As small autonomous aircraft move into more demanding operating environments, the PNT challenge is shifting from nominal accuracy to system coherence. Hyfix argues that tighter integration across positioning, timing, estimation, and control can reduce hidden error, improve integrity, and make autonomy stacks more resilient under degraded conditions.
In many small-UAS architectures, positioning, heading, inertial sensing, corrections, estimation, and control are still distributed across separate modules with different assumptions, update rates, and confidence models. That approach can work in nominal conditions, but it also creates more places for latency, inconsistency, and error propagation to enter the stack.
Hyfix is positioning the H1 as an architectural response to that problem. The company’s core argument is that too much uncertainty is still being passed across subsystem boundaries, making autonomous behavior harder to model and trust. Its answer is what can be described as stack compression: bringing positioning, timing, estimation, compute, and communications into a single co-designed architecture so the system error model can be treated more coherently. The claim is not simply that more functions reside on one device, but that tighter integration can constrain error earlier, improve confidence modeling, and reduce the disconnect between navigation and control.
WHY STACK COMPRESSION MATTERS
In a conventional architecture, each subsystem is optimized largely for itself. The GNSS receiver solves for position and time. The flight controller solves for attitude and control. The IMU supplies motion data to the flight stack. A companion computer handles heavier autonomy logic. Corrections arrive as an external service. Radios handle their own timing and links. Integration is required at every layer, and much of that integration is repeated from one platform program to the next.
The result is not just complexity. It is an error-modeling challenge. If a system begins to behave badly, the root cause can sit anywhere: a timing mismatch between modules, an IMU limitation inside the autopilot stack, a corrupted GNSS solution presented with misleading confidence, or a mismatch between what one module thinks “good data” means and what another assumes it means. From an engineering standpoint, each interface creates another place where error can be delayed, transformed, or misinterpreted. That is why Hyfix emphasizes that the challenge in autonomy is not simply getting a better measurement. It is understanding where error comes from, keeping it inside known bounds, and preventing it from cascading into bad decisions or unstable control.
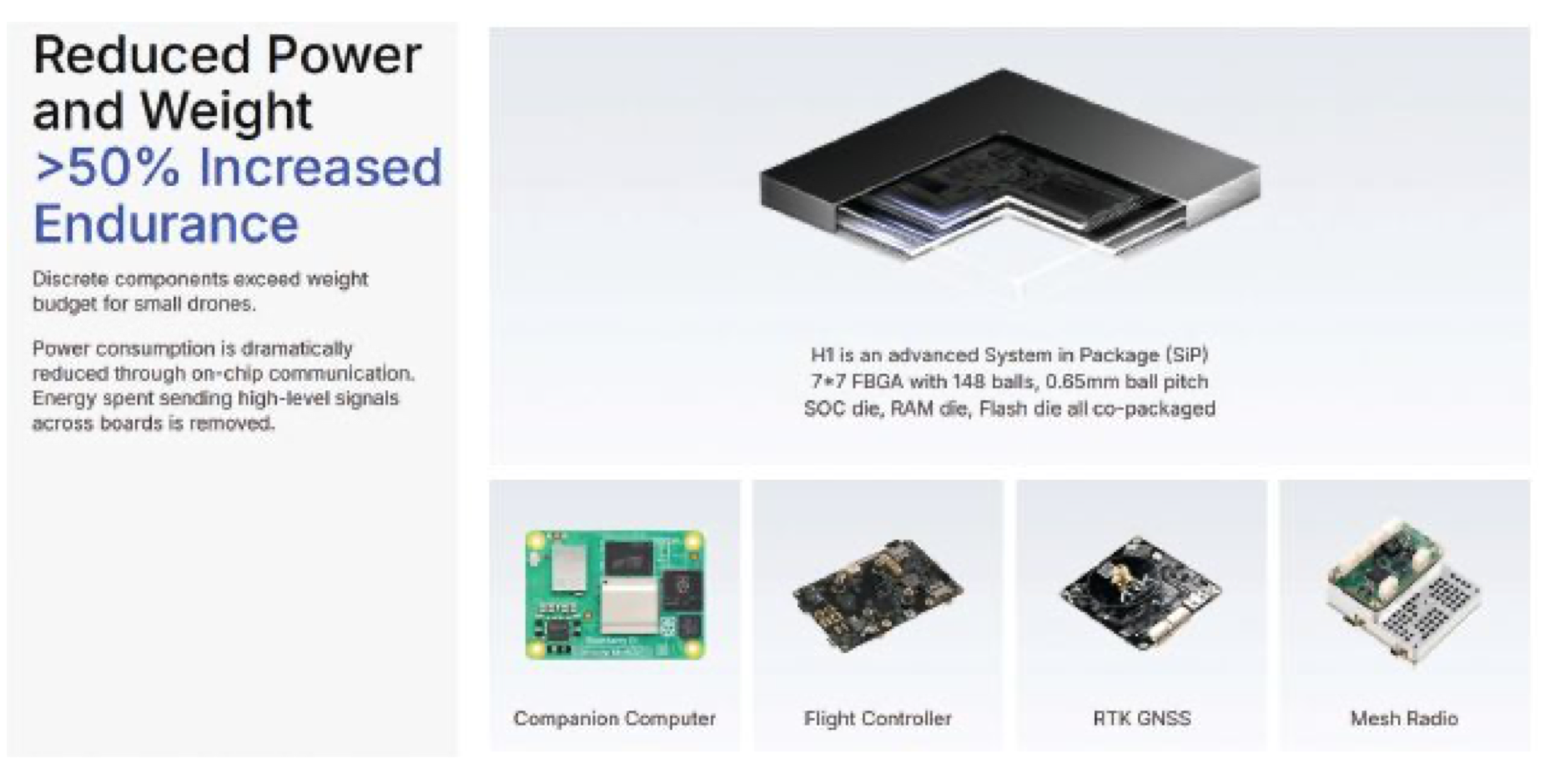
This is the real significance of stack compression. The H1 is intended to bring those functions inside one architecture so timing, corrections, estimation, and control operate on a shared state rather than across loosely coupled interfaces. In that model, data stays on-chip instead of moving across boards, reducing delay and limiting opportunities for timing drift or interpretation error.

TIGHT COUPLING AND THE ESTIMATOR PROBLEM
Hyfix says every H1 runs the NuttX operating system and is loaded with the PX4 stack natively. That is significant because it changes where the integration occurs. Traditional flight controllers such as PX4 and ArduPilot are strong on attitude estimation, but their GPS-denied inertial navigation performance is often limited by the IMUs typically integrated on standard boards. More advanced fusion frequently gets pushed to the integrator, who must add a companion computer such as a Raspberry Pi or Nvidia Jetson. GNSS modules may also include embedded fusion, but those algorithms are often built around 2-D or low-dynamic ground-vehicle assumptions and may not translate well to flying vehicles.
The architectural problem is that flight controllers and GNSS receivers are usually separate physical items. Position data arrives over a serial bus at perhaps 1 to 10 Hz as a simple PVT input, while the IMU is directly connected to the flight controller rather than to the GNSS engine. That separation makes it difficult to build tightly coupled filters that can work directly with raw satellite measurements such as code, Doppler, and carrier phase. By integrating GNSS and flight control in one system, Hyfix asserts that the H1 opens the door to tighter coupling at the estimator layer.
Tight coupling is not simply a buzzword here. It changes what the estimator can see and when it can see it. Instead of consuming a downstream position fix as a finished product, the filter can work closer to the raw measurement layer and keep timing, inertial data, and satellite observations inside one architecture. That is a fundamentally different proposition from a serially connected PVT-based design. It is also better aligned with flying vehicles, where attitude, heading, velocity, and control interact on faster, more dynamic timescales than they typically do in ground systems.
TIME SYNCHRONIZATION AS A HIDDEN SYSTEMS BURDEN
GNSS often provides the master clock in autonomous systems through PPS. But once sensors and subsystems are spread across multiple boards, maintaining good time synchronization becomes a material integration chore. Timing drift or inconsistent timestamping across modules can quietly degrade estimator performance even when each subsystem appears healthy in isolation. Hyfix’s position is that bringing more of the navigation, fusion and control chain inside one architecture reduces that burden and makes time coherence easier to preserve.
DUAL-ANTENNA HEADING MOVES DOWNMARKET
One of the clearest technical examples is heading.
Traditionally, small drones have relied on geomagnetic sensors to estimate heading. That solution is cheap and compact, but it comes with familiar drawbacks. Magnetometers require hard-iron and soft-iron calibration to account for disturbances from batteries, motors, payloads, and surrounding structures. In highly supervised operations, calibration can be managed. In autonomous operations—especially swarms or drone-in-a-box deployments—it becomes much harder to do consistently. The vehicle may also operate near dynamic magnetic disturbances such as cars, bridges, or industrial infrastructure, where no amount of prior calibration completely solves the problem.
Dual-antenna heading offers a more geometric alternative, but it has historically been reserved for larger and more expensive aircraft because it often required two receiver chains and a longer baseline between antennas. Hyfix’s claim is that H1 changes that trade. The chip includes dual RF input ports and can compute heading directly. Mike Horton, founder and CEO, said H1’s resolution and noise performance are sufficient to achieve heading accuracy on par with a geomagnetic sensor using only a 0.2-meter baseline between antennas—small enough to fit on a sub-250 g mini-drone.
That detail matters because it brings dual-antenna heading into a class of aircraft where it has not been easy to justify. If the baseline requirement drops enough to fit small airframes, then dual-antenna heading is no longer a large-UAV luxury. It becomes an architectural option for the very aircraft that struggle most with reliable magnetic calibration. Horton’s practical summary is blunt: dual antenna can replace the compass, and even with a short baseline it should be “far better and far more repeatable than a compass.”
From a control standpoint, that has implications beyond heading accuracy alone. But the more important implication may be integrity.
GEOMETRY AS AN INTEGRITY CONSTRAINT
The H1’s dual-antenna architecture is also presented as a built-in check on whether the GNSS solution is believable.
Multipath remains one of the hardest real-world problems in GNSS-enabled autonomy. Signals reflecting from buildings, terrain, vehicles, or industrial structures can produce position solutions that appear plausible while being materially wrong. In loosely coupled architectures, those solutions may be passed downstream with a reassuring figure of merit, such as DOP, even when the data should not be trusted. The fusion engine then weights the wrong input too heavily.
A dual-antenna system introduces another measurement constraint. The physical distance between the antennas is fixed and known. In the positioning engine, that baseline can be computed via moving-base RTK. If the signals entering one or both antennas are distorted by multipath or interference, the measured baseline will deviate from the known geometry.
That inconsistency becomes an integrity signal. It does not eliminate the error source, but it gives the system another reason to suspect that the GNSS-derived solution is slipping.
Instead of only accepting a single-antenna PVT solution at face value, the system can compare geometry against measurement behavior and ask whether the result is self-consistent. In practice, that is what makes predictable degradation a measurable system behavior.
CORRECTIONS AS PRECISION AND TRUST INFRASTRUCTURE
The H1 treats corrections as more than an accuracy service.
The H1, Horton said, can receive network data for two purposes. The first is familiar: traditional RTK corrections for higher accuracy and ephemeris support for faster convergence. The second is more interesting: network navigation messages can also be used as a check against spoofed navigation data. In other words, corrections are not only there to improve precision. They can also act as a trust layer.
A receiver that can compare received navigation content against trusted network-delivered ephemeris is in a stronger position to detect inconsistency before it turns into corrupted state estimation. That reframes corrections architecture as part of the system’s integrity design, not just its accuracy budget.
THE TACTICAL EDGE AND GRACEFUL DEGRADATION
Hyfix places much of this discussion at what it calls the tactical edge: environments with limited power, constrained bandwidth, denser RF conditions, degraded GNSS, and less room for recovery from mistakes. In those settings, the system’s real value lies not only in accuracy but in how well it detects and responds to uncertainty. The ability to constrain error at the source should allow the vehicle to degrade more predictably, relying more intelligently on inertial, visual, or other supporting inputs as conditions change.
Horton describes the handoff in practical terms. The fixed baseline between the two antennas becomes “another very powerful constraint” that helps the system “switch over your sensor fusion, to use IMU, to use camera, to use whatever.” That is a significant observation because it makes clear that the dual-antenna design is not only about heading or RTK. It is part of the trigger logic that helps the fusion engine decide when to trust GNSS less and trust other sources more.
LEO PNT AND THE NEXT TIMING LAYER
Hyfix points to LEO PNT integration, including Xona, as part of the resilience path. Horton goes further: GEODNET is already tracking Xona signals on base stations around the world, and those signals are said to be 40 to 100 times stronger than traditional GNSS, improving jamming resistance and indoor penetration. The first commercial service from Xona is expected to be a precision timing signal in 2027.
The most interesting part is not simply signal strength. It is what trusted timing might enable. Horton suggests that a high-power precision timing signal could allow a drone and controller to share nanosecond-accurate time even in the presence of GNSS jamming. That shared time could then be used to do ranging over the data link, adding another range source to help correct visual-odometry errors in GPS-denied environments. When Xona reaches full constellation, the system would also gain a stronger additional resistance to jamming.
If that model matures, the first major LEO contribution to small-aircraft autonomy may not be position in the classic sense. It may be trusted time, and from trusted time, better synchronization and ranging across the broader autonomy stack.
A DIFFERENT PNT ARCHITECTURE FOR SMALL AUTONOMOUS AIRCRAFT
What H1 ultimately proposes is a reframing of the PNT problem for small autonomous aircraft. The question the industry has been asking—how to add more capable components to the stack—may be less important than the question Hyfix is now pressing: how to build a navigation and control architecture where fewer boundaries between systems means fewer opportunities for hidden error to become visible failure. Tight coupling, dual-antenna integrity, coherent timing, trusted corrections, and LEO-derived resilience are not independent features. They are expressions of the same architectural logic—that autonomy becomes more trustworthy when confidence is modeled as a system property, not assembled from loosely connected parts. That is not a modest claim. But the technical case behind it is serious, and for a PNT community already moving toward assured, layered and application-integrated architectures, it is exactly the right direction to be pushing.




