
Today, it appears that the Cospas-Sarsat MEOSAR system, relying on payloads deployed on GNSS constellations (Galileo, GPS, GLONASS), offers all the conditions to meet the new recommendation of ICAO for ADT-system for Commercial Aviation, with a new generation of in-flight triggered beacons, identical to the current ELT in terms of aircraft integration, but capable of receiving triggers and cancellation events from the avionics, from the crew or from internal sensors, and of detecting and managing their inhibitions to maintain the capability to raise alerts and be localized in any situation. In this article the authors address how the Cospas-Sarsat MEOSAR system offers a solution to support the ICAO GADSS Autonomous Distress Tracking Recommendation.
***
Authors: Pauline Martin Thales Alenia Space Thibaud Calmettes Thales Alenia Space Yoan Gregoire CNES Mercedes Reche PILDO LABS Christophe Chatain ECAGROUP Michel Monnerat Thales Alenia Space
On June 1, 2009, the Air France AF447 flying from Paris to Rio experienced a stall that led to the crash of the aircraft in the Atlantic Ocean with 228 passengers and crew members onboard. As the aircraft was transmitting its location nominally only every 10 minutes, the location of the accident site could not be determined with a good accuracy. The search efforts to recover the wreck and the flight data recorder lasted almost 2 years, involving significant aeronautical, maritime and sub-maritime equipment, leaving open the threat that the still unexplained cause of the accident could be at the origin of a similar one in the meantime. Finally, the wreck and the victims were localized in spring 2011 thanks to a submarine robot. The total cost of the operations amounts to more than €34 million, or about $41 million US dollars.
Later, on March 8, 2014, the Malaysia Airlines MH370 flying from Kuala Lumpur to Beijing disappeared with its 239 passengers and crew members. Four years later, the mystery remains despite the more than 33 months of research and the approximate amount of $200 million US dollars spent in the recovering operations by 26 countries. Contrary to the case of the AF447, the MH370 was not even transmitting its location every 10 minutes and all communication links with the aircraft were shut down.
These two tragedies have highlighted the limitations of the existing air navigation and distress systems: with extensive identification and localization delay of the aircraft in distress, the effectiveness of Search And Rescue (SAR) efforts and recovery operations is dramatically reduced. In both cases, no distress messages transmitted by the Cospas-Sarsat Emergency Locator Transmitters (ELT) distress beacons (mandatory on-board any commercial aircraft by International Civil Aviation Organization [ICAO] requirements) were received by the SAR ground segment. The current ELTs are designed to be triggered automatically further to a shock or upon activation by water (typically after a crash or a hard landing on ground or into the ocean) or manually to transmit a distress signal at 406 MHz for at least 24 hours. For flights AF447 and MH370, no alert messages transmitted by the ELT were received. The reasons are still unknown but several hypotheses can be formulated: the transmission system was damaged at the impact and transmission could not occur, or the wreck and the distress beacon sank very quickly before the beacon could transmit its first distress message. Without the alert messages, no information independent of the aircraft systems was available to determine the position of the crash for both the AF447 and the MH370 after all the aircraft equipment failed. To prevent this situation from occurring again in the future, the solution would be to be able to receive information about the location of the aircraft during the in-flight distress phase. Based on this, ICAO and the international aeronautical community carried on activities to reconsider the effectiveness of the existing SAR operations by improving the in-flight tracking of the aircrafts during the entire flight and under all circumstances, including normal flight and distress. The activities of the Ad-hoc Working Group on Aircraft Tracking led to the definition of a Global Aeronautical Distress and Safety System (GADSS) and additional amendments to the ICAO Annex 6 divided into 3 functions (Figure 1):
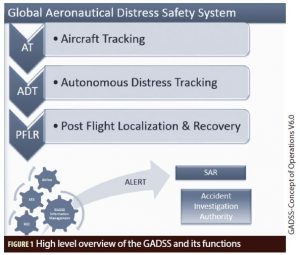
• Aircraft Tracking (AT): transmission of data of time and position or information to determine the position of the aircraft at least every 15 minutes during normal flight phase
• Autonomous Distress Tracking (ADT): transmission of time and position or information to determine position of the aircraft at least every minute during in-flight detected distress phase
• Post Flight Localization and Recovery (PFLR): localization of flight data recorders thanks to beacons associated to the FDR.
The ADT function requirement is the answer to the AF447 and the MH370 accidents and its necessity has been confirmed by other aeronautical accidents (like the Egyptair MS804): by initiating the tracking of the aircraft during in-flight distress phase and with the availability of transmitting accurate time and position data, the probability to receive a distress message is increased, as well as the accuracy of the location of the crash area. The evolution of the Cospas-Sarsat system, mandatory onboard all commercial aircraft, into an ADT system appeared as an appropriate solution and is further described in the following sections.
Cospas-Sarsat Solution to ADT Recommendations
a. The Cospas-Sarsat program
The International Cospas-Sarsat Program provides accurate, timely and reliable distress alert and location data to help SAR authorities assist persons in distress. The objective of the Cospas-Sarsat system is to reduce, as much as possible, delays in the provision of distress alerts to SAR services, and the time required locating a distress and providing assistance, which have a direct impact on the probability of survival of the person in distress at sea or on land. To achieve this objective, Cospas-Sarsat Participant governments and agencies implement, maintain, coordinate and operate a satellite system capable of detecting distress alert transmissions from radio-beacons that comply with Cospas-Sarsat specifications and performance standards, and of determining their position anywhere on the globe. The distress alert and location data is provided by Cospas-Sarsat Participants to the responsible SAR services. Cospas-Sarsat cooperates with the ICAO, the International Maritime Organization (IMO), the International Telecommunication Union and other international organizations to ensure the compatibility of the Cospas-Sarsat distress alerting services with the needs, the standards and the applicable recommendations of the international community. It is today the most important worldwide rescue system, having been used from 1982 to December 2016 to provide assistance in rescuing at least 43,807 people in 12,664 events.
From the beginning, Cospas-Sarsat has been integrated to aircraft safety and security systems with two types of beacons: ELT (Emergency Locator Transmitter), attached to the aircraft and mandatory in most of them; and PLB (Personal Locator Beacons), attached to the pilot, widely spread in general aviation. Aviation domain today represents 20% of the 2 million deployed beacons. In 2016, the Cospas-Sarsat system answered to 876 SAR events (177 distresses were related to the aviation domain); contributing to save 2,057 lives (355 lives involved in aeronautical SAR events). Thanks to the efficient communication link between the Cospas-Sarsat Mission Control Centre (MCCs), and the Rescue Coordination Centers (RCCs), the ground operational segment of Cospas-Sarsat in general, and the aeronautical branch in particular, has reached the rank of the most performing SAR system as Cospas-Sarsat has been involved in half of the distress events managed by RCCs around the world.
Over the last 34 years, with 30 operational MCC deployed in 30 countries all around the world, and more than 100 RCC/SPOC, Cospas-Sarsat consolidated its international SAR network and earned a rich experience in coordination of information and rescue means in all the events it treated. Every year, new countries join the program and contribute to the Cospas-Sarsat ground segment.
Today, the Cospas-Sarsat space segment is composed of five satellites in Low-Earth Orbit, eight satellites in Geostationary Orbit, and 37 satellites in Medium Earth Orbit, equipped with SAR payloads to receive and forward distress messages broadcasted by the Cospas-Sarsat SAR beacons. The Cospas-Sarsat system is free of charge for the user and entirely financed by the partners of the program.
Figure 2 illustrates the nominal operation chain of the Cospas-Sarsat system and the Return-Link use (violet arrows); the three space segments of Cospas-Sarsat are represented: the Low Earth Orbit SAR (LEOSAR) space segment, the Medium Earth Orbit SAR (MEOSAR) space segment and the Geostationary orbit SAR (GEOSAR) space segment:
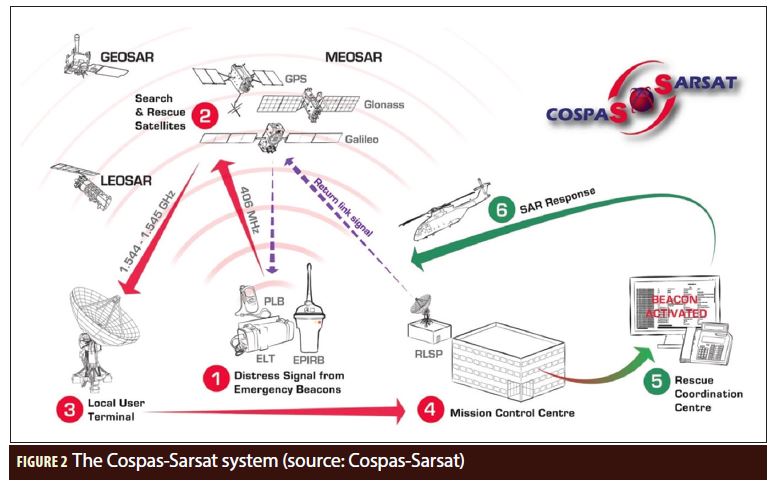
1. Distress beacons are activated by aircraft (ELT and ELT(DT)), ships (EPIRB: Emergency Position Indicating Radio Beacon) or individual users (PLB: Personal Locator Beacon)
2. The SAR payloads aboard Cospas-Sarsat satellites (including Galileo satellites) relay the alert to LUT
3. The Local User Terminals (MEOLUT, LEOLUT and GEOLUT) detect, demodulate and localize the distress beacon signals
4. The LUT forwards the alert data (including the independent location computed by MEOLUT and LEOLUT) to the appropriate MCC (i.e. the MC in charge of the area where the beacon is localized)
5. The Mission Control Centres (MCC) distributes alert data to Rescue Coordination Centres (RCC)
6. RCC organizes and coordinates SAR services and operations
In addition, each Cospas-Sarsat beacon can be localized either thanks to the position encoded in the alert message transmitted or by the independent localization of the alert provided by the Cospas-Sarsat ground segment. This independent localization is based on the capacity to localize the beacon that transmitted the signal based on the reception characteristics of the signal by the Cospas-Sarsat ground segment. With the LEOSAR system, it relies on the Doppler effect but requires several bursts and is disturbed by the beacon motion, with the MEOSAR system relying on the Frequency of Arrival and Time of Arrival of the signal and basically consists in a triangulation just like what is done with GNSS. It eliminates the risks linked to GNSS, as the SAR operators dispose at any time of an estimation of the location of the beacon.
b. ELT(DT) used in the MEOSAR system
In parallel of the MEOSAR evolution, Cospas-Sarsat is also developing new standards of beacons:
• ELT(DT) (Emergency Locator Transmitter for Distress Tracking) a special type of beacon designed to be activated in flight as soon as a distress situation is detected
• SGB (Second Generation Beacons) specially optimized for MEOSAR system and offering an improved performance (detection and independent localization accuracy) compared to current beacons. SGB standard will cover all types of Cospas-Sarsat beacons.
ELT(DT): the Cospas-Sarsat ADT Solution
In order to answer ICAO requirement of Annex 6 for ADT, Cospas-Sarsat has been working on a new beacon standard named ELT(DT). Compared to other types of beacons used in Cospas-Sarsat (EPIRB, ELT, PLB), ELT(DT) has been designed for a particular use case: being activated in flight upon a distress situation. This use case involves additional constraints that were taken into account during the specification phase:
• Based on BEA (Bureau Enquête et Analyse: French Office for Aeronautical Accidents Investigation) studies, it appears that in many cases an aircraft will impact the surface within just a few minutes after the detection of the distress situation. At impact, the beacon and/or the external antenna on the fuselage may be destroyed or the aircraft may sink underwater. In both cases, it is no longer possible to receive signals from the beacon. It was then determined that the beacon has to transmit its signal as soon as a distress situation is detected and until the crash, with a repetition rate high enough to get a sufficient detection probability at ground stations and to make sure that the last burst is not too early before the crash:
■ Transmission of the first burst 5 seconds after reception of the trigger (manual or automatic)
■ A repetition rate of:
• 5 seconds during the first 120 seconds after activation
• 10 seconds after the first 120 seconds and before 300 seconds after activation
• 30 seconds after 300 seconds after activation
• A special transmitted message was designed to indicate at least:
■ The trigger which activated the beacon (automatic trigger or manual trigger)
■ The encoded location from an integrated GNSS receiver
Last but not least, one can note that the MEOSAR system is well suited to process ELT(DT) signals as it allows instantaneous detection and global coverage. MEO satellite visibility offers redundancy then allowing for a high detection rate of the signals. Moreover, if a signal is detected through a sufficient number of satellites, the ground station can compute an independent location associated with speed estimation. Finally, completed by an internationally well-known ground segment for the distribution of the alerts between countries and geographical areas, Cospas-Sarsat offers an efficient solution to ADT.
Another advantage of the Cospas-Sarsat solution is the possibility to combine the ELT(DT) function with a legacy ELT beacon which triggers on crash. Into a single device, it is then possible to answer to both ICAO requirements for ADT and for ELT with minimum evolutions on the aircraft. The specification for this combined solution is currently refined in standardization bodies, in particular in terms of use of homing signal and battery duration, but this would be a significant additional advantage of the solution. To comply with existing environmental and test conditions (lightning, radiofrequency, altitude, pressure, shocks, vibration, fire, transmission duration), ELT(DT) also have now to comply with recent aeronautical standards (DO 160, ED 162) and quality standards: REACH, ROHS, EMC and ESD including documentation, being understood that those requirements have to be fulfilled without any compromise on product availability and reliability, offering ELT(DT) with higher performance requirements.
The Cospas-Sarsat ADT solution has been defined and specified in aeronautical standardization bodies for Europe (EUROCAE) and North America (RTCA) through documents ED-62B and Doc10054, under consolidation and with an expected closure date by June 2018. Currently, it is the only ADT system for which such specification exists, which should ease the support to its adoption.
MEOSAR: Enhancing Location Performance
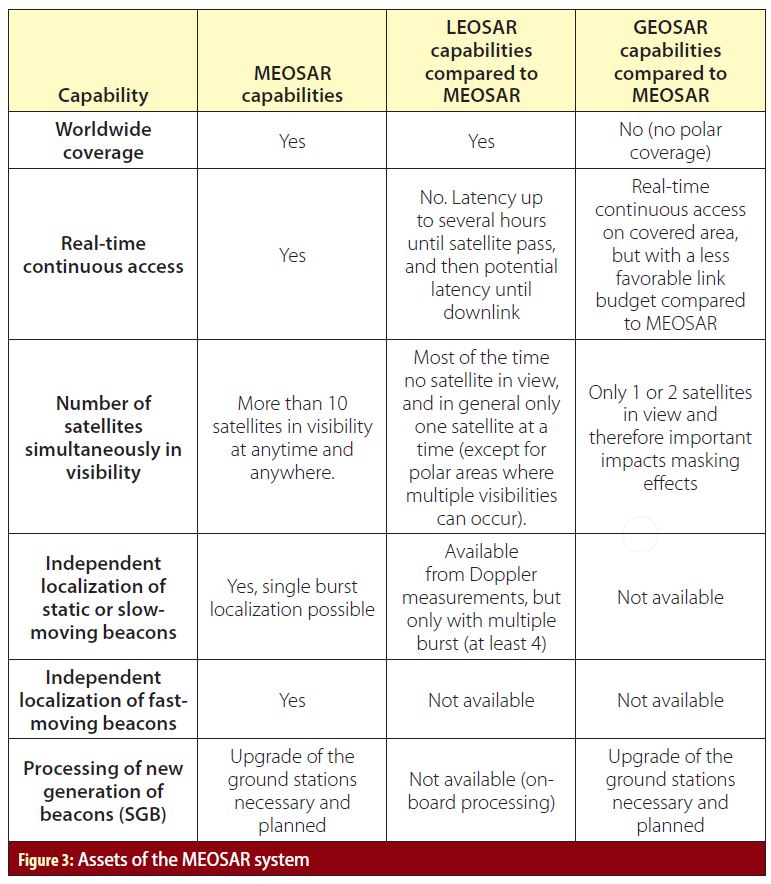
The MEOSAR system will be interoperable with the current 1.9 million deployed First Generation Beacons. While the LEOSAR and GEOSAR systems have been used for decades, the MEOSAR system just entered in early operations capability in December 2016. The evolution towards MEO orbits is supported by GNSS constellations (Galileo, GPS and GLONASS and future plans for BeiDou) equipped with payloads that relay the distress signals towards ground stations (MEOLUT). MEOSAR uses a different approach compared to LEOSAR. While LEOSAR relies on a multiple burst location method, exclusively based on accurate frequency measurements, MEOSAR relies on instantaneous spatial diversity (reception of the same burst by multiple satellites) and uses both time and frequency measurements (TOA: Time Of Arrival, FOA: Frequency Of Arrival) to compute a location. Then, compared to LEOSAR, the new location method used in MEOSAR allows:
• Localizing a beacon with a single burst
• Localizing a beacon that is fast moving
This transition will increase the quality of service of the Cospas-Sarsat service, with several key added values compared to LEOSAR and GEOSAR system:
• Worldwide real time detection
• Instantaneous independent localization (localization without reliance on the possible GNSS receiver of the beacon, but based instead on the characteristics of reception of the beacon signal by the SAR system itself) with improved accuracy
• Opportunity to implement the Second Generation Beacon (SGB)
The MEOSAR system opens many new possibilities:
• The beacon may be activated and independently localized in-flight, even in single-burst and even when fast-moving and at high altitude.
• The beacon is continuously tracked after activation, during the complete descent phase, so that rescue teams may be continuously aware of the trajectory evolution. The last burst, just before crash, is also known and localized, which is crucial for the evaluation of its position.
In addition and in parallel of the MEOSAR evolution, the Galileo system introduces the Return Link Service which offers a new feature: the possibility to acknowledge to the user of a beacon the reception of the distress message transmitted and therefore inform them that the alert and its location are processed. This is called the Type-1 RLM. Although Type-1 RLM is the only use case that has been agreed yet by SAR authorities, the Return-Link capability opens several other possibilities to contribute to SAR operations improvement that will be analyzed within a EUROCAE Working Group 98 in 2018, such as:
• A dialog between the ground systems and the beacon, to adapt the transmission periods, the beacon message, and to create system monitoring solutions. A particular dialog case is the switch-off after cancellation, thanks to acknowledgement logic. This switch-off is very important to create autonomous cancellation capacity, as it avoids maintaining alerts if the situation has gone back to normal, and therefore reduces the used bandwidth and prevents from system overcapacity.
• The Return-Link may be used for remote activation. This is particularly useful if the aircraft disappears from other communication systems as the beacon is autonomous (works if everything else in the aircraft is off). Such remote activation could in particular have been used for MH370 flight disappearance.
Cospas-Sarsat operators have expressed their requirements in terms of SGB performance. These requirements are described in document Cospas-Sarsat G.008 “Operational Requirements for Cospas-Sarsat Second-Generation 406-MHz Beacons” that is accessible on the Cospas-Sarsat website. A detailed presentation of SGB specifications and performance can be found in Additional References, and the key improvements are recalled here:
• Better detection performance thanks to a stronger error correcting code
• Increased message content with flexible structure allowing the transmission of information through multiple burst
• Increased TOA measurement accuracy thanks to the use of a spread spectrum modulation, allowing more accurate locations
In particular, the improvement of TOA accuracy compared with FGB characteristics allows reaching the same location accuracy for static and moving beacons. In other words, while TOA and FOA measurements have to be used jointly to estimate the location of an FGB in order to get sufficient location accuracy, the use of TOA only is sufficient for SGB and typically improves the location accuracy by a factor of 10. Since TOA is not affected by the beacon speed, the SGB independent location, which mainly relies on a significantly improved TOA measurement, is also independent of the beacon speed, which is a great asset for independent location of ELT(DT). With accurate and reliable TOA-only position estimation, it becomes interesting to use FOA measurements for beacon instantaneous speed estimation.
The MEOSAR system is also improving the Cospas-Sarsat global performances thanks to the continuous increase of tracking capability on the ground stations (called MEOLUT), with the deployment of new stations in the world (12 commissioned as per today): the addition of dish-antennas to some of them, or deployment of phased-array antennas (see Figure 4). This last solution, deployed as the operational French MEOLUT since 2016, provides the capability to track in parallel all satellites in view instead of selecting some of them pointed by a few dish-antennas: as we are dealing in the end with all GNSS constellations, it will represent up to 30 satellites tracked in parallel.

The gains provided by a higher number of simultaneously tracked satellites are multiple:
• increased probability of detection of the beacon signal through at least one satellite
• higher chances to receive the beacon signal bursts through at least three satellites, enabling the computation of an independent location
• More TOA/FOA measurements, and then a better accuracy on the independent location.
The ground segment is then continuously improved to get real-time access to more satellites relaying alerts from larger areas, as part of the first and most important requirement of the MEOSAR system in Cospas-Sarsat. In the frame of ELT(DT), this objective of improving the performance is particularly important:
• The beacon may only transmit a few bursts before crash: the detection and location probability per burst shall be particularly high
• The beacon localization adds new unknowns: the altitude (usually considered on ground for other beacons, including current ELTs that are triggered by the crash) and/or the speed (in particular for FGB where it impacts the FOA and then the overall accuracy). Even if some default calculations can be implemented which provides quite satisfying results, the access to additional measurements through a fourth satellite is particularly interesting and significantly improves the independent location accuracy. The access to a fifth or sixth — or more — satellite allows to even refine the location performance accuracy.
c. The pre-operational MEOSAR-system used to localize an in-flight activated beacon: the MS804 accident
On May 19, 2016, the MS804 flying from Paris to Cairo crashed into the Mediterranean Sea with 66 people onboard. Unexpectedly, the distress beacon of the aircraft (a standard ELT) transmitted two test messages at 00:36:52 and 00:36:59. These two messages were received after radar contact was lost and a few minutes after the reception of the last ADS-B message, probably several seconds before the crash.
The two messages were received by several SAR satellites of the Cospas-Sarsat space segment:
• 2 GEO satellites: MSG-2 (tracked by the Greek and Turkish GEOLUTs) and MSG-3 (tracked by the French GEOLUT)
• 10 MEO satellites: GPS (PRN 1, 3, 9, 17 and 23), Galileo (PRN 8, 14, 20 and 26) and GLONASS K1-2, received by MEOLUTs in Cyprus, France, Norway, Russia, Spain, Turkey, and USA.
The first message was received with very low signal to noise ratio, therefore, only the second one could be used. The beacon model was not equipped with a GNSS receiver, thus no position was encoded in the alert message. Some MEOLUTs could compute an independent location based on TOA/FOA measurements using standard location algorithm (i.e. not taking into account the fast motion of the beacon) but these locations were highly inaccurate (more than 200 kilometers away from the crash site). An analysis conducted by CNES using location algorithms adapted to fast motion allowed to compute a better location, a few hours after the accident. This information was promptly transferred to search teams and was used to localize the wreck and quickly recover the flight recorders.
Although this accident did not involve the use of an ELT(DT), it demonstrates the ability of the MEOSAR system to provide reliable information to find the accident site in a timely manner.
GRICAS: Providing an Innovative Solution
From the beginning of the MEOSAR system, the European Union (EU) has been deeply involved in the deployment, promotion and enhancement of the system. On one hand, the EU contributes to the space segment of the MEOSAR system with SAR payloads onboard each and every satellite of the Galileo constellation and constituting the Galileo SAR service. On the other hand, EU, via its institutions like the European Commission (EC) or the European GNSS Agency (GSA), every year funds several research and development projects working on the development of the MEOSAR services and the design of new SAR services relying on the Galileo SAR: GRICAS, HELIOS, MAGNIFIC, SAT406M, GRIMASSE, SINSIN, iSSAR… Among those projects, the GRICAS project (Galileo SAR Return-Link Improvement for a better Civil Aviation Safety) is funded by the GSA under the European Union Horizon 2020 Research and Innovation program (grant agreement no. 687556). Initiated in February 2016, it was to be concluded in April 2018 and gathers a consortium of seven companies and administrations from France (CNES, Thales Alenia Space and ECA GROUP (with its brand ELTA), Italy (STMicroelectronics), Spain (PildoLabs, Aeroclub Barcelona Sabadell) and Africa (ASECNA the Agency for Aerial Navigation Safety in Africa and Madagascar). The main objective of the project is to demonstrate the compliance of the Cospas-Sarsat MEOSAR system to the requirements of the Autonomous Distress Tracking function of the GADSS developed by ICAO. In 2017, all the developed operational concepts have been demonstrated through a set of in-flight trials in Europe, testing in particular the first Cospas-Sarsat ELT(DT) (Emergency Locator Transmitter for Distress Tracking) developed for the project. The definition of the operational concept is based on the ED-237 MASPS published by EUROCAE Working Group 98 and the solution proposed is compliant with Cospas-Sarsat specification documents.
d. An operational concept that covers all distress situations taking into account consequences of the distress on the cockpit crew
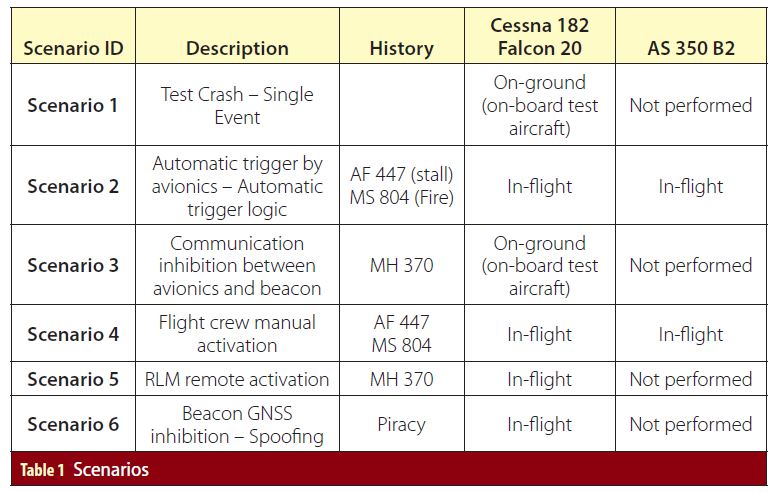
GRICAS operational concept is based on three main distress scenarios:
• the automatic activation by avionics upon detection of one or several distress situations such as:
■ Criteria defined by EUROCAE as mandatory:
• unusual attitude
• unusual speed
• unusual altitude
• total loss of propulsion
■ Additional criteria identified as relevant by the GRICAS project:
• transponder codes (7500, 7600, 7700)
• fire
• depressurization
• the manual activation by crew
• the manual remote activation from ground through the Galileo Return-Link Service (not required by ICAO at this time).
Based on these scenarios, the solution design requires:
• a new type of Cospas-Sarsat aeronautical distress beacon called ELT(DT)
• an ELT continuously armed and tracking GNSS with its own internal GNSS receiver (GPS + Galileo):
■ The ELT is always ready to be triggered to transmit a distress message as well as the needed data to be localized, as soon as a distress situation is detected.
■ The bi-constellation function of the GNSS receiver also offers robustness to spoofing and jamming on GPS signal
■ beacon can receive an activation command sent via the Galileo Return-Link
• continuous power supply by the aircraft and a 24-hour autonomy at 406 megahertz thanks to the internal and rechargeable battery
• The shape, size and weight of this ELT(DT) are similar to the standard ELT’s already commercialized.
Moreover, the designed solution offers a strong robustness to possible attempts in tempering the system with:
• robustness to GNSS spoofing: the beacon independent location is computed thanks to the beacon signal characteristics, independently from the message content or availability of GNSS onboard the aircraft, and specific spoofing detectors are implemented together with the beacon internal GNSS to ensure that such attempt triggers the SAR transmission. The beacon can then start transmitting in case of GNSS unavailability (jamming) or unreliability (spoofing), and will then be localized by Cospas-Sarsat MEOSAR independent localization, which will then become the only remaining solution to localize the beacon. To increase the gain of this capability, the beacon transmission implements the Second Generation Beacon waveform, which provides a more accurate in-flight independent localization
• the acknowledgment from the ground under the responsibility of RCC to avoid fake cancellation of a manually triggered ELT, to avoid ill-intentioned cancellation.
In addition, human factors have become more and more important in recent years in the design of aeronautical systems, and the GRICAS project took these studies into account and implemented a manual acknowledgment from the cockpit crew to be requested in case of automatic activation by avionics, before the avionics send the cancellation command to the beacon. Thus, the pilots can confirm they are back in control of the flight in addition of the flight dynamics criteria characterizing a normal flight situation.
From the beacon point of view, the Cospas-Sarsat ELT(DT) designed for the GRICAS project to comply to the Autonomous Distress Tracking recommendations is identical to currently commercialized and operated ELT’s in terms of electronic components, mechanical and functional interfaces (with an additional interface for the automatic activation). However, this new ELT with Distress Tracking functionality benefits from a new design fitting with aeronautical ADT requirements:
• It implements the new modulation, called Second Generation, of the Cospas-Sarsat system specifically designed to maximize the performances of the MEOSAR system.
• It integrates an internal Galileo compatible GNSS receiver that is continuously turned on:
■ to provide a source of localization, independent from any other aircraft systems
■ to be able to receive any Galileo Return Link messages
■ to be able to identify spoofing or jamming attempts on the GNSS signal
• During normal flight conditions, the ELT(DT) is armed and monitors information
■ From a beacon activation logic that computes the automatic triggers based on detection of a distress situation
■ From the Galileo navigation signal to identify a RLM with its ID encoded and to process the RLM as appropriate (activation for example)
■ From the avionics: the position provided by the avionics GNSS receiver to encode it in the distress or cancellation message when the beacon is activated
• It starts transmitting within five seconds upon reception of triggering command (either manual, automatic or from a remote RLM activation command)
• It is powered by the aircraft main power bus and by an internal rechargeable battery. This double power supply source enables the ELT(DT) to continue to operate when there is a total loss of power onboard and for the whole remaining flight (up to 24 hours).
e. A fully independent solution for distress delivery in all situations
The operational concept and the solution design proposed by GRICAS ensures the ELT(DT) mission not be affected by a communication link inhibition with the avionics, a loss of communication with the aircraft’s GNSS receiver, or even a GNSS jamming or spoofing in the vicinity of the aircraft.
Finally, the ELT(DT) can be triggered in a completely independent process without any inhibition risk thanks to the manual remote activation from ground by Return-Link Message. This service could be provided to airlines, which will be able to request a remote activation (and deactivation) to the Return-Link Service Provider, knowing that the activation of the ELT(DT) will set off a distress at the RCC responsible for the area.
f. Flight trials
All the operational concepts developed within the GRICAS project have been demonstrated through a set of real-time in-flight trials:
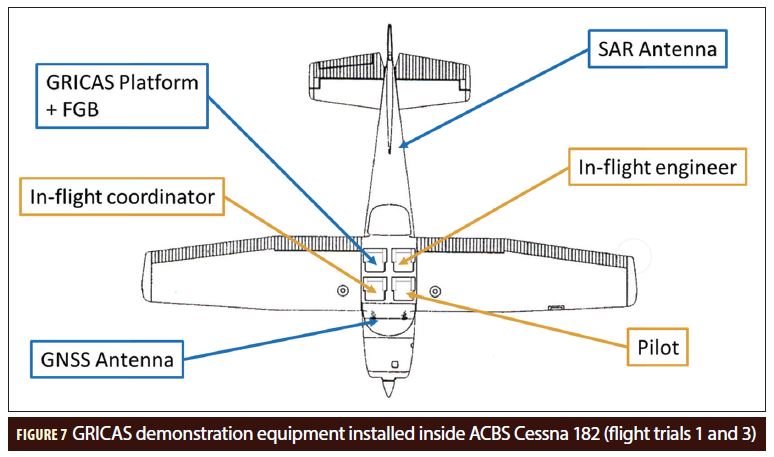
• A first campaign, called “ELT(DT) field trial” performed in Sabadell, Spain, onboard a Cessna 182 in April 2017. It was meant to be an in-flight dry-run of the future flight trials and was dedicated to the adjustment of the test equipment. All the test scenarios were performed in-flight and the first in-flight independent localization using the MEOSAR system was realized, with results even better than expected.
• A second campaign, called “in-flight RLS field trial” performed in Sabadell, Spain, onboard a Cessna 182 in November 2017. Its objective was to test the Return-link Service (RLS) user cases defined in the GRICAS operational concept with the pre-operational RLS Provider (RLSP).
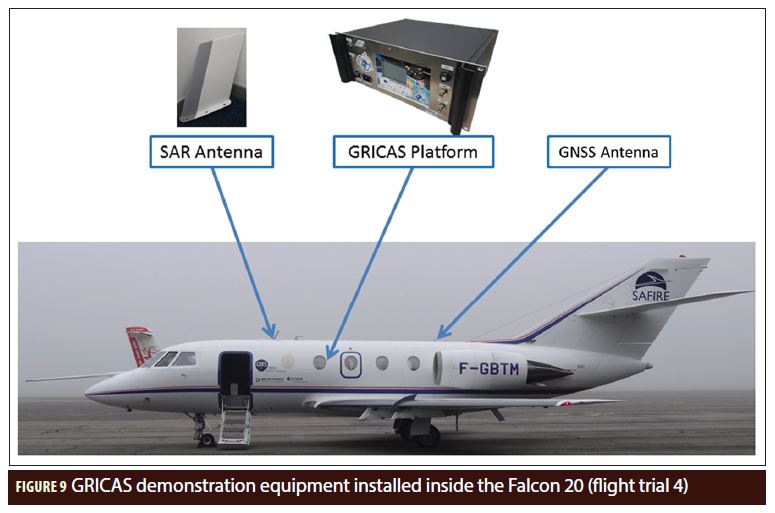
• A third campaign, called “Commercial aviation field trial” performed in Toulouse, France, onboard a Falcon 20 of SAFIRE (The French Service of Instrumented Aircraft for Environmental Research) early December 2017. Its objective was to test the GRICAS SGB ELT(DT) onboard an aircraft offering a flight domain similar to the one of an aircraft dedicated to commercial flights (as targeted in GADSS). The Falcon 20, with its 800 km/h cruise speed and 10 kilometer cruise altitude was a perfect test aircraft for this flight trial.
• A fourth flight trial, called the “Final Commercial Aviation field trial”, performed in February 2018 in Dakar, Senegal, onboard the ATR 42 test aircraft of ASECNA. It was a field trial mostly dedicated to dissemination activities around the Cospas-Sarsat compliance to ADT requirements and the improvement of SAR in Africa.
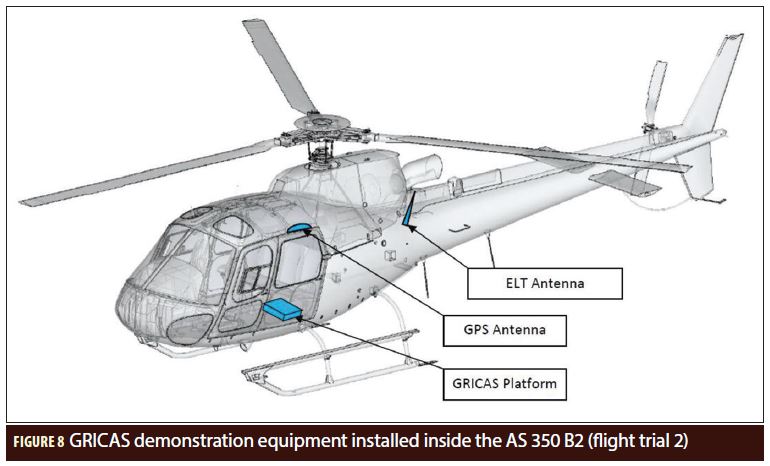
In addition, a helicopter field trial was performed in July 2017 in Graulhet, France, onboard an AS 350 B2 Eurocopter “Squirrel” helicopter. It aimed at initiating work on addressing the problem of ELT(DT) designed for rotorcraft.
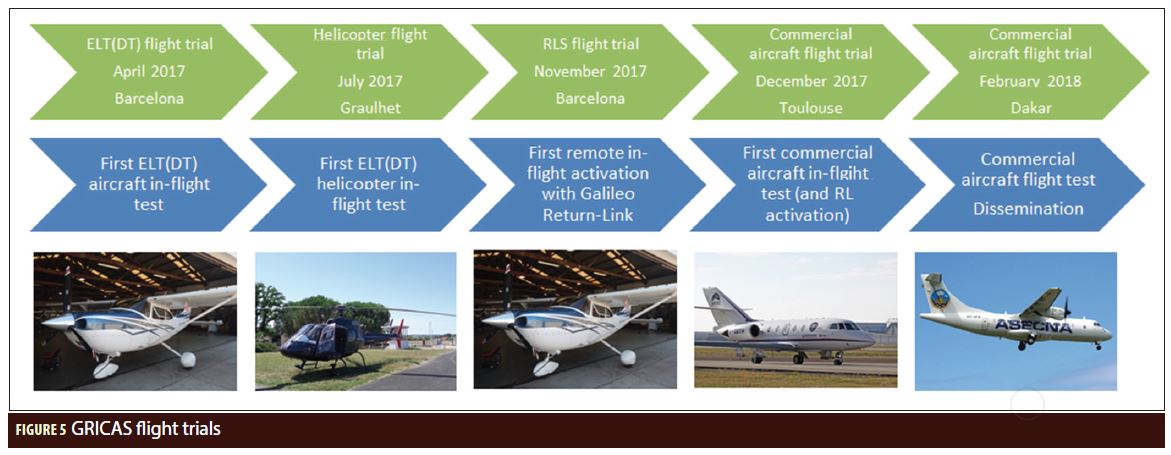
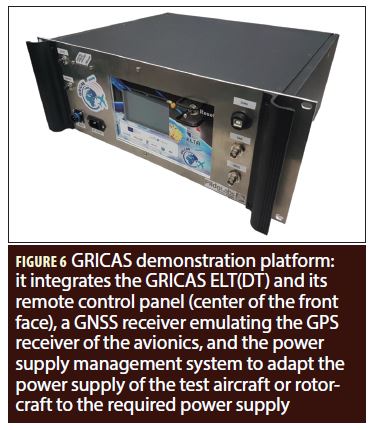
For these campaigns, a dedicated platform was developed by PildoLabs in the frame of the project, following the standards and best practices used for laboratory equipment devices that are carried out in research aircrafts (see Figure 5). This demonstration platform contains as main equipment the Second Generation ELT(DT) developed by ELTA, a Remote Control Panel to monitor the beacon status and an EGNOS GNSS receiver to be used as the beacon’s position external reference. The platform was temporarily installed in the aircraft during the flight campaigns and connected to the SAR antenna, as it can be seen in Figures 6-8. The manufacturer also developed an emulator of the Beacon Activation Logic that sends the automatic activation command to the beacon when triggering criteria are met.
The flight tests performed during the project are unique in many aspects:
• It was the first time that an ELT(DT) prototype, representative of what a real ELT(DT) could be, flew onboard airplanes and a helicopter, and was automatically triggered in-flight.
• It was the first time an independent localization of a second generation Cospas-Sarsat beacon was computed during a transmission on-board a flying aircraft and helicopter.
• It was the first time that the Galileo SAR RLS was used to remotely activate an ELT(DT) aboard a flying aircraft.
• Finally, it was also the first time first and second generation beacons modulated distress messages transmitted onboard a flying aircraft were recorded (in the same test environment) to provide consistent data to compare the relative performances of both modulations for independent localization of fast-moving beacons.
Scenarios
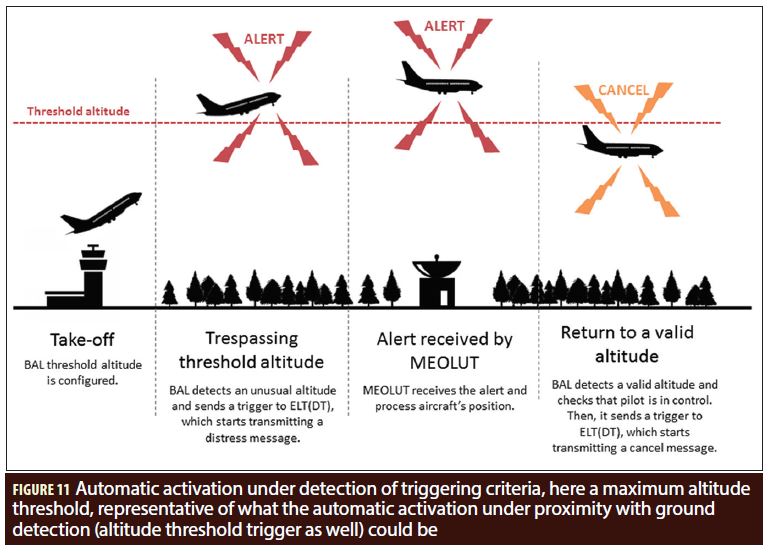
The attention of the reader is drawn to scenario 2 (see Figure 9) which is completely automatic. Indeed, for this scenario the beacon was automatically triggered by a Beacon Activation Logic (BAL) based on GNSS information on the flight altitude of the test machine. For the sake of simplicity, the BAL used computed an automatic trigger based on an altitude threshold (instead of proximity with ground); the reader will anyway note the representativeness of the automatic activation process. After take-off, the test pilot pursues the ascent until overtaking a threshold altitude (agreed with the GRICAS engineers and encoded as the threshold altitude in the BAL). The BAL, collecting the position data provided by the GNSS receiver of the demonstrator (emulating the GNSS receiver of the avionics for the tests), identifies the unusual altitude, computes a trigger “Unusual altitude” and sends it to the ELT(DT) prototype. The ELT(DT) prototype receives the trigger and starts transmitting a distress signal with the relevant activation method encoded in the Rotating Field #1. The MEOLUT receives and processes the signal. It computes in real time a single and multi-burst independent location and delivers the alerts to the test ground engineer. Finally, after 5 to 20 minutes (depending on the test case), the pilot flies again under the threshold altitude, the BAL checks that the pilot is in control, then computes a cancellation trigger, the beacon starts transmitting a cancellation message. The cancellation messages were well received, processed and delivered to the test ground engineer by the MEOLUT.

Results
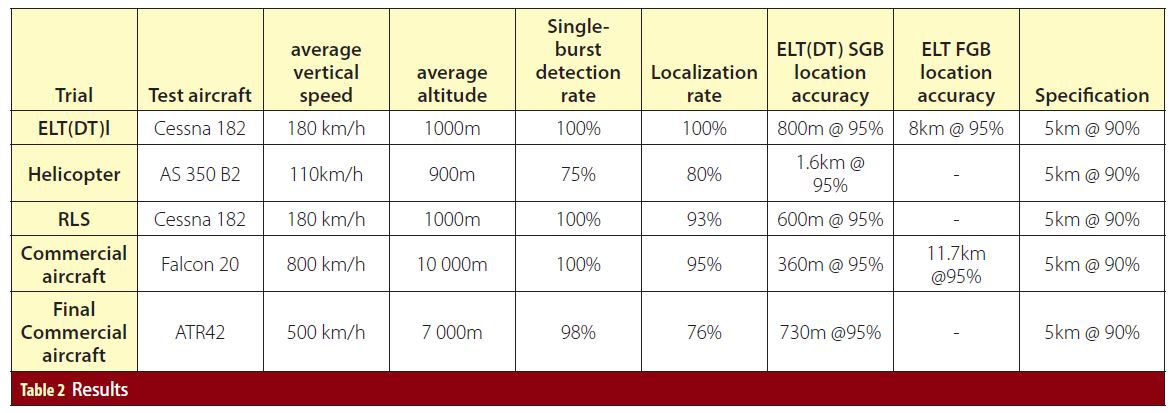
The independent localization accuracy of the ELT(DT) prototype based on Cospas-Sarsat second generation wave form is very good, with single-burst accuracy at 90% of 800 meters and at 95% of 850 meters. It is significantly better than the target performances for second generation beacon specified in Cospas-Sarsat documents: 5 kilometers @ 90% and 13 better than the performance obtained for an ELT based on first generation wave form.
In the case of the Final Commercial aircraft tests, the flights took place outside of the declared Coverage Area of the French MEOLUT (Toulouse, France) used for the tests (in Dakar, Senegal, 3,600 kilometers far from Toulouse, whereas the coverage area is a 3,000-kilometer-radius circle centered on Toulouse), i.e. outside the area where the performances of the MEOLUT are guaranteed. The performances obtained are very good considering the constraints on the tests.
The performance accuracy is a bit lower for the helicopter tests which can come from the interferences observed between the engine and the antenna used to transmit. Further tests will be performed in 2018 and 2019 onboard helicopters with adapted beacon and antenna solution.
The Beacon/MEOLUT Latency
During the field trial, the latency was inferior to 20 seconds between the activation of the beacon and the delivery of the demodulated, independently localized and interpreted signal to the operator on testing site emulating the MCC. This means that the Cospas-Sarsat MEOSAR based ADT solution can pretend to be a real-time flight distress tracking solution that would dramatically improve the efficiency of the SAR operators with a typical overall latency of one minute for the delivery of the distress message to the operators.
Conclusion
Today, it appears that the Cospas-Sarsat MEOSAR system, relying on payload deployed on GNSS constellations (GPS, Galileo, GLONASS), offers all the conditions to meet the new requirement of ICAO for ADT system for Commercial Aviation, with a new generation of in-flight triggered beacons, identical to the current ELT in terms of aircraft integration, but capable of receiving triggers and cancellation events from the avionics, from the crew or from internal sensors, and of detecting and managing their inhibitions to maintain the capability to raise alerts and be localized in any situation. The redundancy of the localization information (GNSS position encoded in the message and independent MEOSAR localization), the gratuity of the service, the worldwide instantaneous coverage of the space segment and the worldwide coverage of the ground segments guarantee a high quality of service and performances that will contribute efficiently to improve air navigation safety.
Thanks to projects like GRICAS, SAR and aeronautical authorities have a common understanding on the fact that MEOSAR is a strong, reliable system to ensure commercial flight safety. The space segment is currently performing well and, while it is still under deployment, it has already demonstrated its capability to contribute to SAR operations for aeronautical events. The aircraft segment is migrating to benefit from this space segment and the existing SAR ground segment is providing strong results and migrating to the MEOSAR system. However, to fully embrace the MEOSAR evolution and as new operational needs appear, an improvement of the ground segment (MCC, RCC) is required and will allow the MEOSAR system and the Galileo SAR service to reach their maximal potentials. To this extent, EUROCAE will initiate mid-2018 activities to define a Minimum Aviation System Performance Specification for Aircraft Emergency Locator Transmitter Return Link Service including but not restricted to remote activation of ELT(DT), command to modify the content or transmission rate of the distress message and acknowledgment of reception of beacon messages.
In parallel to the on-going development of an ADT solution for commercial aviation, it is not foreseen to extend the ADT to general aviation. General aviation’s needs offer very specific challenges in terms of ADT:
• large variety of aircrafts requiring a better beacon autonomy and flexibility,
• many different user profiles and stakeholders requiring a common communication solution,
• stronger cost constraints.
Future efforts will now be oriented towards such user sector, with new activities starting in the coming months (in particular with the GRIMASSE project) to make sure that the MEOSAR system ADT solution can answer to General Aviation needs and improve air navigation safety and security to help saving more lives.
Acknowledgment
The GRICAS project has received funding from the European GNSS Agency under the European Union’s Horizon 2020 research and innovation program under grant agreement No 687556.
Additional Resources:
1. cospas-sarsat.int, “Specification for Second-Generation Cospas-Sarsat 406-MHz Distress Beacons”, C/S T.018, which can be found on COSPAS-SARSAT website https://www.cospas-sarsat.int
Authors
Pauline Martin, technical manager of the H2020 GRICAS project, and Operational Concept Engineer in Data Collection in charge of navigation-based innovative services within the Navigation Domain of Thales Alenia Space. She is in charge of developing the new operational concepts for MEOSAR applications. She is also in charge of Thales Alenia Space attendance to COSPAS-SARSAT.
Thibaud Calmettes is technical manager for Data Collection and Scientific Application Programs Service within the Navigation Business segment of Thales Alenia Space France. After being the technical responsible for the on-board processing equipment during ARGOS 4 development, he is now in charge of various data collection systems, such as Satellite-AIS and VDES, and of developments around MEOSAR, including new generation beacons, signals, and MEOLUT processing. As manager for the scientific domain, he also works on the innovative use of GNSS receivers on-board satellites.
Yoan Gregoire is radionavigation and radiolocation engineer in the navigation/location signals and equipment department in CNES, the French Space Agency. His COSPAS-SARSAT activities cover second-generation beacons specifications development and performance evaluation. He is in charge of the development of a MEOSAR open reference chain developed by CNES and used for signal characterization and performance evaluation.
Mercedes Reche obtained her MSc in Telecommunication Engineering from the Universitat Politecnica de Catalunya in 2002. She started to work on Satellite Navigation in 2003 with the Centre Nationale d’Etudes Spatiales (CNES) in France. In October 2004 she joined PILDO LABS as aerospace engineer, giving technical support in activities related to GNSS Operational Validation (mainly EGNOS and GBAS) and acting as project manager of several international projects for Eurocontrol, the European Commission and the European GNSS Agency. Nowadays she is one of the managers of the company, in charge of the GNSS Monitoring department, and provides support to the business development activities.
Christophe Chatain is in charge of developing and promoting MEOSAR ELT (DT) product line at ECA Group (ELTA Subsidiary). He received his Engineer diploma from Polytech Lille in 1986. He is now involved in several research projects to define future features of COSPAS-SARSAT beacons for ECA Group.
Michel Monnerat, manager of the advanced projects within the Navigation Business segment of Thales Alenia Space France. After working on many radar programs within Alcatel Space, and being in charge of the onboard processing of the ARGOS/SARSAT payloads, he has been involved in the Galileo program since 1998, particularly for the signal design and performance aspects. He is now in charge of the advanced projects department dealing with the developments of Galileo and EGNOS ground stations, Satellite-Based data collect systems, GNSS regulation including standardisation and Spectrum management, as well as Engineering for innovative Location Solutions for land applications. The department is also in charge of Search and Rescue developments.




