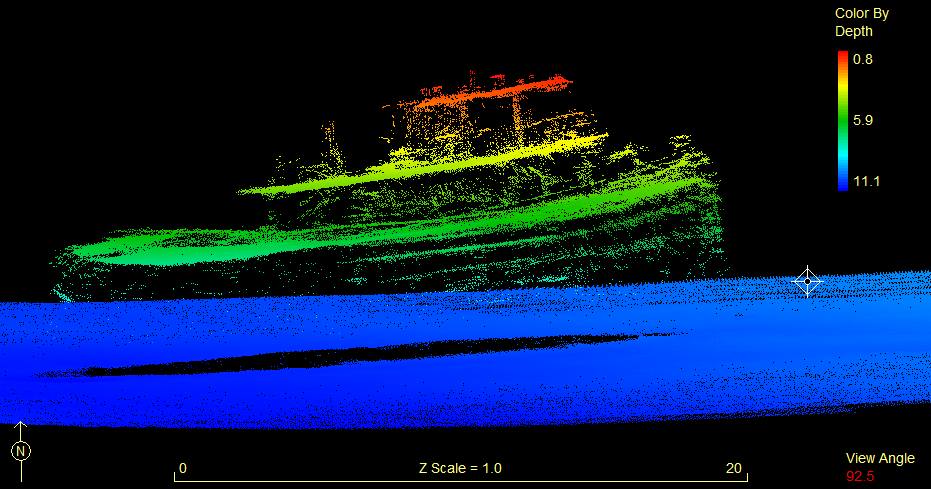
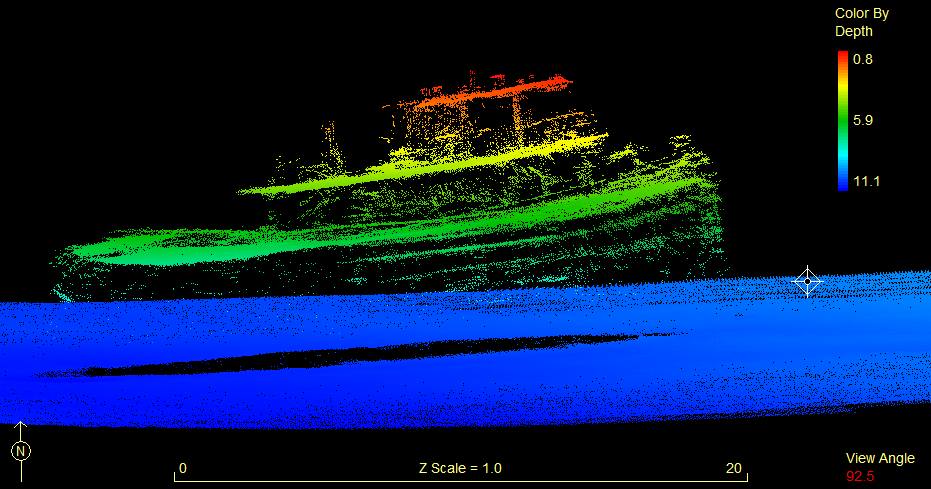
 Sidescan image of Norbit Seahorse
Sidescan image of Norbit SeahorseSensonor has announced new features for its STIM300, a small, lightweight micro-electro-mechanical system (MEMS) inertial measurement unit (IMU) that provides non-GPS–aided positioning in multiple domains.
The STIM300 — which can be used underwater, on land and sea, and in aeronautic and astronautic applications — now has real-time g-compensation in al axes and supports rates of up to 2000 degrees/second.
Sensonor has announced new features for its STIM300, a small, lightweight micro-electro-mechanical system (MEMS) inertial measurement unit (IMU) that provides non-GPS–aided positioning in multiple domains.
The STIM300 — which can be used underwater, on land and sea, and in aeronautic and astronautic applications — now has real-time g-compensation in al axes and supports rates of up to 2000 degrees/second.
According to the company, the MEMS IMU is free of ITAR export restrictions and can be provide performance for applications that previously only had fiber-optic gyros as an alternative.
The STIM300 also is part of the NovAtel Synchronized Position Attitude Navigation (SPAN) GNSS/inertial navigation solution that has been incorporated into the Subsea Norbit US Ltd. iWBMS multibeam sonar system used for bathymetric mapping projects. The use of these systems in mapping projects is highlighted in a feature article in the 2014 edition of Velocity magazine.
A key collaborator for both Norbit and NovAtel has been Seahorse Geomatics, a leading hydrographic support company based in Portland, Oregon, and headed by Mike Mutschler.
Multibeam sonar systems are most often mounted on floating or submerged survey vessels that are heading, pitching, rolling, heaving in different directions, with varying dynamics at play on or under water surfaces. The Norbit multibeam sonar measures several hundred beams, each having a unique two-way travel time and across-track pointing angle from nadir, which must be combined with accurate survey platform positioning, attitude—roll, pitch and heading— and sound speed to derive a final and repeatable XYZ location on a common projection.
“When the different sensors are separated, vertical and horizontal uncertainties are increased due to offset measurement errors, sensor misalignments and platform flexing,” Mutschler explains. To solve this, Norbit puts the NovAtel GNSS+INS deep within the sonar hardware.




