
With the rethinking of the Galileo Commercial Service (CS), the E6B signal will disseminate Precise Point Positioning (PPP) corrections whereas the E6C component will be encrypted for authentication purposes. Different processing options for the E6 signals are investigated and it is shown that the sensitivity gap between data and pilot processing can be bridged by introducing non-coherent integrations and inter-frequency aiding. Extended integrations mitigate the impact of noise while inter-frequency aiding reduces the dynamics perceived by the E6B tracking loop.
After the rethinking of its Commercial Service (CS), Galileo will offer High Accuracy (HA) corrections that will be disseminated through the E6B signal. As stated in Commission Decision (EU) 2018/321 and discussed in the article by P. Gutierrez listed in Additional Resources, it will be possible to achieve accuracies in the order of a few decimeters (approximately 20 centimeters) without the need for ground communication infrastructures or for base stations providing differential corrections. In this way, the user will be able to access measurements from a third frequency and enjoy the benefits of a signal with intermediate characteristics between the AltBOC and the Galileo E1 Open Service (OS) modulation. While the E6B signal, which is modulated by a 1 ksymbol/s navigation message, will provide Precise Point Positioning (PPP) corrections, the E6C component will be encrypted so to render the signal robust against spoofing attacks and will be used to provide an authentication service. In this way, it will not be possible to use the E6C signal as a pilot component for most users. Although the presence of a pilot component can provide increased receiver sensitivity (see for example the papers by Curran et Melgard 2016 and Göhler et al. 2016, Additional Resources), specific approaches exist to improve the performance of data-only processing. Moreover, Galileo satellites broadcast several pilot components in frequency bands different from the E6 one. These pilot components can be used to improve the processing performance of the E6B signal when the E6C component is unavailable.
In this article, the authors investigate different processing options for the E6B signal and analyze different data-only tracking strategies, which take advantage of pilot components from different frequencies and operate in the presence of fast bit/symbol transitions.
The analysis is performed using a combination of Commercial Off-The-Shelf (COTS) and Software Defined Radio (SDR) receivers. In this respect, an E6B/C capable SDR receiver was developed to test different tracking schemes for the processing of the E6B signal, which was considered in standalone mode or in combination with the Galileo E1 pilot component. The results provided by a COTS receiver implementing E6C pilot processing were used as comparison term for the findings obtained using the SDR receiver.
For the analysis, three types of scenarios were considered: static open-sky conditions, a simulated test with progressively decreasing Carrier-to-Noise Power Density Ratio (C/N0) conditions and live dynamic experiments conducted in the presence of foliage and building blockage. The data collected under open-sky conditions were used to verify the proper functioning of the SDR receiver and to provide an initial comparison with the results obtained using the COTS receiver. The tests performed using a hardware simulator were conducted to determine the sensitivity limits of the different tracking approaches in the presence of noise alone. This type of test was also used to analyse the E6B demodulation performance and to determine the associated Bit Error Rate (BER). Finally, dynamic tests were used to analyze the receiver performance in a challenging, realistic environment.
While pure pilot processing is the most effective approach for reducing the impact of noise, the analysis shows that the sensitivity gap between data and pilot tracking can be effectively compensated by implementing high-sensitivity tracking approaches and by adopting inter-frequency aiding that reduces the dynamics perceived by the E6B tracking loop.
E6B Tracking Approaches
Different approaches exist for tracking the E6B signal and increasing the receiver sensitivity even in the presence of bit transitions. In particular, two problems need to be solved: 1) increase the integration time taking into account possible bit transitions and 2) reduce the signal dynamics perceived by the tracking loop. We have tackled these problems using extended integrations and inter-frequency channel aiding. A general scheme representing the tracking approach adopted in this paper is depicted in Figure 1 that shows a tracking loop implementing additional integrations after data symbol removal and implementing inter-frequency aiding. The figure only describes the Phase Lock Loop (PLL) that is considered as the weakest element of signal tracking. A similar processing scheme is adopted for the Delay Lock Loop (DLL) that also implements long integrations. The E6B signal, yE6B[n], is at first multiplied by the E6B local code generated by the DLL. In the following, we will assume that analog GNSS signals have been filtered, amplified, down-converted and digitized by the receiver front-end. Thus, yE6B[n], is the digital sequence obtained at the output of the receiver front-end sampled with a sampling frequency, fs. The variable n, is the time index.
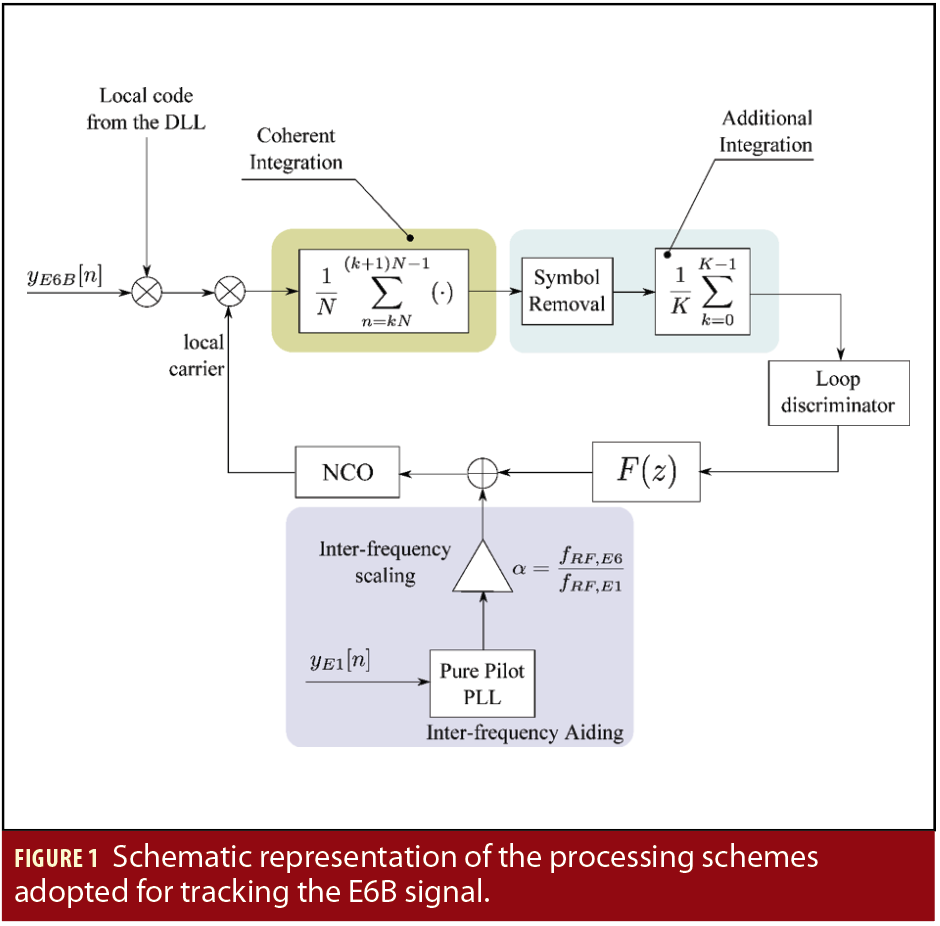
The E6B signal, yE6B[n], is also multiplied by the local carrier generated by the PLL using previous estimates of the Doppler frequency and signal carrier phase. After code and carrier removal, the signal is integrated for 1 millisecond (ms), i.e. the duration of one E6B code period. In this way, the prompt correlator outputs, Pk, is obtained. Index k is used here to indicate the 1 ms epochs corresponding to each code period. The correlators, Pk, are modulated by the E6B navigation message and thus cannot be further integrated without removing at first the data symbols. In general, the removal of the navigation message is performed by multiplying the prompt correlator outputs by a quantity, Sk, proportional to the data symbols. In particular, an extended correlator output is obtained as: 
We have considered two forms of extended integrations:
• non-coherent integrations (see the paper from Borio and Lachapelle,Additional Resources), where the effect of the data navigation message is removed through squaring, and
• Decision Directed (DD) PLL (a description of the associated principle can be found in the classic book from Meyer and Ascheid on Synchronization): where the data symbols are estimated directly from the correlator outputs and removed to further extend the integration time.
In the non-coherent case, 
whereas in the DD case, 
i.e., Sk is the sign of the real part of the prompt correlator. The extended correlator, Pext, is used to compute the PLL discriminator output that, after filtering, is used to drive the Numerically Controlled Oscillator (NCO) and generate a new replica of the signal carrier for the next processing epoch of the PLL. In this article, we considered standard Proportional-Integrate (PI) filters used for smoothing the PLL discriminator output. Other approaches, for example based on the Kalman Filter, can be used.
The signal dynamics perceived by the PLL is reduced by injecting an estimate of the Doppler frequency at the output of the loop filter, indicated in Figure 1 by its transfer function, F(z). This estimate is obtained by scaling the Doppler frequency estimated from another signal transmitted by the same satellite. In this work, we considered the case where both E1 and E6 signals are processed at the same time. The Doppler frequency estimated from the E1C signal, which is a pilot component, is scaled by 
Frequency aiding reduces the actual dynamics that the E6B tracking loop has to track. More specifically, when frequency aiding is implemented, the E6B PLL only needs to track the residual frequency difference between the E1 and the E6 signals. These frequency differences may be caused by ionospheric propagation and by residual effects due to different implementations in the E1/E6 transmission and reception chains. More details on the processing implemented for the E6B signal can be found in our paper presented at the 2018 ION GNSS+ conference (see again Borio and Susi 2018, Additional Resources).
In addition to the non-coherent and DD PLL, the authors have considered pure pilot processing as a comparison term. Note that pure pilot processing also can be represented according to the general scheme provided in Figure 1. In this case, Sk, is the secondary code value corresponding to the specific correlator output and known after secondary code synchronization. Results for pilot processing have been obtained using our custom SDR receiver and the COTS device that implements this type of approach. Pure pilot processing is obtained using the E6C signal that will be encrypted.
Experimental Setup
Three sets of tests were performed to assess the approaches described above:
• static live E6B/C signals collected under open-sky conditions using a rooftop antenna,
• simulated data using a hardware Radio Frequency (RF) simulator,
• live signals collected under dynamic conditions using an antenna mounted on the roof of a van.
The first type of tests was performed to tune the processing implemented by the SDR receiver and compare the results obtained with that achieved using the COTS receiver. The signal from the rooftop antenna was split between the SDR front-end and the commercial receiver.
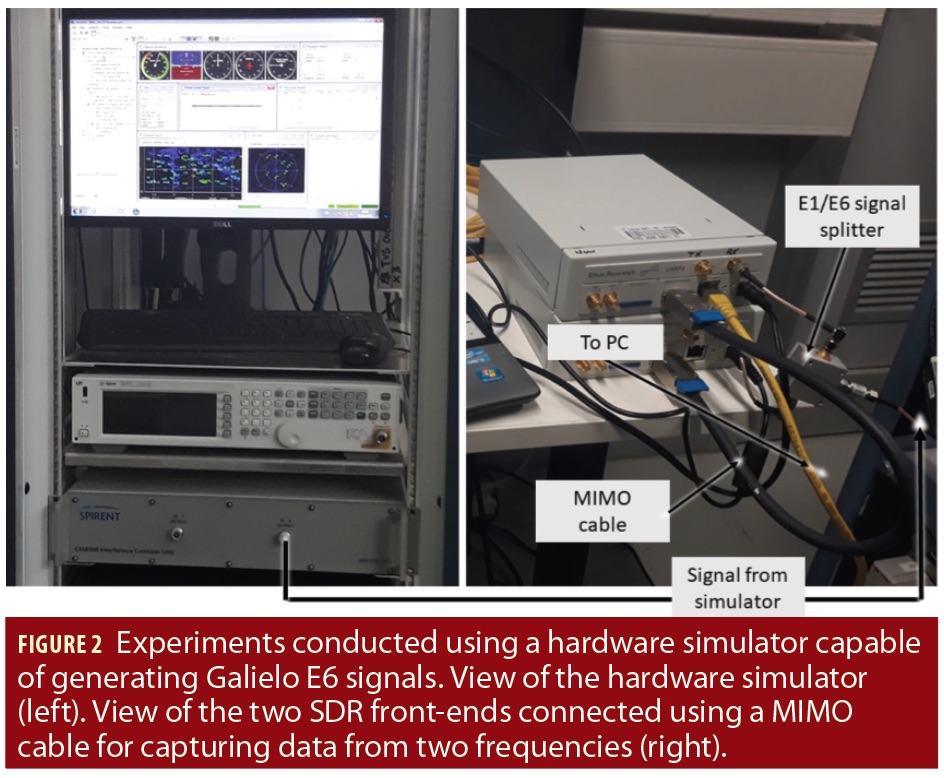
The use of a hardware simulator for the second type of tests allowed us to collect signals in a controlled environment considering only the effects of noise and of the front-end local oscillator. A scenario where the C/N0 of all the signals was progressively reduced was considered. The signals generated by the hardware simulator were provided to two SDR front-ends and to the COTS receiver.
For the SDR case, commercial SDR front-ends with a poor local oscillator were used for data recording. The built-in clocks of these platforms have biases of about 10 kilohertz with respect to the Galileo E6 centre frequency (about 8 parts per million (ppm)) and large frequency drifts. This type of clock induces a significant apparent dynamic on the received signal, preventing the use of narrow loop bandwidths and/or long integration times. Tests were conducted using two of such platforms connected using a Multiple-Input-Multiple-Output (MIMO) cable for synchronization purposes. In this way, it was possible to simultaneously collect data from two frequencies and implement inter-channel frequency aiding.
The clock of the platform configured as master was used to drive both devices. Views of the experimental setup adopted for the hardware simulator tests are provided in Figure 2. The signal provided by the hardware simulator is split between the two identical low-end SDR front-ends connected through the MIMO cable. Additional experiments were conducted using a second type of SDR front-end of better quality. These tests are described in the authors’ paper mentioned above and presented at the ION GNSS+ conference.
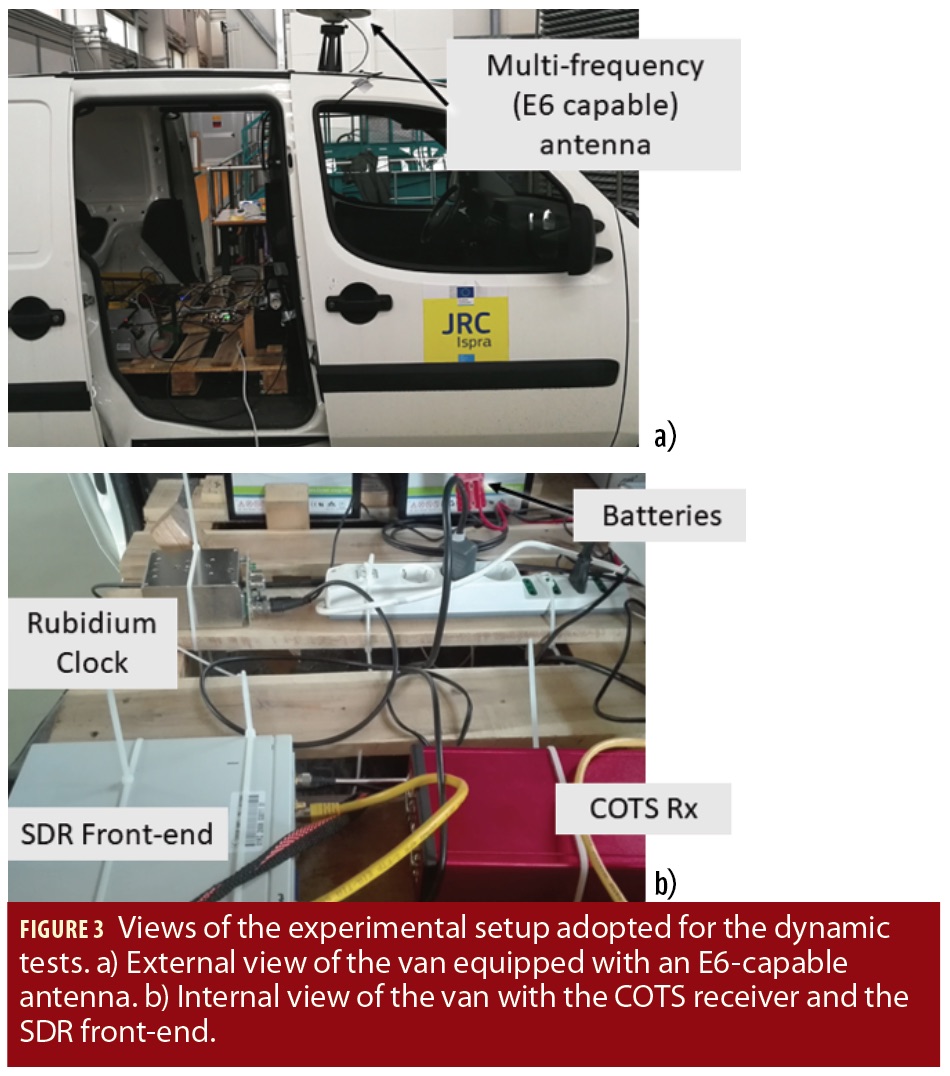
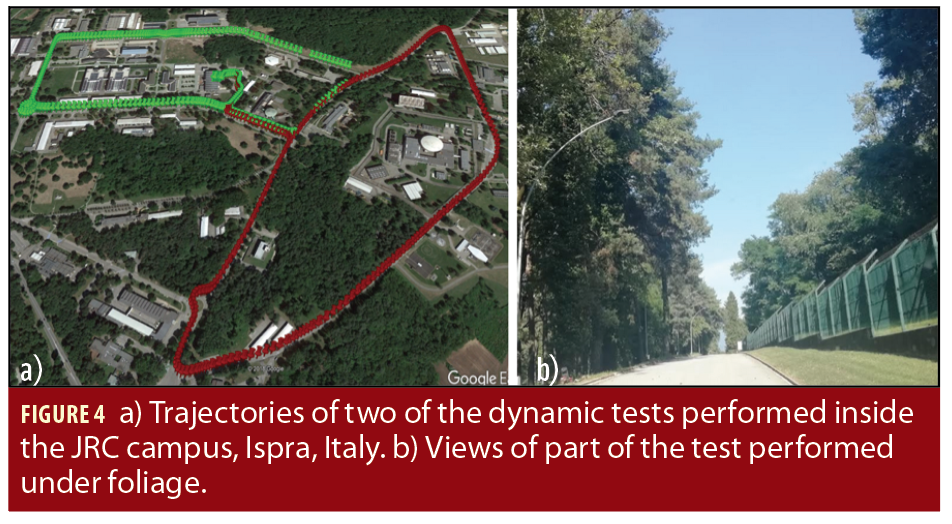
Finally, the third type of tests were conducted using the van shown in Figure 3a that was equipped with a multi-frequency high-end geodetic antenna capable of receiving E6 signals. The antenna, mounted on the van’s roof was connected to one of the low-end SDR front-ends and to the COTS receiver placed inside the van, as shown in Figure 3b. An external 10 megahertz rubidium oscillator has been used to drive the SDR front-end in order to have a stable clock reference. The van was driven around the two paths indicated in Figure 4a and located inside the Joint Research Centre (JRC) campus in Ispra, Italy. As shown in Figure 4b, the paths were characterized by the presence of very tall trees with rich foliage rendering the signal reception challenging. Also small buildings were present on the road sides from time to time. This harsh environment has been selected to assess signal tracking performance under challenging propagation conditions.
Experimental Analysis
During the open-sky test conducted using a roof-top antenna, five Galileo satellites were in view. All five signals were characterized by high C/N0 values ranging from 42 to 55 dB-Hz. Under these conditions, stable tracking was easily achieved even when the data channel was used without inter-frequency aiding. Figure 5 shows the C/N0 time series obtained for the five signals visible during the experiment using both the COTS device and the custom SDR receiver. A difference of less than 1 dB was observed between the C/N0 values estimated by the COTS device and by the custom SDR receiver. This difference was removed to improve the clarity of the plot and highlight the similar trend of the time series estimated by the two receivers. This difference is small and can be justified by hardware differences, leading to different signal losses, and by different approaches for the estimation of the C/N0.
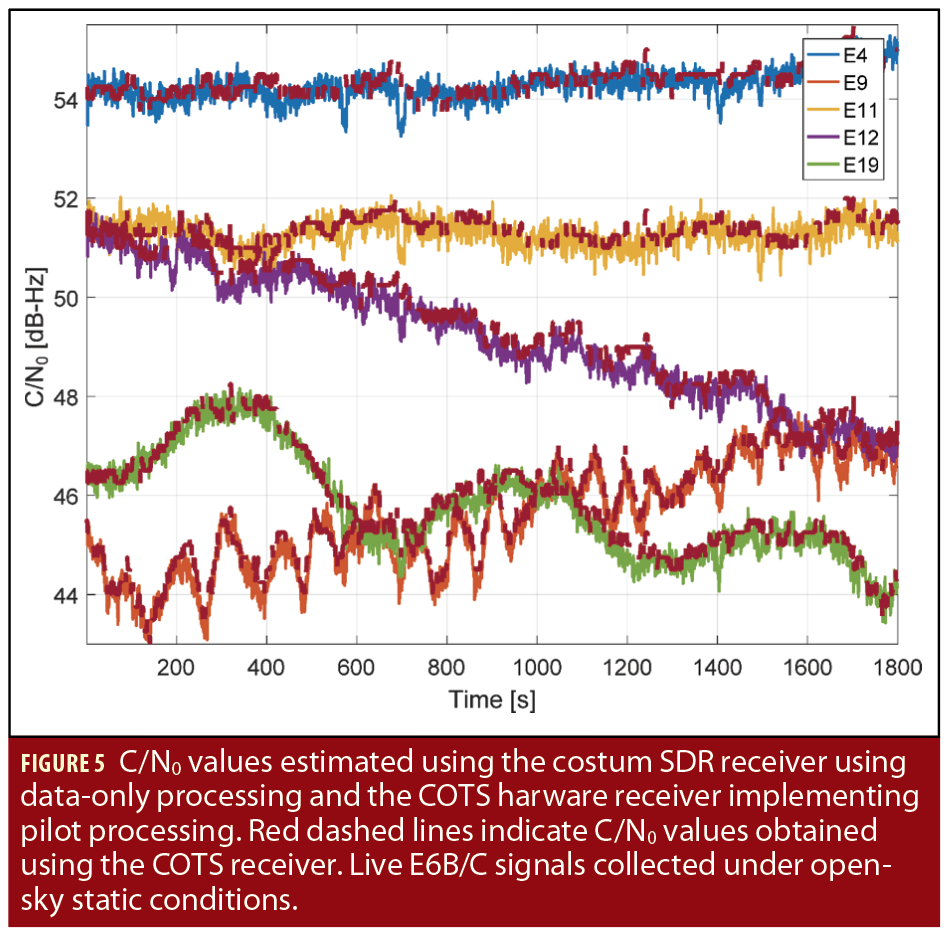
The results shown Figure 5 were obtained using data-only processing with 10 non-coherent integrations. With this configuration, the SDR receiver was able to maintain stable signal lock over the whole duration of the experiments. The C/N0 is used here as a lock indicator and for signal quality monitoring: under open-sky conditions data-only processing achieves performance similar to that obtained using pilot tracking.
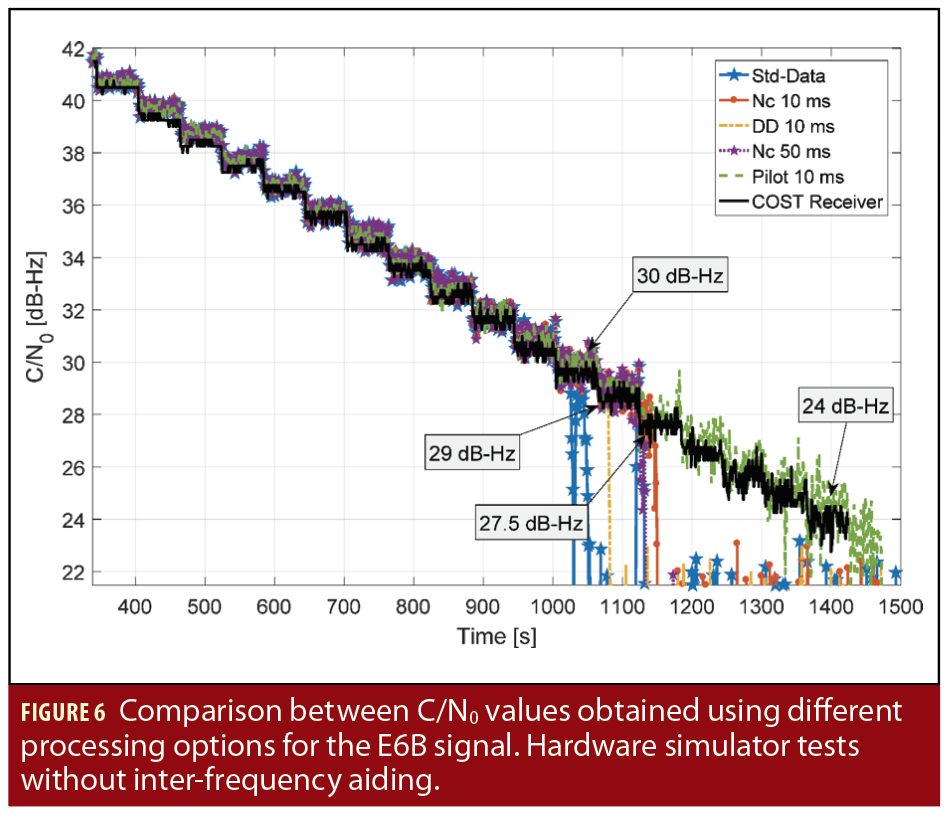
The test with the RF simulator was carried out to assess the sensitivity of the SDR and COTS receivers using different tracking configurations. For this purpose, the C/N0 of all simulated signals was progressively reduced at steps of 1 dB per minute. Figure 6 compares the C/N0 values provided by the COTS device and estimated by the SDR receiver for the different tracking algorithms. Pure pilot processing achieves a tracking threshold of about 24 dB-Hz whereas standard data processing, with a 1-ms coherent integration time, loses signal lock for a C/N0 of about 30 dB-Hz. For pure pilot processing, a coherent integration time of 10 ms was adopted. For all configurations, a third order PLL with a 15 hertz bandwidth was used.
When 10 non-coherent integrations are introduced, the tracking limit of the data processing is around 27.5 dB-Hz and therefore, the sensitivity gap between data and pilot processing is reduced.
The DD PLL does not significantly improve the performance of standard data processing and shows a lower sensitivity with respect to the tracking algorithm adopting 10 non-coherent integrations. Furthermore, no benefit is achieved by extending the non-coherent integrations from 10 to 50 ms. The above result is due to the clock dynamics limiting the maximum number of integrations.
As for the previous test case, the difference between the C/N0 provided by the COTS device and the one estimated by the SDR receiver is within 1 dB-Hz. Moreover, the COTS device, adopting pure pilot tracking, achieves a tracking threshold close to that of pure pilot processing implemented by the SDR receiver.
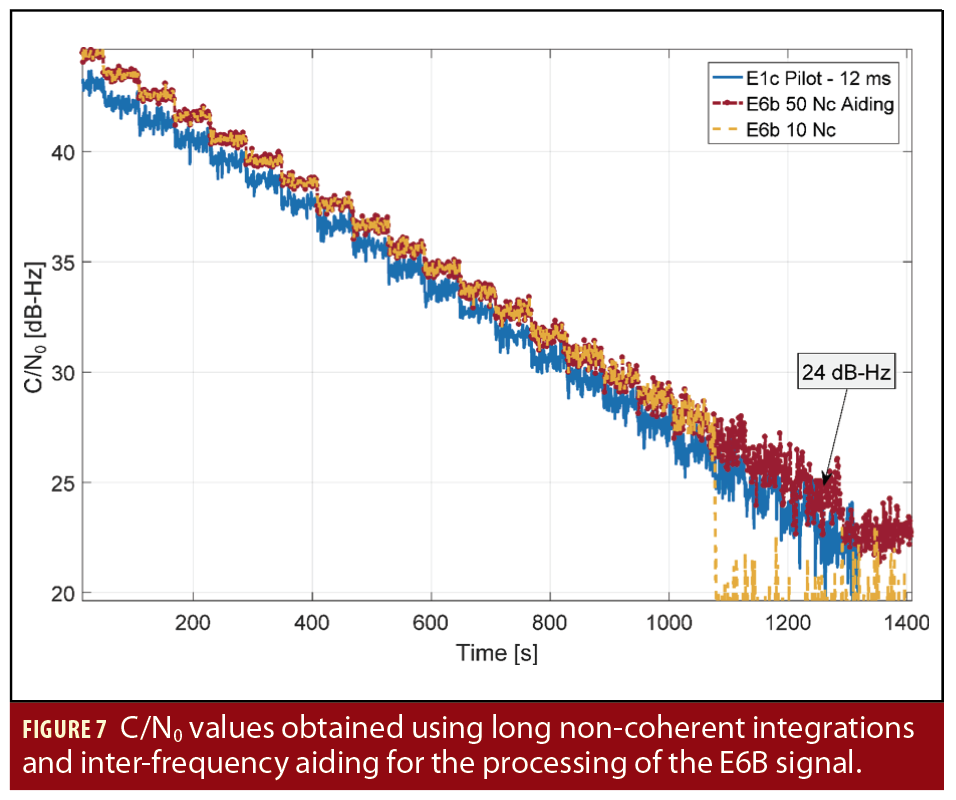
In order to reduce the dynamics introduced by the poor clock embedded in the SDR front-end, inter-frequency aiding was implemented. Figure 7 reports the C/N0 values obtained using data-only processing with inter-frequency aiding and the non-coherent squaring PLL. The C/N0 obtained using pure pilot tracking on the E1C signal is also shown. For the E1C pure pilot tracking, an integration time of 12 ms was used. The E1C primary code lasts 4 ms and 12 ms is the smallest multiple of this duration larger than 10 ms. The latter integration time was used for the previous experiments on E6C.
Inter-frequency aiding allows longer non-coherent integrations and narrow loop bandwidths. In this case, a 5 hertz bandwidth and 50 non-coherent integrations were adopted. This configuration is able to track the E6B signal down to 24 dB-Hz obtaining performance similar to that of pilot processing. Note that, in this case, the E6B signal was lost because loss of lock occurred on the E1C channel used for inter-frequency aiding.
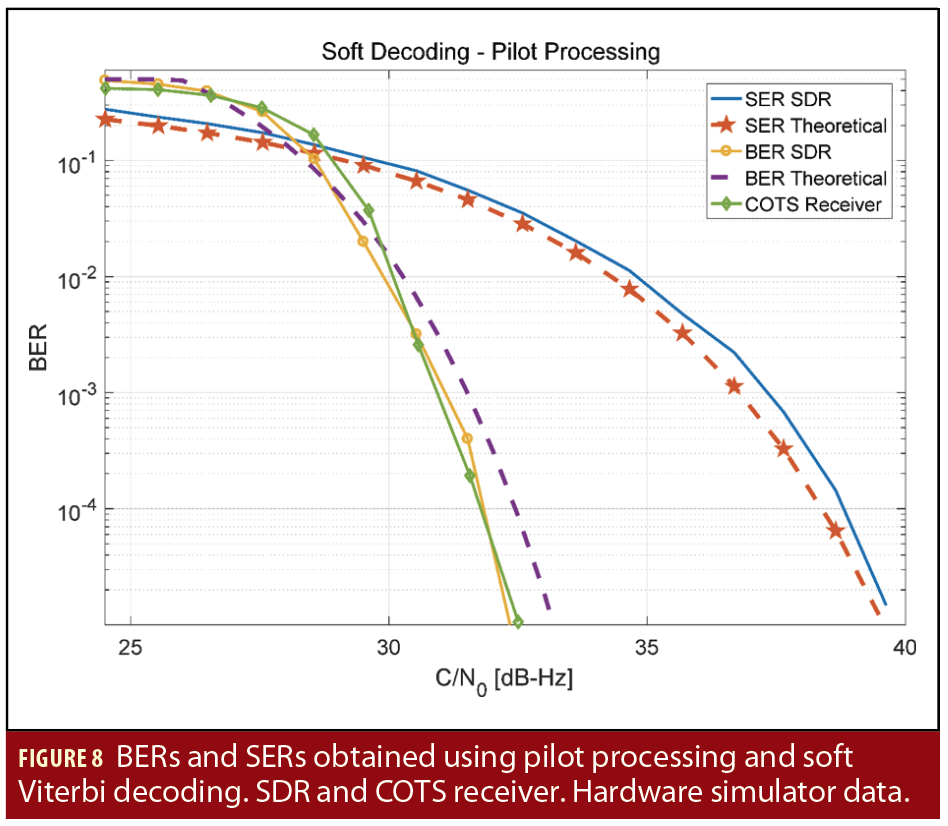
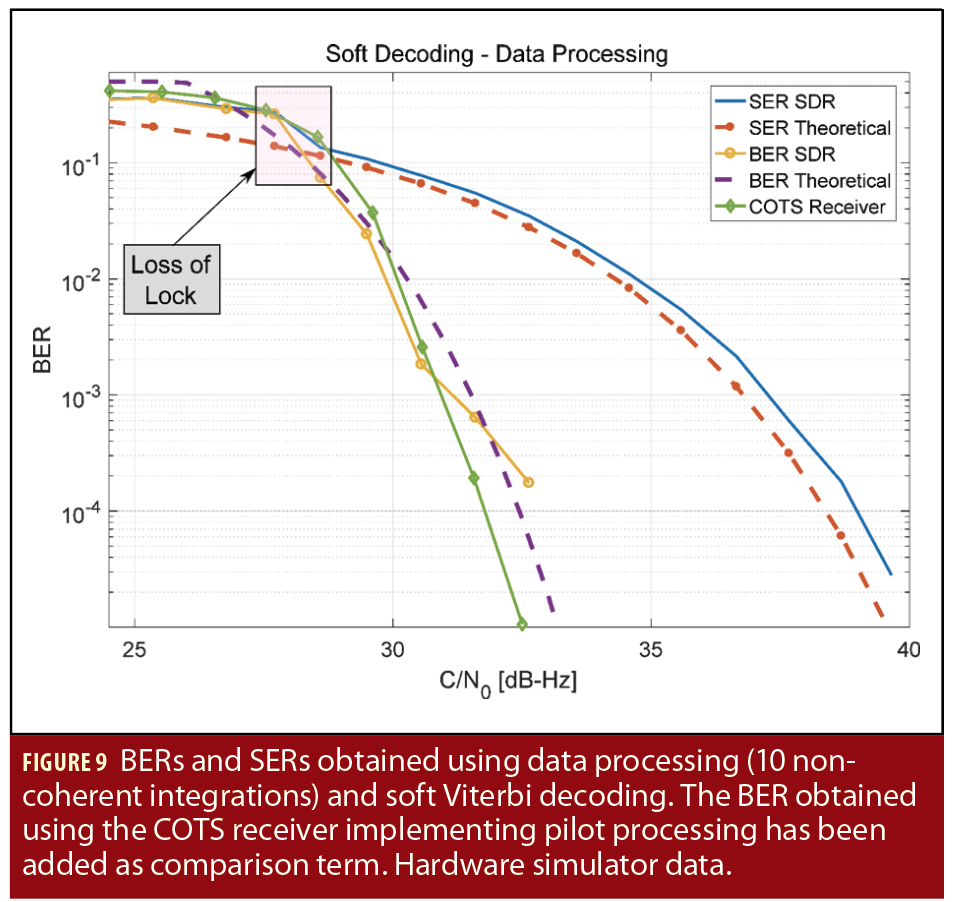
The Galileo E6B signal currently broadcast a dummy message that is known as a priori. The hardware simulator was configured to transmit the same dummy message. For this reason, it was possible to use the received correlator outputs to estimate the Bit Error Rate (BER) and Symbol Error Rate (SER) as a function of the received C/N0. The SER is estimated before decoding the convolutional code used to protect the E6B signal whereas the BER reflects the final E6B data demodulation performance.
The BER and SER curves are shown in Figure 8 for pure pilot processing with a 10-ms coherent integration. When the PLL is tracking the signal phase and frequency, the empirical SER is close to its theoretical value.
Even if pure pilot processing is able to track signals down to 24 dB-Hz, the SER is above 0.1 for C/N0 values lower than 30 dB-Hz, in agreement with the findings of Göhler et al. (2016, Additional Resources). Therefore the ability to track weak signals does not improve demodulation capabilities. This fact is confirmed by the BER shown in Figure 8 for the COTS device that implements pure pilot processing and soft Viterbi decoding. A BER of about 0.1 is obtained for the C/N0 values lower than about 28 dB-Hz. The COTS device and the SDR receiver achieve similar demodulation performance.
Data demodulation performance is analysed in Figure 9 for the data processing case when 10 non-coherent integrations are adopted. As for the previous case, under lock conditions the empirical BER and SER curves closely follow the theoretical one. In correspondence of loss of lock, at about 27.5 dB-Hz, a jump in the BER (SER) values can be clearly observed. After loss of lock, the SER converges to 0.5, which corresponds to a random choice of the symbols, which are correctly guessed half of the time. However, when the loss of lock occurs, the SER achieved using pilot processing is above 0.1, implying that the data demodulation performance is already quite poor in these conditions. Thus, data-only processing does not significantly degrade data demodulation performance of E6B standard receivers even when inter-frequency aiding is not used.
Dynamic Tests
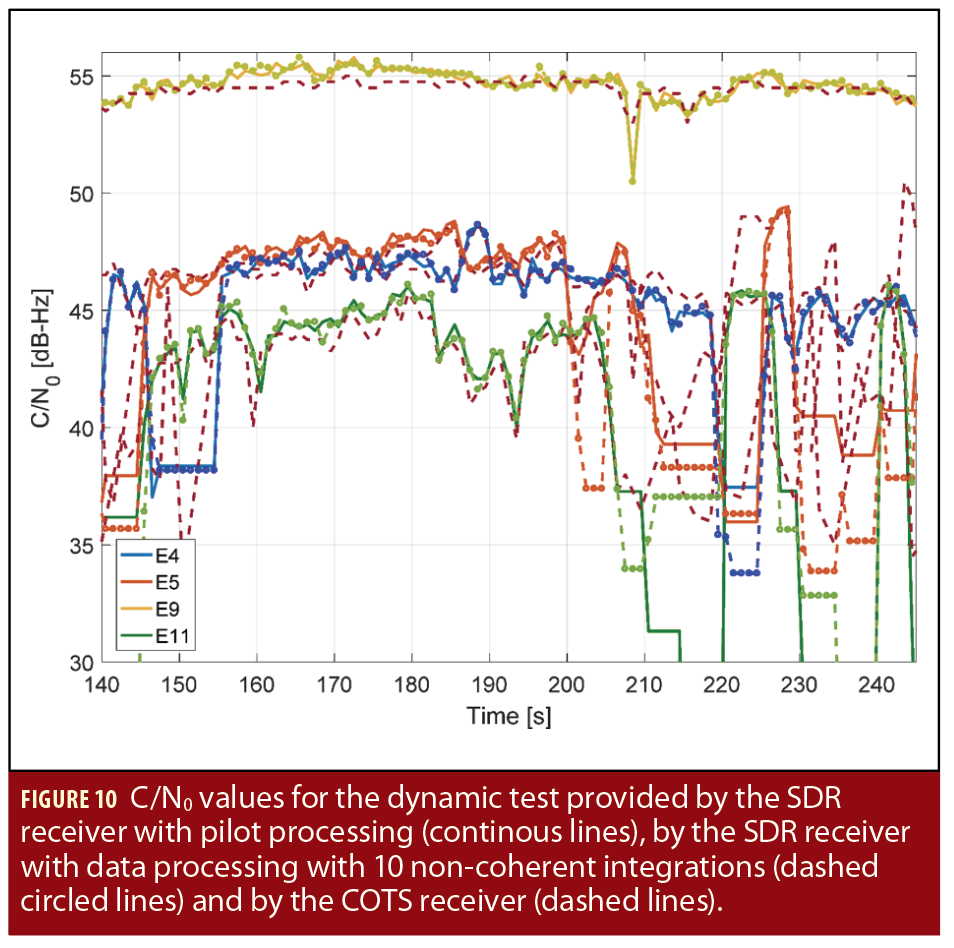
Sample results obtained for the dynamic tests are provided in Figure 10 that considers parts of the trajectory shown in green in Figure 4 a. During this test, four Galileo satellites were in view. All four signals were acquired and tracked by both COTS and SDR receivers. The corresponding C/N0 values are compared in Figure 10 that considers three cases:
• pilot processing implemented using the SDR receiver (continous lines),
• pilot processing implemented by the COTS device (dashed lines) and
• data processing with 10 non-coherent integrations (dashed circled lines).
In general, data and pilot processing provide similar results that are coherent with the C/N0 estimates provided by the COTS receiver. In the dataset, the signal from Satellite Vehicle (SV) 9 is very strong and is characterized by C/N0 values in the order of 55 dB-Hz. This signal was tracked continuously by both SDR and COTS receiver. Moreover, no significant differences were observed between data and pilot processing. For the other three signals, both SDR and COTS receiver experienced frequent loss of locks. Since the loop shown in Figure 4a was performed several times, it was possible to verify that loss of lock always occurred in the same portion of the trajectory, in the proximity of obstacles or when the van was passing under deep foliage. In this case, pilot processing did not provide significant improvement with respect to data-only tracking and loss of lock also occurred using this type of processing strategy. Pilot processing on the SDR receiver adopted 10 coherent integrations and a 15 hertz PLL bandwidth. These were the same parameters used for data-only processing that adopted 10 non-coherent integrations.
Note that the scenario selected was very challenging, and with the completion of the Galileo constellation, more satellites will be available increasing the possibility of having signals characterized by favorable reception conditions as for the signal from SV 9 in our experiment.
These results confirm the fact that the absence of a pilot channel can be compensated, at least partially, by using advanced signal processing techniques such as the usage of non-coherent integrations. In this case, we used a stable clock reference to drive the SDR front-end. Applications that require an even better performance can use E1-E6 inter-frequency aiding which, as demonstrated before, can further reduce the signal dynamics perceived by the E6B PLL.
Conclusions
This article investigated several approaches for tracking the E6B signal without exploiting the E6C pilot component that will be encrypted. The use of non-coherent integrations and of a DD PLL was analyzed along with the adoption of inter-frequency aiding. The different approaches were analyzed using live static data, hardware simulated signals and live experiments under dynamic conditions. The analysis shows that the sensitivity gap between data and pilot processing can be bridged by adopting non-coherent integrations and inter-frequency aiding. Non-coherent integrations are effective in mitigating the impact of noise whereas inter-frequency aiding reduces the dynamic experienced by the E6B tracking loop. This allows one to increase the integration time and reduce the loop bandwidth.
Future work includes additional testing with COTS receivers, the adoption of frequency aiding for dynamics conditions, and the implementation of non-coherent integrations in adaptive tracking loops.
Manufacturers
The hardware simulator used for the tests is a Spirent GSS9000 multi-constellation simulator from Spirent, Crawley, United Kingdom, and the SDR front-ends used for data recording are Universal Software Radio Peripherals (USRPs) 2 by Ettus Research, Austin, Texas, USA. The multi-constellation multi-frequency COST GNSS receiver is the AsteRx4 device from Septentrio, Leuven, Belgium and Torrance, California, USA.
Additional Resources
(1) orio, D., and G. Lachapelle, “A non-coherent architecture for GNSS digital tracking loops,” Annals of Telecommunications, vol. 64, pp. 601–614, Oct. 2009
(2) orio, D., and M. Susi, “Non-coherent processing of E6B signals”, in Proc. of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+), Miami, FL, pp. 1–13, Sept. 2018.
(3) urran, J., and T. Melgard, “The particular importance of Galileo E6C,” Inside GNSS, vol. 11, pp. 57–63, Sep/Oct 2016.
(4) uropean Commission, Implementing Decision (EU) 2018/321 of 2 March 2018, Available on-line at https://eur-lex.europa.eu/eli/dec_impl/2018/321/oj
(5) öhler, E.,I. Krol,M. Bodenbach, J. Winkel,G. Seco-Granados, and I. Fernandez-Hernandez, “A Galileo E6-B/C receiver: signals, prototype, tests and performance,” in Proc. of the 29th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+), Portland, OR, pp. 486–496, Sept. 2016.
(6) utierrez, P. “Fundamental Rethink for Galileo Commercial Service” Inside GNSS, Nov./Dec. 2017, pp. 26-32
(7) eyr, H. and G. Ascheid, “Synchronization in Digital Communication: Phase-, Frequency-Locked Loops, and Amplitude Control,” John Wiley and Sons, Mar. 1990
Authors
Daniele Borio received the M.S. degree in communications engineering from Politecnico di Torino, Italy, and the M.S. degree in electronics engineering from ENSERG/INPG de Grenoble, France, in 2004. He received the doctoral degree in electrical engineering from Politecnico di Torino in April 2008. From January 2008 to September 2010, he was a senior research associate in the PLAN group of the University of Calgary, Canada. He is currently a scientific policy officer at the Joint Research Centre of the European Commission (EC) in the fields of digital and wireless communications, location and navigation.
Melania Susi received her B.E. in Mathematical Engineering from the Universita` TorVergata di Roma, Italy, and M.Sc.s in Communication Engineering and in Geomatic Engineering, respectively, from the Università di L’Aquila, Italy, and from the University of Calgary, Canada. She holds a Ph.D. from the University of Nottingham where she was a Marie Curie fellow. Currently, she is a contract agent at the Joint Research Centre of the European Commission.
Em. Univ.-Prof. Dr.-Ing. habil. Dr. h.c. Guenter W. Hein is Professor Emeritus of Excellence at the University FAF Munich. He was ESA Head of EGNOS & GNSS Evolution Programme Dept. between 2008 and 2014, in charge of development of the 2nd generation of EGNOS and Galileo. Prof. Hein is still organizing the ESA/JRC International Summerschool on GNSS. He is the founder of the annual Munich Satellite Navigation Summit. Prof. Hein has more than 300 scientific and technical papers published, carried out more than 200 research projects and educated more than 70 Ph. D.´s. He received 2002 the prestigious Johannes Kepler Award for “sustained and significant contributions to satellite navigation” of the US Institute of Navigation, the highest worldwide award in navigation given only to one individual each year. G. Hein became 2011 a Fellow of the US ION. The Technical University of Prague honoured his achievements in satellite navigation with a Doctor honoris causa in Jan. 2013. He is a member of the Executive Board of Munich Aerospace since 2016.



