
Guest columnist Sergey Zotov of EMCORE Corporation covers the inconsistencies in inertial grade classification and why it’s time to standardize the terminology.
SERGEY ZOTOV EMCORE CORPORATION
With the burgeoning advancements in inertial navigation, the diversity in inertial sensors and their performance grades has expanded. While a comprehensive framework of standards terminology exists, encompassing both military and civilian guidelines (e.g., the IEEE Standard for Inertial Sensor Terminology), their adoption and application remain inconsistent across the industry. This inconsistency poses two principal challenges:
1. Heterogeneity in data representation: When comparing data sheets from different manufacturers, one can easily observe glaring disparities in representation and format. This heterogeneity impedes efficient comparison, making selection processes for end users cumbersome and potentially misleading.
2. Testing protocol discrepancies: Even with clear guidelines, manufacturers and end users often differ in their understanding and application. This leads end users to independently validate inertial sensors due to inconsistent interpretations of the standards terminology and testing methods.
Moreover, the industry has recently borne witness to a concerning trend: a misunderstanding, misinterpretation, or even outright neglect of fundamental terms for grades such as tactical, high-end tactical, navigation, and strategic.
Given these persistent tendence, it is evident that while existing standards serve a fundamental role, there is a need for a more robust and universally adopted top-level terminology standard that clearly documents what is tactical/navigation/strategic grade for INS/IMU and inertial sensors. This standard should not have double interpretation.
It Should Be Called the Same as it Reckons
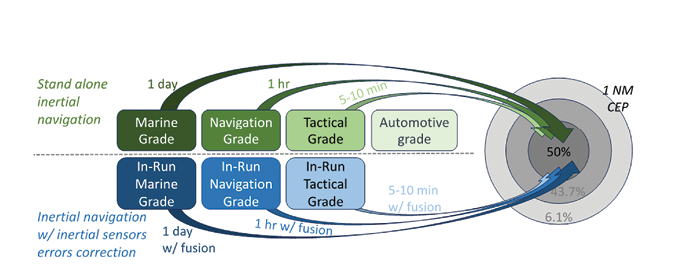
The core function of inertial systems, encompassing inertial measurement units (IMU) and inertial navigation systems (INS), is to provide a standalone solution to the navigation problem. This involves calculating the current position (velocity) and attitude of a moving object based on its previously determined position and the output from the INS. The accuracy with which these systems autonomously solve the navigation problem defines their grade. Any other method to define the class of the inertial sensors may lead to confusion. Accordingly, IMUs and INS, along with related inertial sensors, fall into four distinct grade categories: marine, navigation, tactical and automotive.
Marine-Grade
Purpose and accuracy: Marine-grade INS, representing the highest performance category, are designed to provide extremely accurate standalone navigation solutions. They maintain an error margin of less than 1 nautical mile (approximately 1852 m) over a day.
Applications: Used primarily in ships, submarines and specific spacecraft, these systems are crucial for navigating over long distances where high precision is essential.
Navigation-Grade
Standard compliance and accuracy:
Navigation-grade INS/IMU must conform to the SNU 84 standard, which sets a maximum horizontal position drift of 1 nautical mile (or about 1.5 km in some standards) within the first hour of operation.
Applications: Integral to commercial airliners and military aircraft, these systems ensure safe and efficient navigation, particularly in environments where external navigational aids might be limited.
Tactical-Grade
Short-term accuracy: Tactical-grade IMU/INS are designed for short-term navigation solutions, offering precise guidance with an error margin of 1 nautical mile for a brief period, typically ranging from a few to 10 minutes.
Extended capability through integration: While they have limitations in long-term accuracy, integrating them with other systems like GPS, vision or LiDAR enhances their utility, extending their applicability in various fields.
Sub-categories: It is also worth noting that tactical grade can be further divided into three sub-categories: low-end tactical grade, standard tactical grade, and high-end tactical grade. Low-end tactical grade typically offers accuracy that is an order of magnitude lower than standard tactical grade. Conversely, the high-end tactical grade, sometimes referred to as near-navigation or low-end navigation grade, bridges the gap between standard tactical and navigation grades in terms of accuracy.
Automotive-Grade
Limited standalone capability: As the lowest grade, automotive-grade IMUs are not adequate for precise standalone navigation but are useful when combined with other systems.
Alternative applications: They find use in attitude and heading reference systems (AHRS), pedestrian dead reckoning, and other auxiliary navigation systems, contributing significantly to vehicular technology.
By adhering to this proposed classification system based on navigation accuracy, we can more accurately assess the capabilities and limitations of various IMUs and INS. This approach simplifies the process of selecting the right system for specific navigational needs and ensures the classification is directly tied to the core function of these systems. Thus, when determining the class of an inertial sensor, the direct and primary criterion should be the level of accuracy it provides in an autonomous navigation system. This original classification serves as a primary source, offering a clear and unequivocal framework for understanding and categorizing inertial sensors.
Are Other Grades Needed?
Over the past decade, there has been a notable trend toward using inertial sensors in conjunction with correctors, such as LiDAR and visual odometry, excluding correctors that determine absolute coordinates like GPS. Fusing IMUs with non-inertial sensors enables the calibration of most (but not all) sensor errors. For example, in an ideal case, inertial sensor biases can be calibrated to the level of bias instability and INS attitude and position error can be determined by the level of angle random walk (ARW), velocity random walk (VRW), and bias instability.
Consequently, this approach can elevate an automotive grade IMU’s navigation solution to tactical grade accuracy, or a tactical grade IMU to navigation grade accuracy. The final accuracy achieved by the IMU when fused with non-inertial correctors is predominantly determined by the quality of the correctors and estimation filters (which are not the focus of this discussion), but also by certain parameters of the inertial sensors themselves.
In this context, it makes sense to establish a new terminology. If the parameters of the sensors (such as ARW, bias instability, VRW) enable an inertial system when fused with non-inertial correctors (excluding GPS) to achieve a certain level of performance, we could then refer to the sensor as having “In-Run [Specific Grade]” quality. For example, if an automotive-grade IMU, when combined with non-inertial sensors, achieves a performance of 1 nautical mile accuracy after 10 minutes, that IMU could be termed an “In-Run Tactical Grade IMU.” This classification recognizes the enhanced capability resulting from sensor fusion, thus offering a more nuanced view of the sensor’s performance in practical applications.
Conclusion
This article does not introduce new information, as all the details discussed are well-established and readily available in numerous public domains. The primary objectives of this article are threefold. First, it encourages readers to engage with existing inertial navigation standards, highlighting their significance in the field of inertial sensor technology. Second, the article draws attention to the fact that, occasionally, these standards are not interpreted correctly, leading to inconsistencies in application and understanding. Finally, the article aims to initiate a dialogue regarding the necessity of a new standard for defining sensor grades. By posing this question, the author seeks to provoke thoughtful consideration and discussion within the industry, with the goal of refining and enhancing the standards that guide our understanding and use of inertial sensors.
Author
Sergey Zotov, Ph.D., is a Chief Scientist and EMCORE Fellow with 20 years of experience in developing inertial navigation products. He specializes in advancing the technology of quartz MEMS inertial sensors. Additionally, he has expertise in simultaneous localization and mapping (SLAM), computer vision and sensor fusion.




