There’s a clear need for GNSS corrections, but the alphabet soup of service flavors, delivery methods and business agreements make choosing the right service seem overwhelming. We break it all down and take a look at how you can use GEODNET’s web3 Network of GNSS reference stations to manage your own GNSS corrections service.
Mike Horton GEODNET Project Creator
With the rapid advance of autonomy and AI, precise spatial context is now crucial for many applications from urban navigation to agricultural automation. The need for GNSS corrections is growing, but the alphabet soup of service flavors, delivery methods and business agreements involved can be intimidating when it comes to selecting a service.
Here, we aim to clear up the confusion, defining some of the terminology and differences between the services as well as introducing the ways they rely on ground based GNSS infrastructure known as Continuously Operating Reference Stations (CORS). We highlight recent developments toward a large-scale decentralized GNSS infrastructure solution, GEODNET, which allows customers to directly build, integrate and manage their own GNSS correction service.
CORS stations: Why Are They Needed?
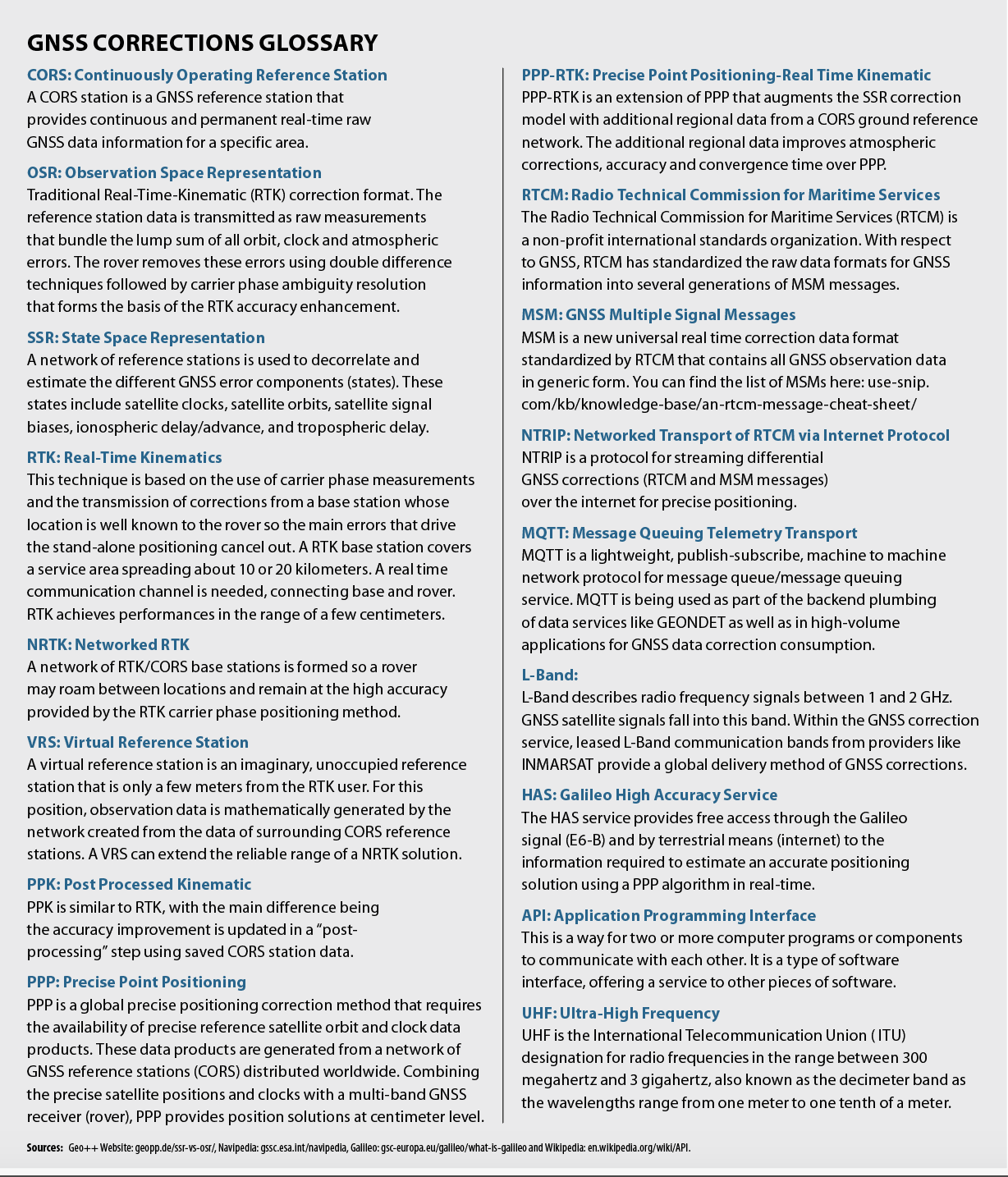
A CORS station is a well installed and permanently online GNSS receiver. The purpose of the CORS station is to continuously collect as many GNSS satellite signals with as much fidelity as possible. To achieve high-fidelity GNSS signal measurement, it is crucial that CORS stations are well-installed to minimize antennae motion and the reception of multi-path reflections. The GNSS antennae itself should have a stable phase center and be well calibrated by the National Geodetic Service or a third-party vendor such as GEO++. To collect as many satellites and signals as possible, the CORS station should be a full-constellation triple or quad frequency GNSS receiver.
The need for a high-quality GNSS receiver, excellent installation practices, and an extremely stable network connection has made it expensive to install CORS stations; however, high-quality GNSS signal measurements are necessary to achieve high-accuracy rover location. A rover is a GNSS-enabled device connected to a GNSS correction service that seeks to obtain the highest-accuracy location estimate possible. In every precise positioning algorithm, the underlying CORS stations are key to positioning algorithm performance. This station data allows the various correction network algorithms and approaches to reduce the major errors in the connected rover’s position estimate. These error sources are satellite orbit errors, clock errors and ionospheric/tropospheric signal delays.
Different positioning engine algorithm approaches use CORS station data in different ways and require different CORS network topologies. However, in the end, all the precise positioning engine algorithms mitigate the same error sources using data from one or more CORS stations.

The Corrections Services
Precise Point Positioning
Precise Point Positioning (PPP) relies on the transmission of a global correction model referred to as Space State Representation (SSR). SSR models all major standard GNSS error sources, including the satellite orbit error, satellite clock error, and a coarse model of satellite signal delays caused by the atmosphere (ionosphere and troposphere) when the GNSS signals penetrate these layers while traveling to Earth. In an SSR solution, the global model is computed at one or more central data centers based on a set of global distributed GNSS base stations. GEODNET maintains a growing network of approximately 70 core stations for these purposes. These global backbone stations are listed as G001 to G071 on the station console map. GEODNET provides this global station data to customers who process and deliver proprietary PPP solution feeds.
The compact SSR correction model for PPP allows efficient simplex data delivery; however, the very large spacing between the global backbone stations greatly limits modeling of the ionospheric and tropospheric signal delays. This results in a lower accuracy final solution with much longer convergence time (typically 20 minutes) when compared to other techniques such as PPP-RTK and RTK. Another challenge with PPP is it requires a specialized positioning engine on the GNSS receiver. This positioning engine is typically tuned to a manufacturer specific encrypted satellite (L-band) delivery channel. This solution works well in vertically integrated products, but it is difficult for customers who seek to integrate several different brands of GNSS receivers into a solution or ecosystem.
The European Space Agencies’ Galileo constellation has begun free public transmission of PPP correction data on the E6-b channel as well as over the internet. This service is known as Galileo High Accuracy Service (HAS).
RTK and Networked RTK
Real-Time Kinematics (RTK) is a very mature high-accuracy positioning technique that also remains the most accurate with near instant convergence time. If the connected rover is within 20 km to 40 km of the GNSS reference station, the rover can achieve 1 to 2 centimeter accuracy both horizontally and vertically within a few seconds.
The RTK algorithm predates consumer internet adoption. RTK was originally implemented using a single GNSS reference station connected to a single GNSS rover via a radio link operating in the licensed or unlicensed Ultra High-Frequency radio spectrum (UHF).
Instead of setting up a GNSS reference station each time an RTK rover is used, Network RTK (NRTK) conveniently delivers reference station data to a rover over the internet via a standard protocol called Network Transport of RTCM over IP (NTRIP). RTCM is a standards governance organization that has standardized raw data GNSS Multiple Signal Messages (MSM) formats using Observation State Representation (OSR). OSR simply means the data is in the format of direct satellite measurement observables: Code, Carrier and Doppler measurement specifically. MSM messages are the various generation and message numbers of the raw data formats used.
Networked RTK solutions also broadcast a precise base station coordinate, the RTCM MSM 1005 message. This allows the rover to report its final position in a pre-determined coordinate frame (See Global and Regional Support, page 61). Therefore, the final data user can obtain the position in the local coordinate frame without extra processing steps. These frames are maintained over time, even accounting for the motion of the Earth’s plates. This is crucial in surveying, where references to positional measurements are maintained in public records with an expectation of consistency across generational time periods.
Typically, Networked RTK systems connect a rover to the data stream of the nearest CORS station, so called “Nearest-Base,” or they create a Virtual Reference Station (VRS) by combining multiple CORS data streams into one optimized stream. VRS algorithms enhance accuracy when the rover is more than 20 km from each of the nearby CORS stations.
PPP-RTK
Another positioning engine approach is to combine the concepts of PPP and RTK into a hybrid called PPP-RTK. In this case, regional stations are added to the core backbone of stations used in the pure PPP approach. These regional GNSS stations also facilitate improved modeling of ionospheric disturbances and scintillation caused by solar activity. The ionospheric model, along with the standard PPP SSR corrections, are broadcasted as PPP-RTK SSR corrections. In comparison to pure RTK, PPP-RTK typically spaces stations at 100 to 200 km distances, requiring fewer CORS stations than a corresponding NRTK or VRS service but many more stations than pure PPP.
When comparing to NRTK, both PPP and PPP-RTK based SSR corrections extend the effective range of stations; however, they involve tradeoffs in convergence speed and accuracy. RTK achieves centimeter positioning accuracy for rovers almost instantly. In contrast, PPP typically takes about 20 minutes to achieve centimeter-level accuracy, while PPP-RTK requires several minutes to converge and has slightly less accuracy than a pure RTK solution. GEODNET has entered a partnership with a third party to generate PPP-RTK SSR corrections and make them available as a publicly licensable data product.
GEODNET: A Different Approach
Each station features a modernized GNSS receiver, an NGS-calibrated survey-grade antennae, and tracks all GNSS satellite constellations, including U.S. GPS satellites, Russian GLONASS satellites, European Union Galileo satellites, China BeiDou satellites, Japan’s QZSS satellites and the Indian IRNSS satellites. Unlike many older networks with GPS or GPS+GLONASS only receivers, GEODNET’s modernized full-constellation multi-band receivers include full-coverage of the newest wider-bandwidth GPS L5 signal. The L5 signal and the similar Galileo and BeiDou signals have documented benefits in terms of multi-path reduction due to the signal’s wider-bandwidth and shorter correlation time [2]. The newer signals in combination with the increased number of visible satellites from full-constellation receivers leads to reduced signal acquisition time and a higher-redundancy of measurements for the positioning engine to work with. All these factors work toward a more reliable and accurate source of correction data.
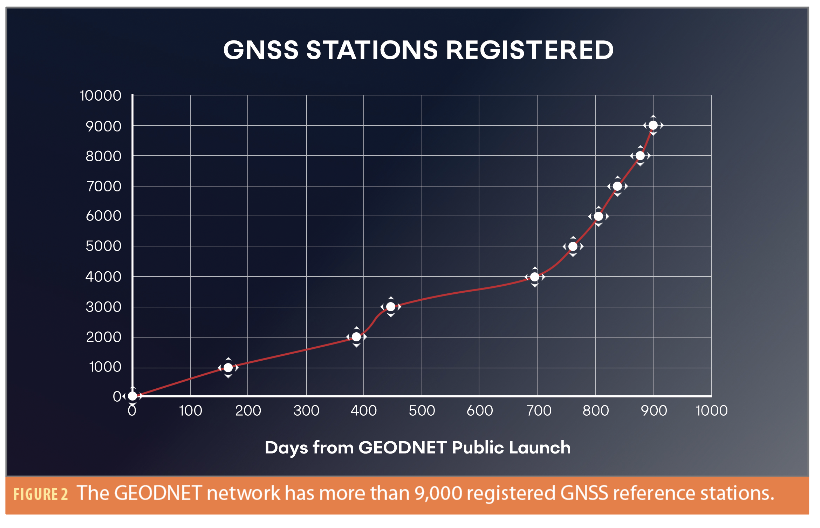
GEODNET GNSS Reference Network Growth
GEODNET has taken a decentralized approach to providing GNSS correction data at scale, delivering a rapidly growing and publicly licensable global CORS station infrastructure. The GEODNET network now stands at more than 9,000 registered GNSS reference stations [1].
Once a GEODNET reference station is registered within the GEODNET network, AI-powered GEODNET servers analyze the quality of uploaded data from each station. These data quality metrics form the foundation of GEODNET’s unique token-incentivized rewards model. The data quality metrics include the total number of satellites and signals tracked, the strength of the signals, the multipath interference caused by the installation environment, and the installation’s station stability. Algorithms within the network detect antenna movements at the millimeter level. The AI-powered algorithms for data quality identification and integrity control play a significant role in providing high-precision correction data along with the integrity required for various applications, such as agricultural auto-steering systems and autonomous driving systems. GEOD token rewards are then proportionally distributed to the station hosts, incentivizing high-quality data production.
An Open and Permissionless Enterprise Platform
Subject only to local geo-political and legal regulations, anyone can add a station to the GEONDET network, and anyone can use the data produced. This “open” and “permissionless” model is one of the unique value propositions of a blockchain-based GNSS correction network.
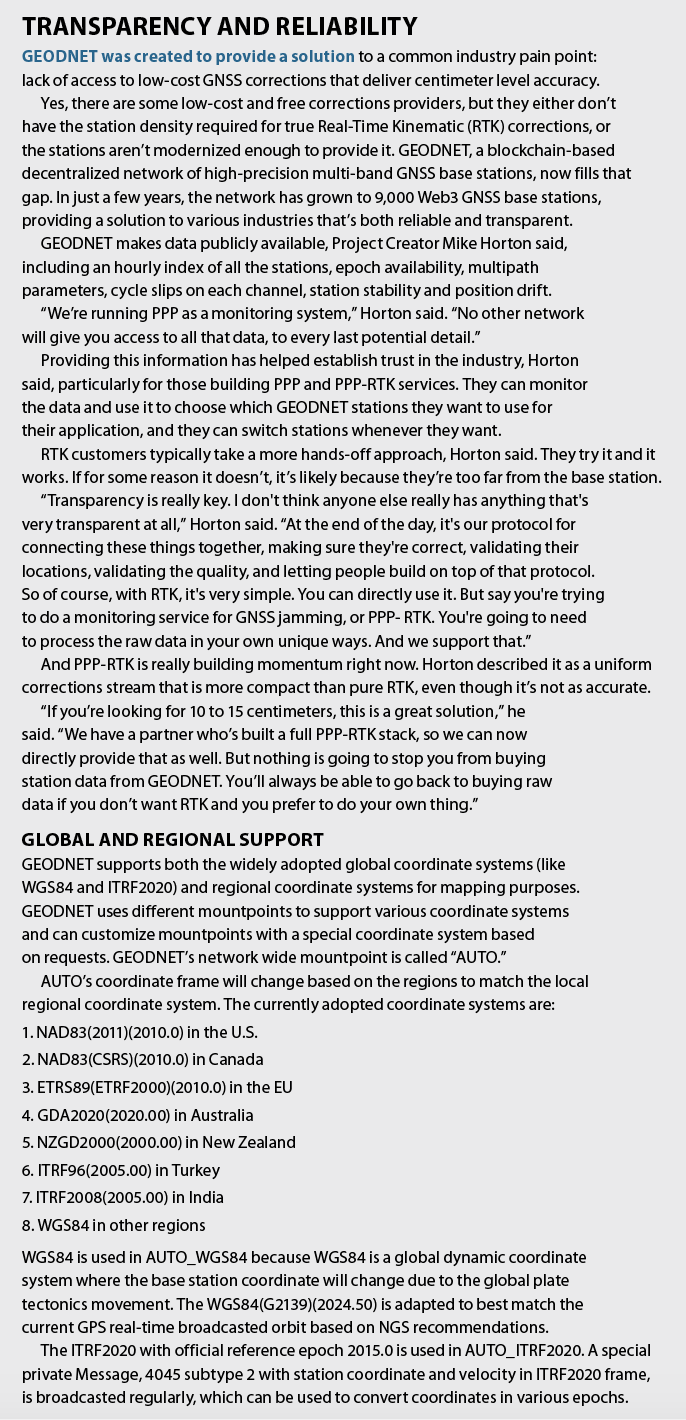
GEODNET provides an enterprise platform and portal that makes it easy for enterprise users and OEMs to manage and distribute GEODNET-based correction data as if they owned the network themselves.
As shown in Figure 3, the enterprise platform gives customers access to an array of powerful capabilities to easily integrate, deliver and manage market-specific GNSS corrections according to their own business needs.
Getting Started with NTRIP
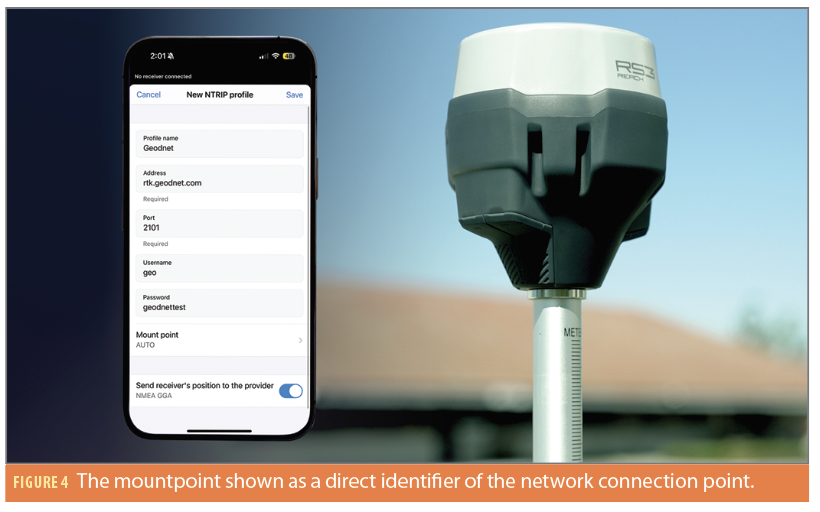
Networked RTK data is most frequently transmitted over the internet via the NTRIP standard; this is the easiest way to get started with precise positioning. Any number of developer kits priced less than $200 are available off the shelf from popular electronic part distributors such as Mouser. GEODNET provides free 30-day trial accounts at geodnet.com/ntrip.
In Figure 4, the mountpoint is a direct identifier of the network connection point. In the simplest implementation, NTRIP bridges the connected GNSS receiver that wants an RTK fix to a base station over a TCP/IP socket. However, in a modern implementation, a network wide mountpoint is used. The network wide mountpoint allows the rover to receive RTK corrections over NTRIP no matter where the device is located. GEODNET’s network wide mountpoint is called “AUTO.” One caveat: Different parts of the world use different local coordinate frames (See Global and Regional Support, page 61.).
Raw Data Streams and Integrity
Developers seeking to build a novel correction service or use post processing software may require raw data streams from stations. This data is also available from the GEODNET network. The GEODNET Station API provides the approximate location of stations. A real-time QC database is populated by using industry-leading software and tools including key hourly metrics for every online station:
1. Station Coordinate Accuracy and Stability
2. Epoch Availability
3. Multipath Metrics by Band
4. Cycle Slips by Signal
Additionally, GEODNET’s global infrastructure continually monitors both station and satellite signal health, providing alerts to users in case of any delivery chain failures. This integrity monitoring system is crucial for setting protection limits and delivering data into safety-critical applications. Any station that is detected to move or fails to meet performance standards is automatically removed from the network.
Account Management
Many RTK users purchase hardware and services from experienced market-specific equipment dealers. GEODNET’s enterprise platform allows these dealers to become for-profit distributors of the GEODNET service. Dealers can offer the service under their own brand and with their own domain branded NTRIP service web address. Dealers can log into a web portal and create and renew accounts for their customers and bill customers through their own pre-existing payment gateways or via GEODNET’s payment gateway, which currently uses PayPal. When using GEODNET’s payment gateway, the dealer receives its share of the service revenue without the need to create and maintain an e-commerce backend for subscriptions.
OEM Developers and API Account Generation
Large volume GEODNET users may need to manage millions of RTK devices at a time. All network management and data services are available programmatically via a dedicated API. While a web portal is convenient for managing up to a few thousand devices, it is not easy to manage large volumes of users and devices. The programmatic API interface allows back-end software to automate this logic without human intervention.
Conclusions
GEODNET is the world’s largest CORS station network by station count and continues to grow rapidly. The open and permissionless usage model enables all participants in the GNSS ecosystem from GNSS chipset developers to end-users to take advantage and participate in infrastructure development. Advanced APIs as well as ready-to-use NTRIP delivered data products provide multiple ways for developers to create services with the terrestrial infrastructure supplied by the GEODNET community. While precise location services such as RTK, PPP and PPP-RTK are obvious applications, the GEODNET infrastructure also can provide data for novel applications in weather research and GNSS jamming detection. The open nature of the GEODNET protocol supports a diverse and growing user base.

References
(1) GEODNET Dune Dashboard https://dune.com/geodnet_console/geod-console
(2) Assessment of GNSS Performance on Dual-Frequency Smartphones https://www.researchgate.net/publication/336455379_Assessment_of_GNSS_Performance_on_Dual-Frequency_Smartphones
Author
As a successful entrepreneur, Mike Horton, GEODNET project creator, is the CTO and Co-Founder of ANELLO Photonics. Prior to ANELLO, he co-founded Crossbow Technology in 1995 and served as CEO until it was sold to Moog Inc. in 2011. He earned a BS/MS in Electric Engineering from UC Berkeley.




