
JIYUN LEE, GIHUN NAM AND K. ANDREW SUN, KOREA ADVANCED INSTITUTE OF SCIENCE AND TECHNOLOGY (KAIST)
A: Many forms of differential GNSS (DGNSS) exist to provide GNSS users with corrections to their pseudorange and carrier-phase measurements along with information to support their applications and provide integrity assurance [1].
For example, Ground-based Augmentation Systems (GBAS) comprised of reference receivers at fixed locations at airports broadcast corrections, integrity information, and path definitions to aircraft within 50 km conducting precision approaches and landings when visibility is restricted [2]. Similarly, Satellite-based Augmentation Systems (SBAS) broadcast corrections and integrity information that support users over much larger (e.g., continental) regions [3]. SBAS, GBAS, and other differential systems, including privately-owned ones and those that support real-time-kinematic (RTK) and network-RTK applications, are necessary for applications with demanding accuracy and/or integrity requirements. These applications have expanded greatly in recent years and now include road, rail, ship, and Unmanned Aerial Vehicle (UAV) navigation in addition to the civil aviation applications that motivated the development of SBAS and GBAS.
One feature common to almost all DGNSS implementations is the presence of a one-way datalink from augmentation system to users. This can take the form of local RF transmissions (as in GBAS), L-band transmissions from other satellites (as in SBAS), or via wired or wireless internet connections. These datalinks are needed to provide measurement corrections, integrity information, and application-specific information to users continuously and reliably. There is generally no means for users to transmit their own measurements back to the augmentation sources. Instead, when users notice unusual behavior in their navigation solutions, this information is conveyed separately to system providers (manually or via a different datalink), who may or may not take prompt action to investigate. For example, interference from GPS re-radiators inside an airport hangar whose signals affected nearby aircraft was reported by pilots to an airport operator in Germany. The source was identified after a lengthy investigation, and standards were developed to reduce the likelihood of reoccurrences [4].
LADGNSS Concept for UAV Guidance and Two-Way Communication
An alternative that provides a real-time means for users to report back navigation information was first proposed in [5] to provide high-integrity navigation and guidance to networks of UAVs using a simplified version of GBAS known generically as “Local-Area DGNSS” or “LADGNSS.” Figure 1 (from [5]) shows the original operational concept from [5] in which a single LADGNSS ground station supports multiple UAVs operating within 25 to 50 km of it. Some of these UAVs are “on station” performing missions such as observation or pickup/delivery, while others are in transit to or from missions. Protecting system safety requires keeping the individual UAVs safely separated from each other, from higher altitude bands (where manned aircraft may be flying), and from altitudes near the ground.
Figure 2 (from [6]) shows the functions of the LADGNSS ground and airborne systems and how they differ from GBAS. The ground station has multiple reference receivers and antennas, but unlike GBAS, the antennas are located together (within 10 to 20 meters of each other) to allow siting in a confined area. In addition, they are standard GNSS survey antennas as opposed to the expensive multipath-limiting antennas (MLAs) used in GBAS. Therefore, multipath errors in the pseudorange corrections broadcast by this system will be significantly higher than for GBAS.
The ground and airborne integrity monitoring approach is similar to GBAS but simplified and less redundant, especially because each UAV will have limited (if any) equipment redundancy. On the other hand, LADGNSS already makes use of signals on at least two frequencies (e.g., L1/E1 and L5/E5a) from two or more GNSS constellations (e.g., GPS and Galileo).
The UAV network concept shown in Figure 1 combines differential augmentation of GNSS navigation with guidance and control, meaning the ground station providing corrections and integrity information is also responsible for system-level management and flight guidance for each UAV. As a result, an air-to-ground datalink is needed for each UAV to share its current navigation states (position, velocity, acceleration, and time stamp) with the ground station. Because this datalink is needed anyway, it makes sense to also use it to relay other navigation information from each UAV to the ground station to enhance integrity monitoring. Providing such information from UAVs is an attractive means of mitigating spatially-decorrelating GNSS errors that appear differently depending on separation from the ground station.

Navigation Parameters Transmitted by UAVs
In addition to navigation state information such as position and velocity (typically updated every 1 to 10 seconds depending on current UAV dynamics), each UAV in an LADGNSS network would transmit the following information back to the ground station:
1) IDs (e.g., PRNs) of GNSS satellites being tracked
2) IDs of GNSS satellites used in navigation solution
3) Position (and velocity)-domain protection levels
4) Code-minus-carrier and airborne ionospheric gradient monitoring (IGM) test statistics
5) Flags for any other airborne navigation monitor that exceeds its detection threshold.
Under normal conditions, where no anomalous conditions are detected, these updates would be broadcast by each UAV every 5 to 15 seconds. When unusual conditions occur, such as unexpectedly large protection levels given the set of satellites being tracked or high values of the dual-frequency airborne IGM test statistic (potentially indicating large ionospheric gradients between the ground and the UAV), this rate would automatically increase to allow the ground system to rapidly account for this information in its own outgoing messages to the transmitting UAV and others.
The information provided by UAV broadcasts to the ground station is most useful in detecting anomalous errors or other conditions that currently affect one or two UAVs but may extend to threaten more UAVs in the next few minutes. Among these, anomalous ionospheric fronts separating regions of low and high ionospheric delay are the most worrisome threats to LADGNSS, even when dual-frequency measurements are applied. The following sections summarize the results of a detailed analysis of the ability of networked UAVs and two-way datalinks to mitigate this threat [7]. Other spatially-decorrelated error sources that are at least partially mitigated by this approach include GNSS satellite ephemeris errors and external RF interference or spoofing.

Ground and Airborne Ionospheric Monitoring in LADGNSS
Figure 3 illustrates the benefits of monitoring and reporting by multiple UAVs in a network in terms of detecting ionospheric spatial gradients (and, in general, other spatially-decorrelating errors). In it, two example UAVs are reporting test statistics back to the ground station. UAV2, which is farther from the ground station than UAV1, has a larger differential error, meaning that UAV2 is more likely than UAV1 to detect this anomalous condition and alert the ground station, which will in turn alert UAV1. Thus, UAV1 obtains a benefit from the presence of UAV2, but UAV2 does not obtain any benefit.
The LADGNSS ground station applies Measurement Quality Monitoring (MQM), Code-Minus-Carrier (CMC; also known as Code-Carrier Divergence Monitoring, or CCD), and limits on correction magnitudes to detect unusual ionospheric behavior, especially gradients that cause rapid changes in ionospheric delay as observed by the ground station reference receivers. However, large spatial gradients not visible to the reference receivers or with low temporal dynamics as seen by these receivers are difficult for the ground station to detect.
Ground-based IGM using differential carrier measurements over antenna baselines of hundreds of meters are used for single-frequency Category II/III GBAS [8] but are impractical for LADGNSS. LADGNSS instead uses dual-frequency measurements to perform airborne IGM using the range-domain method developed in [9,10]. Each UAV estimates the difference between ground and airborne ionospheric delays for each corrected satellite (see details in [9]) as its test statistics, with differences exceeding a threshold on one or more satellites leading to their exclusion from use in positioning (and, if more than one satellite is excluded in this manner, only ionosphere-free smoothing can be used for positioning by that UAV).
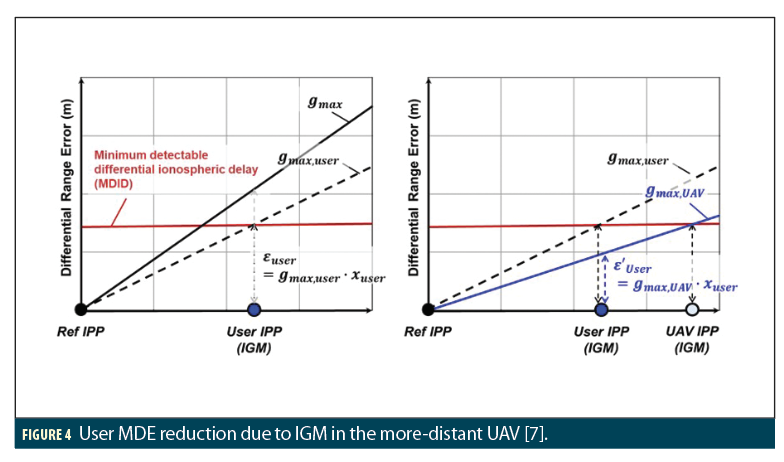
Figure 4 shows how the airborne IGM monitor (denoted simply as “IGM” from this point onward) provides a quantifiable benefit to the closer UAV of Figure 3 (called the “user” UAV) based on the presence of another UAV that is farther away and has improved detection capability. The left-hand plot relates the minimum detectable differential ionospheric delay (MDID) of IGM to the largest gradient (gmax,user) that is detectable within the required missed-detection probability. The presence of IGM is what makes gmax,user lower than gmax shown in this plot, as gmax represents the largest possible gradient from the ionospheric threat model for the region in question (including ground monitoring but without IGM). The right-hand plot shows how IGM at the farther UAV location has the same MDID but results in a lower gmax (i.e., gmax,UAV < gmax,user). Therefore, sharing UAV test statistics with the ground system results in lower maximum undetected gradients for all UAVs that are “inside” the outer UAVs in the same direction at any given time.
LADGNSS Ionospheric Monitoring Improvements for Different Network Configurations
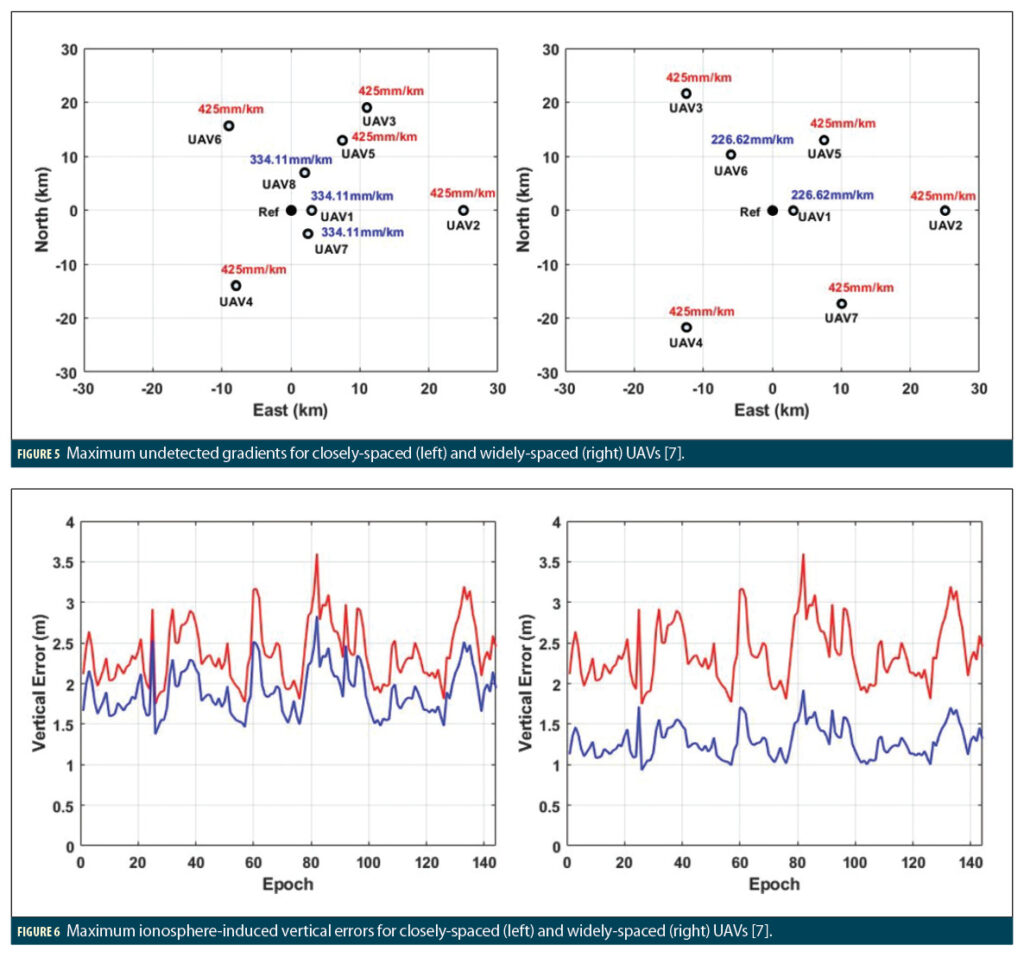
Detailed analyses and simulations in [7] have quantified the benefits provided by airborne ionospheric monitoring (IGM and CMC) using two-way communications for different locations of UAVs near a LADGNSS ground station. Results for two different randomly selected arrangements of UAVs are shown in Figures 5 and 6. The left-hand plot in both figures is for a relatively closely spaced distribution of UAVs, while the right-hand plot is for a similar distribution of UAVs with larger separations among them. The UAVs in Figure 5 with no other UAVs beyond them (farther from the ground station in a similar direction) have the maximum gradients of 425 mm/km shown in red. This represents the maximum undetectable gradient from the mid-latitude GBAS ionospheric threat model [11], as gradients with worst-case relative velocities and approach directions are not guaranteed to be detected by any combination of monitors. The inner UAVs in Figure 5 have lower maximum gradients due to the benefits provided by IGM and CMC monitoring from the outer UAVs. This benefit is larger for the more-widely-spaced UAVs in the right-hand plot, as the additional distance between the inner and outer UAVs in this plot translates into a greater benefit from the monitoring of the outer UAVs.
Figure 6 shows how these benefits translate into lower maximum ionosphere-induced vertical position-domain errors (MIEVs) for a reference station and UAV network located at KAIST in Daejeon, South Korea (36.37° N, 127.36° E) using the expandable 27-satellite GPS constellation from [12], a 27-satellite Galileo constellation, and a 10-degree elevation mask angle. The MIEV reduction for the inner UAVs that gain benefits from outer-UAV monitoring is around 0.5 to 1 meter for the closely-spaced UAVs and 1 to 1.8 meters for the widely-spaced UAVs.
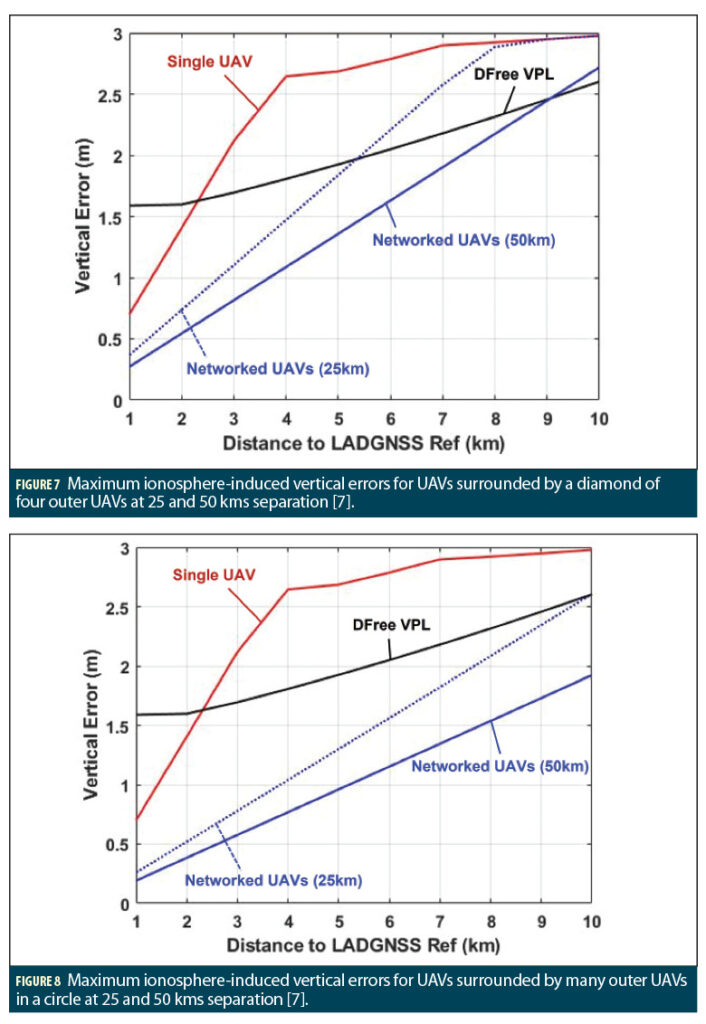
The analyses in [7] also demonstrate how more regular distributions (e.g., diamonds or circles) of outer UAVs surrounding a ground station benefit interior UAVs. Figures 7 and 8 show the MIEV reductions achieved at KAIST and an example GPS/Galileo satellite geometry for a single user UAV surrounded by two different distributions of outer UAVs as a function of reference-to-user-UAV separation. In Figure 7, four outer UAVs are present in a diamond-shaped pattern at the Eastern, Northern, Western, and Southern edges of coverage. In Figure 8, an indeterminate number of outer UAVs are present in a circular pattern at the edge of coverage with enough UAV density to cover all possible ionospheric front approach directions (meaning that roughly 10 to 12 outer UAVs are needed).
In Figures 7 and 8, the red line shows the MIEV of a single UAV at a given (x-axis) distance from the ground station, referring to a UAV that obtains no benefit from multiple-UAV monitoring and only benefits from its own monitoring and that of the ground station (as in GBAS with a one-way datalink). The two blue lines labeled “Networked UAVs” show the lower MIEVs obtained by the user UAV based on the contributions of the outer UAVs at a 25-km (dotted line) and 50-km (solid line) separation from the ground system. The black line shows the Vertical Protection Level (VPL) computered by the user UAV based upon divergence-free (DFree) smoothing, which was verified in [9] to be the optimal smoothing technique for LADGNSS. This VPL determines the amount of separation needed between the user UAV and other vehicles or obstacles as long as it is not exceeded by MIEV. Thus, the primary system-level benefit of multiple-UAV monitoring and information sharing is to bring MIEV under worst-case ionospheric anomalies below the DFree VPL so operations are not further constrained by this threat.
The MIEV reductions in Figures 7 and 8 exceed those for the random UAV arrangements in Figures 5 and 6 because the diamond and circular arrangements of outer UAVs cover most or all ionospheric front approach directions and are farther away from the ground station than in the random case. Because UAV network distributions in practice will not be this ideal, Figures 7 and 8 are intended to show the maximum benefits of multiple-UAV monitoring and two-way information sharing in the presence of ionospheric anomalies bounded by the mid-latitude GBAS threat model.
Summary and Ongoing Work
This article shows how the use of two-way datalinks in LADGNSS allows multiple UAVs to share information with a ground station broadcasting corrections and integrity information to mitigate the threat of ionospheric spatial decorrelation to a much greater extent than when each UAV is left to mitigate the threat on its own. Well-spaced configurations of outer UAVs reduce the threat of ionospheric anomalies to UAVs relatively close to the ground enough that these threats do not limit operations or availability. This is not the case for the outer UAVs themselves, but UAVs near the edges of coverage will have larger protection levels under nominal conditions and, for this reason, will need to maintain greater separations from other UAVs and obstacles in any case. Improving protection levels for UAVs closer to the ground station is expected to significantly enhance the operations of local-area UAV networks.
Now that the potential of the multiple-UAV information-sharing concept has been demonstrated, we are assessing its benefits for other spatially-decorrelating threats to GNSS and optimal strategies for translating UAV test-statistic transmissions back to the ground system into updated ground-system integrity messages. For example, detection of anomalous ionospheric gradients by multiple UAVs in a single sector of the sky may not require the ground station to discontinue use of LADGNSS at all UAVs. In addition, continual UAV monitoring of ionospheric gradients along all approach directions may justify reducing the prior probability of the largest gradient in the threat model, which would benefit all UAVs in the network, including the outermost ones.
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIT) (No. NRF-2019M1A3B2A04102714).
References
(1) B. Parkinson and P. Enge, “Differential GPS,” in B. Parkinson, P. Enge, P. Axelrad, J. Spilker Jr., Eds., Global Positioning Systems: Theory and Applications. Cambridge, MA, AIAA Press, 1996, Vol. II, Ch. 1, pp. 3-50. https://arc.aiaa.org/doi/book/10.2514/4.866395.
(2) B. Pervan, “Ground-Based Augmentation System,” in Y. J. Morton, F. van Diggelen, et al., Eds., Position, Navigation, and Timing Technologies in the 21st Century. Hoboken, NJ, Wiley/IEEE Press, 2021, Vol. I, Ch. 12, pp. 259-276. https://sites.google.com/view/pnt21-public.
(3) T. Walter, “Satellite-Based Augmentation Systems (SBASs),” in Y. J. Morton, F. van Diggelen, et al., Eds., Position, Navigation, and Timing Technologies in the 21st Century. Hoboken, NJ, Wiley/IEEE Press, 2021, Vol. I, Ch. 13, pp. 277-306. https://sites.google.com/view/pnt21-public.
(4) E. Steindl, W. Dunkel, et al., “The impact of interference caused by GPS Repeaters on GNSS receivers and services,“ Proc. 2013 European Navigation Conference (ENC GNSS 2013), Vienna, Austria, April 2013. http://www.enc2013.org/.
(5) S. Pullen, P. Enge, J. Lee, “Local-Area Differential GNSS Architectures Optimized to Support Unmanned Aerial Vehicles (UAVs),” Proc. ION ITM 2013, San Diego, CA, Jan. 2013. http://web.stanford.edu/group/scpnt/gpslab/pubs/papers/Pullen_IONITM_ 2013_LADGNSSforUAVNetworksITM2013final.pdf
(6) S. Pullen, “Safe Separation of UAVs based on Local-Area DGNSS Networks,” Proceedings of 2017 Advanced Navigation System Workshop, Korean Society for Navigation, Seoul, Republic of Korea, July 2017 (presentation only).
(7) G. Nam, K. Andrew Sun, et al., “Networked UAV Detection and Alerting of Ionospheric Anomalies within LADGNSS Navigation Framework,” Proc. ION GNSS+ 2022, Denver, CO, Sept. 2022. https://doi.org/10.33012/2022.18424.
(8) S. Khanafseh, S. Pullen, J. Warburton, “Carrier Phase Ionospheric Gradient Ground Monitor for GBAS with Experimental Validation,” Navigation, Vol. 59, No. 1, Spring 2012, pp. 51-60. https://doi.org/10.1002/navi.3.
(9) M. Felux, Total System Performance of GBAS-based Automatic Landings. Ph.D. dissertation, Technical University of Munich, 2018. https://elib.dlr.de/121908/1/Felux-Michael.pdf.
(10) G. Nam, D. Min, et al., “Optimal Smoothing and Monitor Strategies for Dual-Frequency Dual-Constellation (DFDC) LADGNSS under Anomalous Ionospheric Conditions,” Proc. ION ITM 2022. Long Beach, CA, Jan. 2022. https://doi.org/10.33012/2022.18166.
(11) S. Datta-Barua, J. Lee, et al. “Ionospheric Threat Parameterization for Local Area Global-Positioning-System-based Aircraft Landing Systems,” AIAA Journal of Aircraft, Vol. 47, No. 4, 2010. https://doi.org/10.2514/1.46719.
(12) GPS Standard Positioning Service (SPS) Performance Standard (GPS SPS PS), Washington DC, U.S. Dept. of Defense, 5th Edition, April 2020. https://www.gps.gov/technical/ps/2020-SPS-performance-standard.pdf.
Authors
Dr. Jiyun Lee is an associate professor in the department of Aerospace Engineering at KAIST. Prior to joining KAIST, she worked for Tetra Tech AMT as a principal systems engineer and for SiRF Technology as a senior GPS systems engineer. Her specialties include integrity architectures, GNSS augmentation systems, and atmospheric and space weather monitoring. She holds an MS from the University of Colorado at Boulder and a PhD from Stanford University in Aeronautics and Astronautics.
Gihun Nam received his B.S. and M.S. degrees in Aerospace Engineering from the Korea Advanced Institute of Science and Technology (KAIST) in Daejeon, Korea, in 2019 and 2021, respectively. He is currently a Ph.D. candidate at KAIST working on augmentation systems and multi-sensor integration.
Kiyoung (Andrew) Sun received B.S. and M.S. degrees in Aerospace Engineering from the Korea Advanced Institute of Science and Technology (KAIST), South Korea, in 2018 and 2020, respectively, He is currently pursuing his Ph.D. degree at KAIST, and his research interests include ionospheric monitoring and mitigation techniques for GNSS-based augmentation systems.


