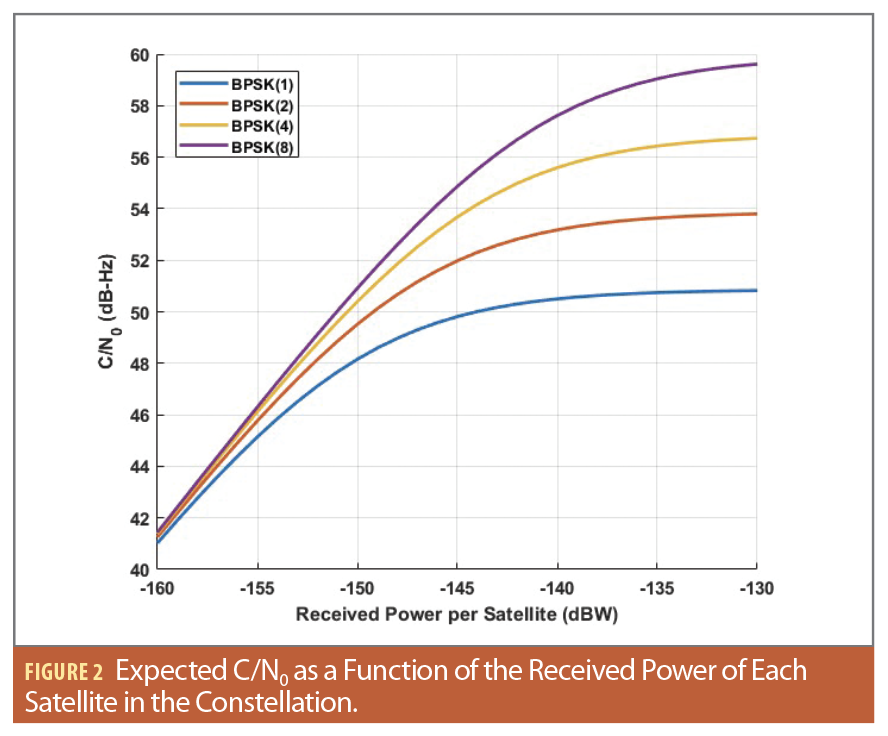
If the maximum received power of GPS L1 C/A was much higher, then self-interference would start dominating the thermal contribution. This would eventually result in background noise increasing at the same rate as the power of the useful signal. Figure 2 shows the expected C/N0 (not accounting for the gain brought by the user antenna on the useful signal) as a function of the maximum power of the GNSS signal for a variety of modulation. The C/N0 reaches a ceiling at some point due to self-interference. This ceiling depends on the modulation because each modulation will create a distinct SSC.
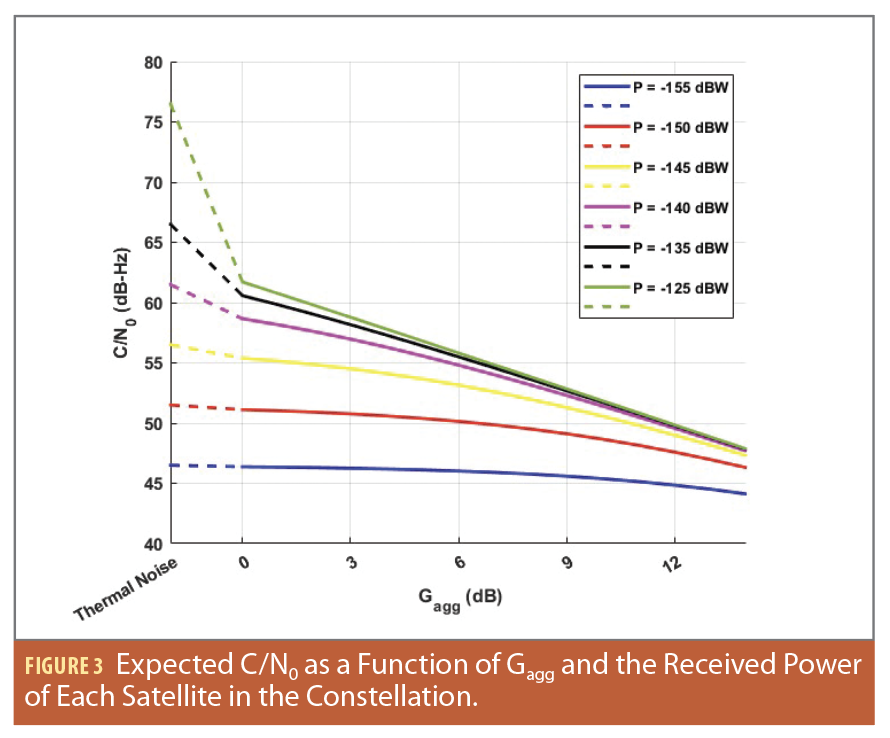
Another effect occurs during constellation build up. In this case, the amount of self-interference will also grow, which can be represented as a growth of the Gagg. This is illustrated in Figure 3 for a BPSK(1) signal. As the Gagg increases, the C/N0 decreases. To better understand this figure, a Gagg of 3, 6 and 9 dB can be seen as equivalent to receiving one, two and four signals, respectively, at the indicated received power. For a high-power constellation, this decrease can be relatively steep, depending on the type of signal used.
Figures 2 and 3 highlight that high power signals might not lead to the expected high C/N0 for a typical MEO or LEO constellation in open sky situations. This has implications regarding the quality of the measurements, which would not be as improved compared to a “normal” system. Still, there are advantages to such high-power signals:
• If the receiver is not in an open sky situation, fewer satellites will be in view. This is equivalent to reducing the self-interference through a lower Gagg. So, in this case, the C/N0 at receiver level would become higher, as shown in Figure 3.
• There is still a better resistance against interference compared to “normal” signals because this interference would need to be more powerful to have an effect on the C/N0.
Finally, in a complicated environment where some signals will be received with a high C/N0 while others are severally attenuated, it is possible the power difference between both types of signals becomes significant. Imagine a signal at 70 dB-Hz and another at 25 dB-Hz. Even though the power difference is 45 dB, both could be tracked. However, unless the isolation of the spreading codes is extremely good, the cross-correlation due to the signal with a high C/N0 will be higher than the auto-correlation of the weak signal, thus making it difficult or unreliable to acquire/track the weak signal.
Sharing the Band
The previous section only considered self-interference, as if there was only a single constellation. However, many GNSS systems share the L-band. This brings diversity to users and requires compatibility. This means we must consider that users will not only suffer from self-interference, but also interference from other systems. If we consider these are only global systems with a Gaggof about 11 dB, then the level of additional noise created by these interferences will depend on the number of interfering systems, the power of the interfering signals and the SSC between signals.
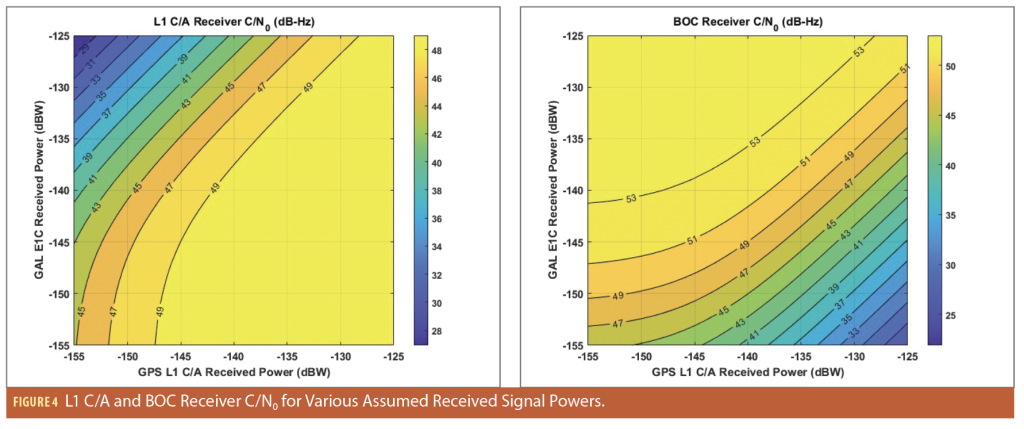
Take the example of the compatibility between GPS L1 C/A and Galileo BOC(1,1) signals. Figure 4 represents the expected C/N0 (not considering the effect of the receiving antenna on the useful signal) for a L1 C/A receiver and for a BOC receiver for a plurality of received powers for both signals (all signals of the constellation are assumed to have the same received power). Increasing the power of one of the two signals is always detrimental to the other; the area where both signals have a good C/N0 is somewhere around the diagonal. Thus, it makes sense for the power of both signals to be roughly the same. So, if there’s a high-power signal in part of the band, other signals broadcasting there have to use high power signals, unless they are isolated spectrally.
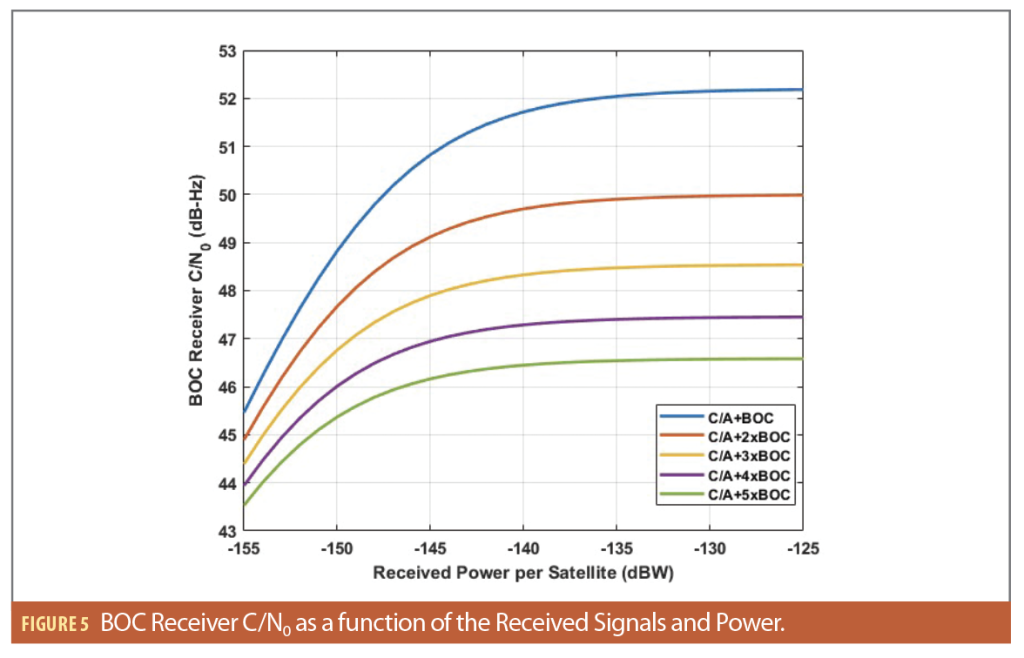
In reality, more than two signals or systems are typically considered in similar frequency bands, thus facilitating interoperability. Imagine there are three systems (for instance GPS/Galileo/BeiDou) all broadcasting BOC signals (data and pilot) for interoperability reasons, as is the case currently at 1575.42 MHz. Assuming all signals have roughly the same received power and Gagg, Figure 5 shows using high power signals would result in a higher loss on the C/N0. This leads to a situation in which the C/N0 is not so different between high power signals and “normal” signals (3dB difference in C/N0 for a difference in the received power of 30 dB). This shows the current situation is well adapted and optimized for compatibility and interoperability. Note the band around 1575.42 MHz is even more crowded as it contains signals from GPS, Galileo, BeiDou, QZSS, NavIC, SBAS, etc. In such a situation, it is questionable whether it makes sense to have high power signals.
The Case of LEO GNSS Space Users
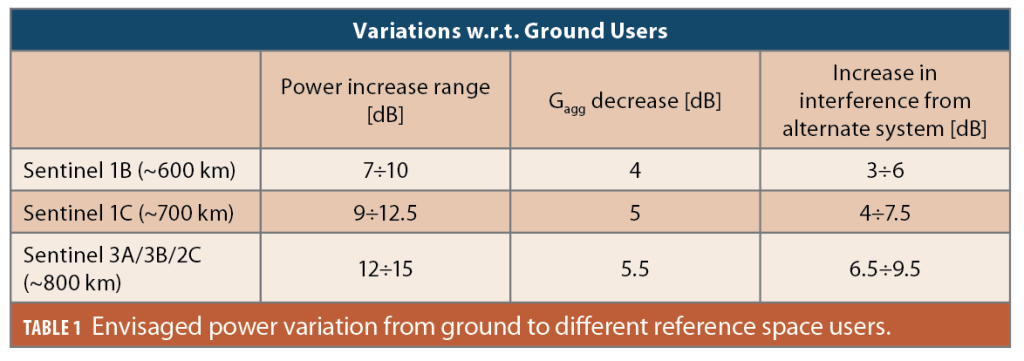
In traditional GNSS operated from MEO satellites, space-based users experience similar signal reception characteristics to ground users in terms of received power, Gagg, and C/N0 degradation. This assumption no longer holds when GNSS is operated from LEO satellites, which are slightly above the altitude of space-based users. To evaluate the power variation, Table 1 analyzes individual contributions for a reference ground user and three GNSS space users at different altitudes, corresponding to three EU Copernicus Sentinel satellites currently flying at about 600, 700 and 800 km, respectively [6]. The single satellite power increase was computed by accounting for the reduced path loss, while the Gagg was computed assuming the receivers move on a sphere with a radius equal to the sum of the Earth’s radius and the victim satellite’s altitude. As the space user approaches the interfering constellation orbit altitude, the number of simultaneous interfering satellites decreases, leading to a reduced Gagg. By combining the single satellite power increase with the reduced Gagg, we can determine an approximate increase in interference power from the alternate system a space user would experience with respect to a ground user. Table 1 shows that, for Sentinel 3A, the interference increase can be up to nearly 10 dB. This increase might have significant implications for GNSS receiver performance. This kind of impact should be carefully considered in the design and operation of LEO-based GNSS systems.
Interference Impact on Space Receivers
The risk of interference from an alternate system on GNSS signal reception can be significant when the system transmits from LEO orbits instead of MEO.
An increasing number of space missions use GNSS space receivers for constellation management and to provide their services. Earth observation satellites like the Sentinels of EU Copernicus system use Precise Orbit Determination (POD) [7] based on GNSS observables for georeferencing their images; communication satellites like Starlink and OneWeb might take advantage of GNSS reception for timing and pointing their inter-satellite links as well as for beam pointing. For scientific missions like GRACE-FO, Swarm and ICESAT-2, GNSS POD is required to perform the measurements.
A higher noise floor caused by receiving high-power navigation signals from LEO would cause GNSS space receiver accuracy to degrade, with a direct impact on these missions.
The undesired effects are a degradation in the quality of data provided as well as issues in data distribution among satellites caused by poor inter-satellite network synchronization. Also, constellation management and collision avoidance manoeuvres rely on the accuracy of GNSS-based measurements and would suffer in harmful interference scenarios.
On top of this, there is another category identified as “super-users” who exploit GNSS for operations and service provisions. Notably, LEO PNT providers operate in the low Space Service Volume (SSV) and LEO region [8] at an altitude that exceeds several LEO missions. LEO PNT systems with a constellation altitude lower than one of the alternate systems might be heavily impacted on GNSS signal reception. LEO PNT relies on GNSS signal measurements for several key navigation payload functions. Unlike other GNSS, the Orbit Determination and Time Synchronisation function is not based on the observables collected by a ground network of receivers, but is largely based on space receiver measurements which, depending on the particular architecture, are processed on-board the satellite or downlinked to the ground segment to compute the LEO PNT satellite’s accurate orbit and clock.
This information is used by the on-board timing subsystem to estimate the offset of the onboard clock with respect to GNSS time (and possibly steering the clocks to the desired timescale) as well as to estimate the satellite orbit and generate the navigation message parameters to be broadcast to LEO PNT users to compute their PVT solution.
In [9], Earth Observation Copernicus Sentinels are considered critical GNSS users in space. In the paper, a visibility analysis assesses the potential impact “super-users” might be subject to and focuses on ensuring uninterrupted operation of these critical space-based assets. It also demonstrates how the potential risk is not related to short or temporary “collisions,” but rather the continuous exposition to a potentially very high amount of interference from a relatively short distance.
Therefore, degraded GNSS space receiver accuracy caused by interference can significantly impact the quality of the generated LEO PNT signals as their frequencies, PRN codes, navigation message timestamps and orbit and clock corrections are all based on it.
Degradation of GNSS space receiver accuracy would result in a higher value of the Signal-In-Space-Error contribution and a degradation of the PVT solution computed by users.
An Example of Interference in Space
Through the Copernicus program, The European Union (EU) is operating a fleet of Earth Observation satellites, referred to as Sentinel satellites. The satellites embark GNSS space receivers that provide Galileo and GPS code and phase iono-free measurements for POD and Time Synchronization (TS).
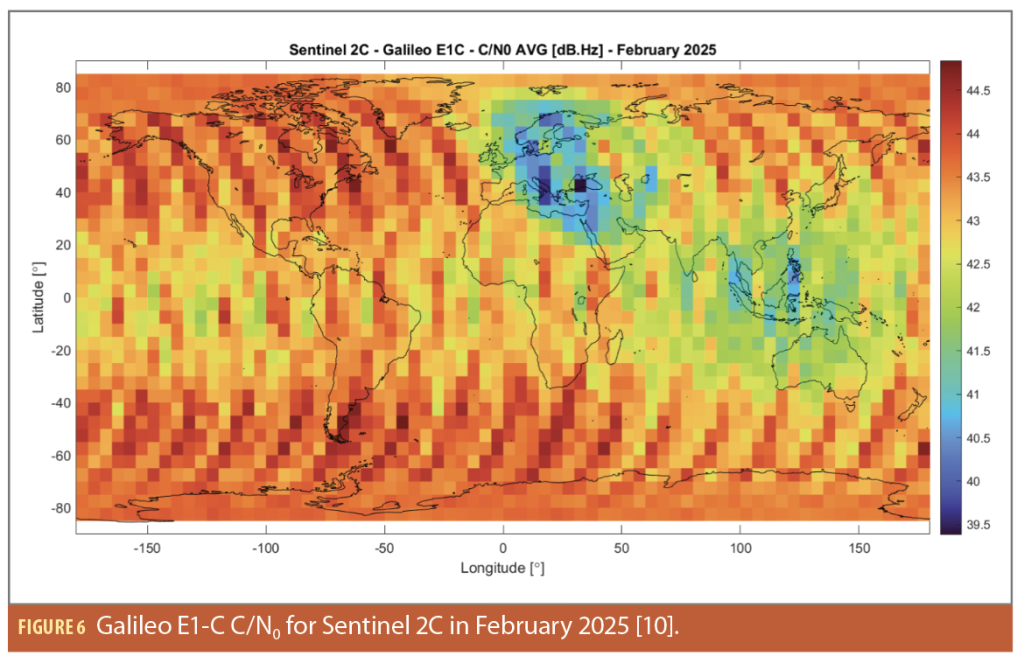
The detailed assessment in [10] showcases how ground based interference is measurably impacting space receivers on LEO satellites, although the GNSS antenna is mounted on the relevant satellites facing in zenith direction. The interference originates from the ground and affects a short portion of the satellite’s trajectory. In a future scenario, a comparable level of interference may originate from satellites emitting RNSS signals at a slightly higher altitude compared to the Earth observation satellite. In such a case, the direction of the interference would align with the pointing of the Earth Observation’s GNSS antenna; no favourable low gain of the antenna would reduce the level of interference.
Figure 6 shows the C/N0 average as measured by the Sentinel 2C on-board GNSS receiver for the Galileo E1-C signal component as a function of the satellite’s ground track in February 2025.
A clear reduction in C/N0 over eastern Europe can be identified. It ranges up to a level of approximately 4 dB. This reduced C/N0 can be attributed to the jamming events occurring over the corresponding region.
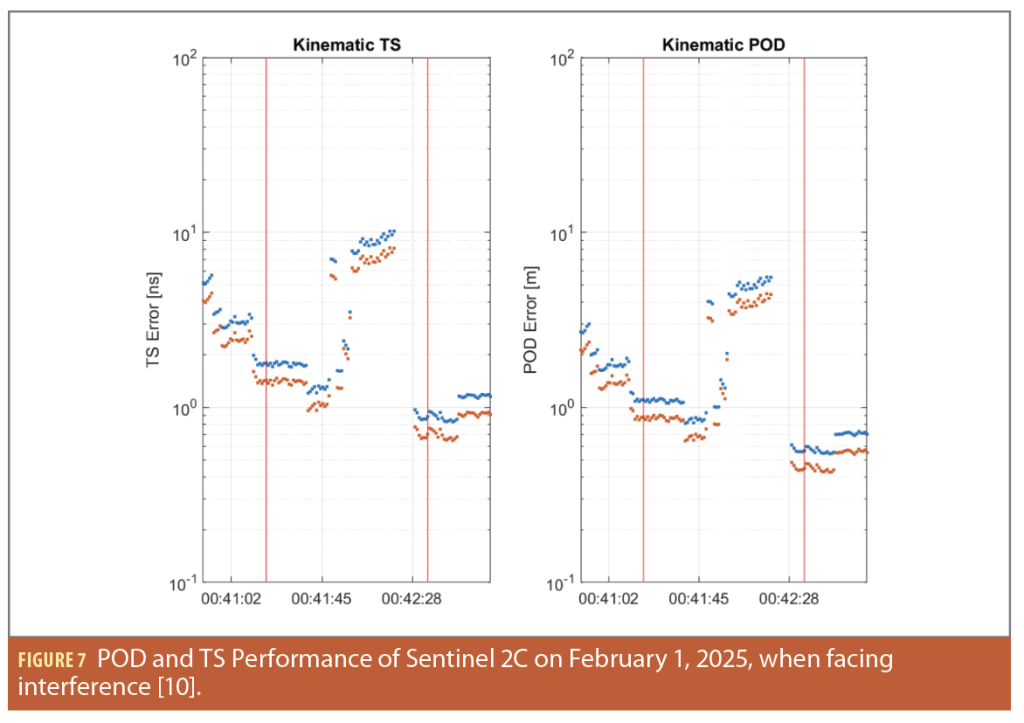
The impact of the interference event on February 1, 2025, on the real-time PODTS (in blue for the broadcast products and in orange for the Galileo High Accuracy Service (HAS) [11] products) is shown in Figure 7. The red vertical lines indicate the start of the interference event. The plots show the kinematic TS and POD performance respectively. The error increases in both cases until the number of satellites is not sufficient to compute position or time. The kinematic method cannot cope with measurement gaps (in this case only four satellites were available). The impact of the interference on both POD and TS is clearly evident.
Conclusions
The use of high-power signals transmitted from LEO satellites can provide interesting performance benefits when considered in isolation. However, when multiple systems transmit signals in the same frequency slot, it can lead to interference and performance degradation. To avoid this, most systems would need to use high-power signals, which would ultimately lead to a decrease in overall performance and hardly sustainable spectrum consumption.
A careful approach to compatibility has been a fundamental factor to ensure protection of the very scarce and increasingly crowded spectrum allocations available to GNSS providers.
• GNSS providers adopted key principles for open/commercial signals in L-band
• Sharing the band without exclusive use of a spectrum portion
• Interoperability at user segment level is enabled by compatibility at system level.
The risk of a “power race” among commercial providers in legacy GNSS bands (E1/L1 and E5/L5) could disrupt these practices and penalize legacy users as well as future providers willing to access the spectrum. Among various risks, a power escalation could prevent other providers from using this part of the band without significant degradation.
The exploitation of GNSS by space users in LEO poses a significant risk, particularly for space service users like the Copernicus Sentinels. These aspects must be carefully assessed, and the case of space users should be studied in detail when evaluating compatibility between MEO GNSS and LEO PNT systems.
It is essential that all new LEO PNT providers ensure a sustainable approach to spectrum. Multilateral fora, such as the International Committee on GNSS (ICG), and GNSS providers can help build guidelines to ensure long-term sustainable spectrum access for the benefit of users and potential future providers.
Regulatory elements, such as ITU Resolution 609 and Recommendation 608, exist to help keep the level of interference low and prevent one system from dominating the available margin to the emission limit. These instruments are essential for ensuring spectral sustainability and should be respected by all operators.
Acknowledgements
This article is based on material presented in a technical paper at ION GNSS+ 2025, available at ion.org/publications/order-publications.cfm.
References
(1) Resolution 609 (Rev.WRC-07) Protection of aeronautical radionavigation service systems from the equivalent power flux-density produced by radionavigation-satellite service networks and systems in the 1 164-1 215 MHz frequency band, RES609-1 (2007). https://www.itu.int/en/ITU-R/space/Res609%20CM%20Documents/RES-609_e.pdf
(2) Resolution 610 (REV.WRC-19) Coordination and bilateral resolution of technical compatibility issues for radionavigation-satellite service networks and systems in the frequency bands 1 164-1 300 MHz, 1 559-1 610 MHz and 5 010-5 030 MHz, RES610-1 (2019). https://www.itu.int/en/ITU-R/space/Res609%20CM%20Documents/RESOLUTION%20610%20(Rev%20WRC-19).pdf
(3) European Union. (2023). European Union, Galileo Open Service Signal-In-Space Interface Control Document (OS SIS ICD). https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.1.pdf
(4) Recommendation ITU-R M.1831-1 (09/2015) A coordination methodology for RNSS inter-system interference estimation, M.1831-1 (09/2015) (2015). https://www.itu.int/dms_pubrec/itu-r/rec/m/R-REC-M.1831-1-201509-I!!PDF-E.pdf
(5) Reid, T. G. R., Neish, A. M., Walter, T., & Enge, P. K. (2018). Broadband LEO Constellations for Navigation. NAVIGATION, 65(2), 205–220. https://doi.org/10.1002/navi.234
(6) Sentinel Online. (2025). Copernicus Programme. https://sentinels.copernicus.eu/web/sentinel/copernicus
(7) European Union. (2025). Copernicus Operations—POD in details. https://sentiwiki.copernicus.eu/web/precise-orbit-determination
(8) FrontierS. (2024). State of the Market Report, Low Earth Orbit Positioning Navigation and Timing–2024 Edition. frontiersi.com.au
(9) Paonni, M., Picchi, O. M., Piccolo, A., Cucchi, L., Menzione, F., Wallner, S., Anghileri, M., Alocén, C. V., Giordano, P., & Julien, O. (2025). On the Compatibility of GNSS User Segment with Emerging LEO-PNT Systems and Signals. Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), 915–928. https://doi.org/10.33012/2025.20406
(10) De Oliveira Salguiero, F., Lapin, I., Cordero Limon, M., Caparra, G., & Garcia Molina, J. A. (2025, September). Impact of Ground-Based Interference on GNSS Space Receivers On-Board LEO Satellites. Proceedings of the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024).
(11) European Union, ‘European GNSS (Galileo) High Accuracy Service Signal-In-Space Interface Control Document (HAS SIS ICD)’. (2022, May). https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_SIS_ICD_v1.0.pdf.
Authors
Matteo Paonni is Deputy Head of the Space, Connectivity and Economic Security Unit at the Joint Research Centre of the European Commission in Ispra, Italy. He coordinates JRC technical and policy support to the EU Satellite Navigation Programmes within the European Commission. Matteo is also the chairman of the Galileo 2nd Generation Signals Task Force (G2G-STF), established under the EU Space Programme. Before joining JRC in 2013, he was a research associate at the Institute of Space Technology and Space Applications at the University of the Federal Armed Forces in Munich.
Ottavio M. Picchi holds an MSc in Telecommunications Engineering and a Ph.D. in Information engineering, both from the University of Pisa. Since 2012, he has worked in signal processing for communications and navigation. He is an external consultant for the European Commission’s Joint Research Centre, focusing on Fused PNT systems, 5G NTN, IRIS2 and RF compatibility.
Andrea Piccolo is a Technical and Scientific Officer at the European Commission’s Joint Research Centre in Ispra, Italy. His specialties include GNSS spaceborne receivers, space service volume, LEO PNT, Galileo PRS, and developing new Galileo services. He graduated with an M.Sc. in Telecommunications Engineering from Politecnico di Milano in 2014. He worked as a Radio Navigation System Engineer at Thales Alenia Space Italy, focusing on GNSS Spaceborne receivers and Galileo Navigation Signal Generation Unit (NSGU) product development from 2015 to 2023.
Luca Cucchi is a GNSS Security and Galileo PRS Security Officer at the Joint Research Centre (JRC) of the European Commission in Ispra, Italy. He coordinates the activities of the JRC Galileo PRS User Segment Laboratory and provides support to the Directorate-General for Defence Industry and Space (DG DEFIS) and EU Agency for the Space Programme (EUSPA) on Galileo Program activities. He has 14 years of experience in the private sector as a radio navigation engineer, primarily focusing on the Software Defined Radio approach. He earned his Master’s Degree in Telecommunication Engineering from the University of Pisa in 2005.
Francesco Menzione received a master’s degree (2012) and Ph.D. (2017) from the University of Naples Federico II in Aerospace Engineering and Satellite Navigation. From 2012 till 2021, he worked in the aerospace sector as a navigation and control engineer. In 2021, he joined European Commission’s Joint Research Centre as Technical and Scientific Officer. In this role, he provides technical and project management support for various DEFIS-funded studies and research areas, with a focus on Precise On-Board Orbit Determination using HAS, Space Service Volume, LEO-PNT, Hybrid PNT, 5G-NTN, LEO-based RFI monitoring, and GNSS-based remote sensing.
Stefan Wallner is the Head of the Galileo Signal-in-Space Engineering Unit within the Navigation Directorate at the European Space Agency. He graduated with a Diploma in Mathematics from the Technical University of Munich and was research associate at the University of the Federal Armed Forces in Munich. He has worked at the European Space Agency since 2010 and is responsible for the Galileo Signal in Space and Performance Engineering activities within ESA.
Marco Anghileri is the satellite Payload Manager of Celeste, ESA’s program for satellite navigation in Low Earth Orbit. He has more than 20 years of experience in satellite navigation across academia, industry and the European Space Agency. He began his career in 2005 at the Universität der Bundeswehr München, contributing to Galileo signal innovations later adopted in both first- and second-generation systems. He served as Lead Systems Engineer and Project Manager at IFEN GmbH and Airbus Defence and Space, where he led international R&D activities on future GNSS signals and system architectures for ESA and the European Commission. From 2021 to 2025, he was part of ESA’s GNSS Evolution team, conducting LEO-PNT system studies and technology R&D activities, while also taking responsibility for frequency management and security in the evolution of Galileo and EGNOS.
César Vázquez Alocén holds a M.Sc in industrial engineering from the University of Alcala (Spain). Since 2018 he has worked at ESTEC (ESA) in different roles, mainly working on GNSS signal design, signal processing algorithms and receiver testing activities, supporting several ESA navigation programs including Galileo and LEO PNT.
Pietro Giordano covers the role of LEO PNT system manager at the European Space Agency. Previously, he worked in Thales Alenia Space Italy before joining ESA/ESTEC in 2009. He worked several years within the Galileo project covering many roles, from user segment to operations, and in the ESA technical directorate as overall coordinator for spaceborne GNSS and space PNT technologies. He has been in charge of the definition and coordination of the European technology harmonisation roadmap for on-board radio navigation receivers and he supported Earth observation programs (e.g.: Copernicus/Sentinel). He contributed in the development of new concepts such as real-time on-board autonomous POD (P2OD concept), LEO PNT payloads, definition of new spaceborne GNSS receiver components (e.g.: AGGA family ASIC) and use of GNSS signals for lunar autonomous navigation. He was the chain lead for the navigation services within the ESA Moonlight program.
Olivier Julien is an advisor to the European Commission DG DEFIS on EU Satellite Navigation Programs where he supports the EU new initiatives on navigation and radio-frequency matters. From 2019 to early 2025, he was a Senior Principal Engineer in the Positioning technology team of u-blox (Switzerland). Before that, he was the head of the Signal Processing and Navigation research group of the TELECOM laboratory of ENAC (France). He received his engineering degree from ENAC and his Ph.D. from the University of Calgary (Canada).




