
A look at the KASS architecture and the performance results achieved during the site qualification phase with the KASS operational configuration fully deployed.
CAROLLE HOULLIER, CÉLINE BENASSY FOCH, GUILLAUME COMELLI THALES ALENIA SPACE, FRANCE; BYUNGSEOK LEE, MINHYUK SON, DAEHEE WON KOREA AEROSPACE RESEARCH INSTITUTE, REPUBLIC OF KOREA; CHEON SIG SIN ELECTRONICS AND TELECOMMUNICATION RESEARCH INSTITUTE, REPUBLIC OF KOREA
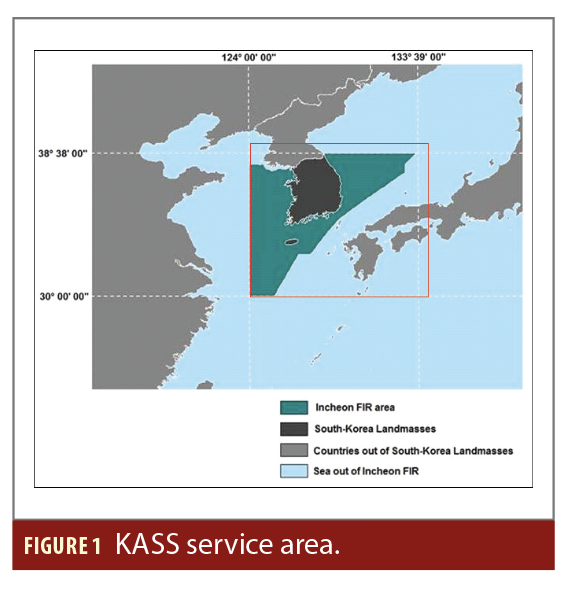
The Korea Augmentation Satellite System (KASS) is the satellite-based augmentation system (SBAS) of the Republic of Korea, currently developed by the Korea Aerospace Research Institute (KARI). Its mission is to provide SBAS services compliant with the International Civil Aviation Organization (ICAO) SARPS Annex 10 [1] over the South Korea area with service level up to APV I.
KASS will offer safety-critical services for civil aviation as well as an open service, usable by other forms of transportation and possibly other position, navigation and timing (PNT) applications. To provide improved GNSS navigation services for suitably equipped users in the agreed service areas, KASS will broadcast an augmentation signal of the U.S. Global Positioning System (GPS) Standard Positioning Service (SPS). The augmentation signal will provide corrections of GPS satellites, orbits and clocks and integrity bounds of orbit/clock residual errors, as well as corrections and integrity bounds for ionosphere delays. The augmentation signal will be broadcast by two Geostationary Earth Orbiting (GEO) satellites and leveraged by GPS/SBAS user equipment to compute a navigation solution.
Thales Alenia Space is the industry prime contractor of this development.
A Closer Look at KASS
The KASS system implements the following segments obtained from different manufacturers or service providers:
• A ground segment including a network of KASS Reference Stations (KRSs), redundant KASS Processing Stations (KPSs), KASS Control Stations (KCSs), KASS Uplink Stations (KUSs) and an external data interface.
• A network segment ensuring the communication network between all subsystems distributed across Korea (WAN) and the WAN Network Monitoring (WNM).
• A space segment including the GEOs and the navigation payloads on-board the GEOs.
The KASS system deployment started at the end of 2020 and was completed at the end of 2022 with the integration of the ground segment with the GEO satellite (MEASAT-3D). The KASS navigation signal has been broadcast since December 2022 with open service configuration (Message Type 0/2 broadcast). The final system qualification was in December 2023, allowing for the start of safety life services.
This article presents the overall KASS architecture and the performance results achieved during the site qualification phase with KASS operational configuration fully deployed.
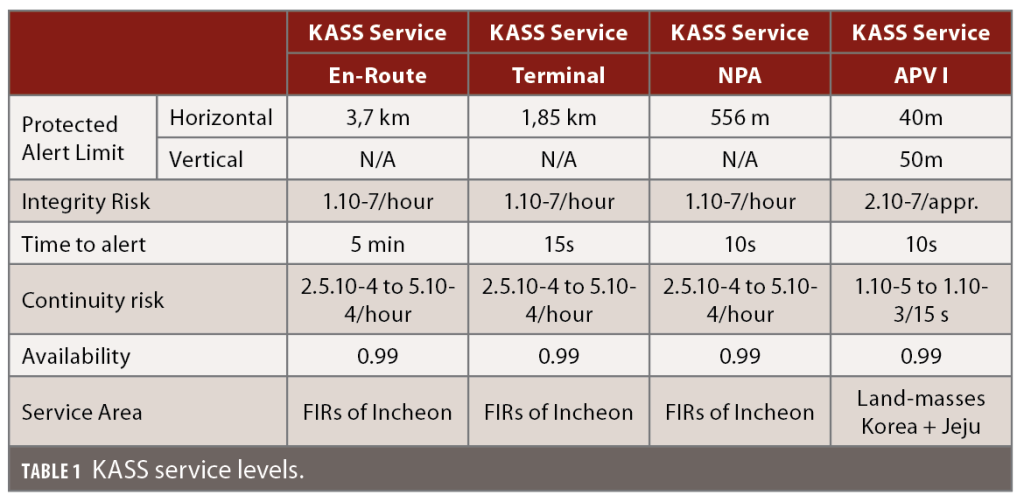
The KASS system is designed to ensure four safety-critical service levels:
• En-Route over Incheon FIR area, flight segments after arrival at initial cruise altitude until the start of descent to the destination
• Terminal over Incheon FIR area for descent from cruise to Initial Approach Fix
• NPA over Incheon FIR area, for non-precision approaches (NPA) in aviation, an instrument approach and landing that uses lateral guidance but not vertical guidance
• APV I over South Korea land masses (including Jeju Island) for precision approaches with vertical guidance.
KASS will provide open service over the Incheon FIR area. Figure 1 shows the KASS service areas.
KASS is designed to be a system-of-systems ensuring these main functions:
• Collect GPS data at various locations in the Republic of Korea (and possibly in other states in the future).
• Compute corrections and associated integrity bounds from ranging measurements of GPS satellites in view of KASS.
• Format messages compliant with the SBAS user interface standardized in ICAO SARPS Annex 10 [1] and the RTCA MOPS 229-D Change 1 [2].
• Uplink a signal carrying these messages to navigation payloads on the KASS GEOs.
Broadcast the signal to the users after frequency-conversion to the L1 band.
Additional support functions are implemented:
• Wide area network between the KASS sites
• Monitoring and control of the KASS elements
• Support to KASS operations
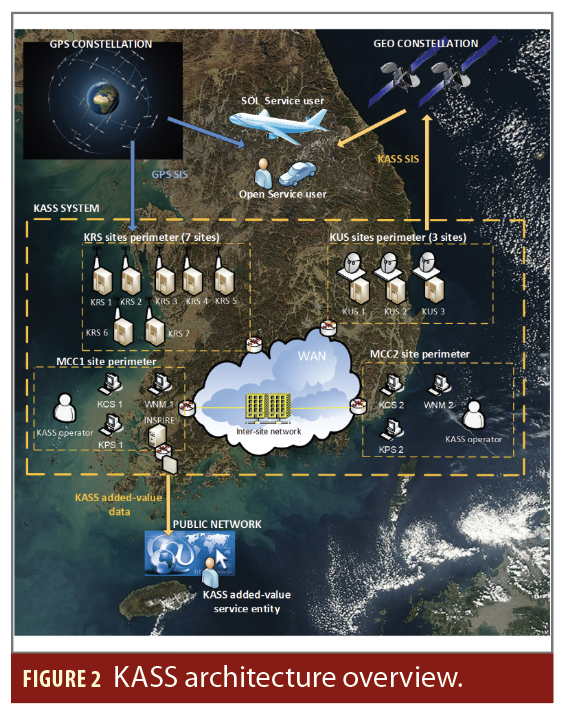
Main elements of the KASS architecture are:
• 14 KRS (reference stations) channels on the seven KRS sites.
• Two KPS (processing units) and two KCS (monitoring and control units) deployed on the two main control center sites.
• Three KUS (uplink stations) deployed on three KUS satellite broadcast sites.
• A wide area network ensuring inter-sites data exchanges.
Figure 2 shows the overall KASS architecture.
Key Performance Parameters
In the frame of the analysis, KASS performances are evaluated to verify the main SBAS requirements.
Performance of a satellite navigation system can be expressed through five criteria: accuracy, integrity, continuity, availability and time-to-alert (TTA).
The accuracy feature is the difference between the computed value and the actual value of the user position.
The integrity risk is the probability during the period of operation that an error, whatever the source, might result in a computed position error exceeding a maximum allowed value, called alert limit, and the user not be informed within the specific TTA.
The alert limits are the maximum allowable error in the user position solution before an alarm is to be raised within the specific TTA. This alert limit is dependent on the flight phase, and each user is responsible for determining its own integrity in regard of this limit for a given operation phase following the information provided by the SBAS SIS.
The system TTA is defined as the time starting when an alarm condition occurs to the time the alarm is displayed in the cockpit. Time to detect the alarm condition is included as a component of integrity.
The continuity feature defines a system’s ability to perform its function without interruption during the operation planned by the user (for example landing phase of an aircraft). It is evaluated as the probability that from the moment the criteria of precision and integrity are completed at the beginning of an operation, they remain so for the duration of the operation.
Finally, the availability feature is the percentage of time when, over a certain geographical area, the criteria of accuracy, integrity and continuity are met.
Performance requirements include:
• The system performance in Fault Free conditions.
• The system performance in front of Feared Events (GPS FE, KRS FE, Hardware FE).
Additional system performance assessed at system qualification is the KASS system time synchronization with GPS system time that shall be maintained in the range of 50 ns.
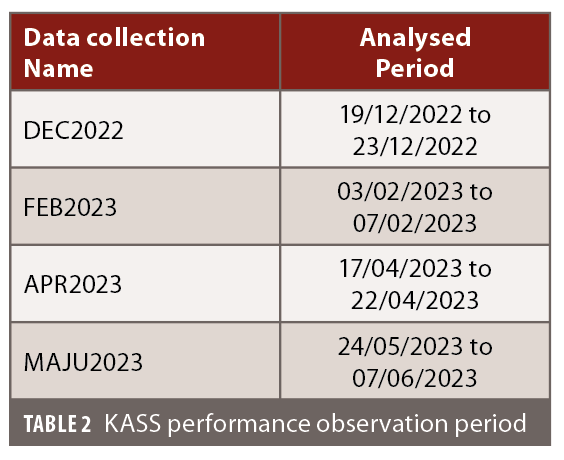
Overall Performance Qualification Campaign Results
The performance qualification phase was run from December 2022 to June 2023. Four different periods have been deeply analyzed.
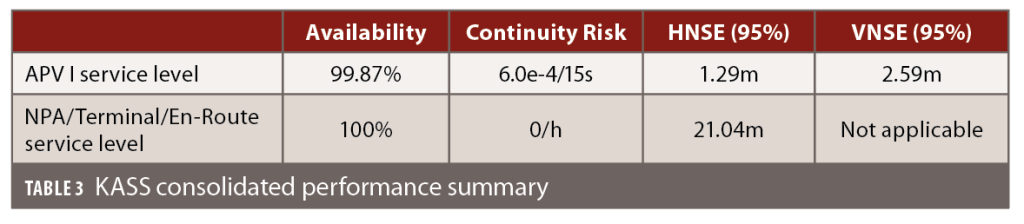
The consolidated performance results (average values over all observation periods) are listed in Table 3.
Moreover, no integrity issue has been raised during the overall qualification test campaign.
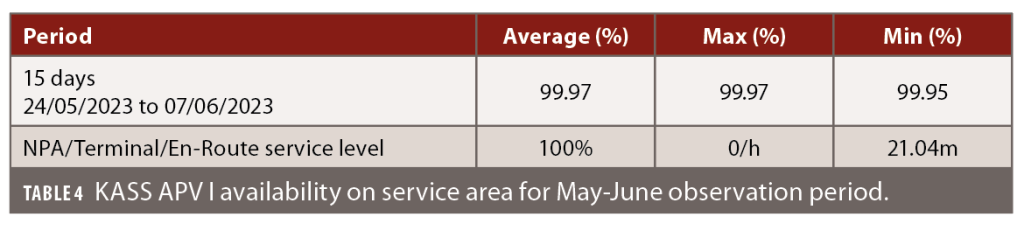
Focus on Global Performance for May to June Final Test Phase
The final performance results presented are computed over 15 days from May 24, 2023, to June 6, 2023.
Integrity From Satellite Corrections
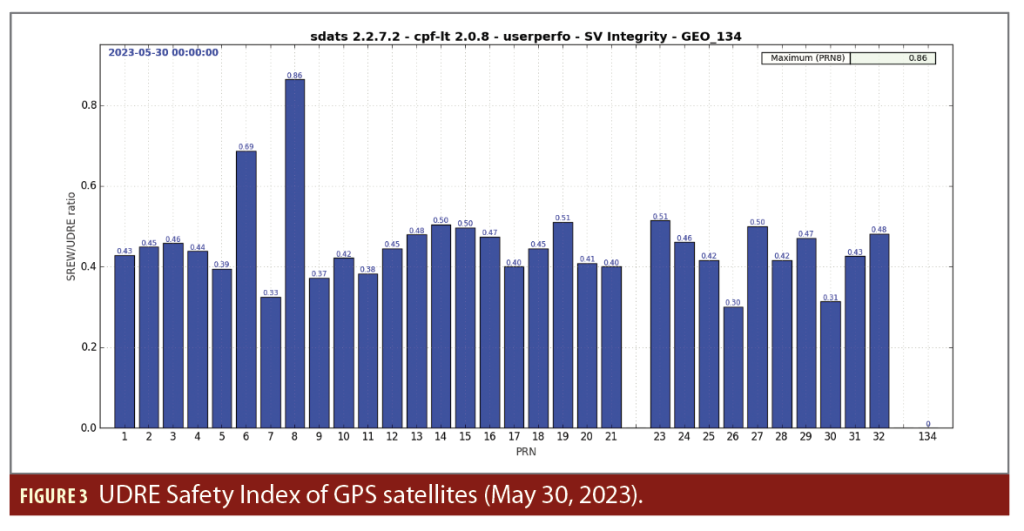
To display the integrity of the satellite corrections for each GPS satellite, the notion of UDRE Safety Index is used to assess the integrity margin. The UDRE Safety Index is defined as the ratio

The satellite residual error for the worst user location (SREW) is computed as the pseudorange error projection due to the remaining satellite ephemeris and clock errors after KASS corrections have been applied for the worst user location of the relevant service area. The relevant service area corresponds to the intersection of the service area and of the monitored satellite footprint. The “true” SREW has been computed with the help of the precise GPS ephemerides provided by the International GNSS Service in sp3 format.
The user differential range error (UDRE) is defined in the section A.4 of MOPS [2] and provided by the KPS subsystem. For a given satellite, user integrity is ensured as long as the UDRE SFI remains lower than 5.33.
Figure 3 shows the UDRE Safety Index computation for May 30, 2023.
The satellite SFI remains under the value of 1 for all GPS satellites on this day, which demonstrates the large integrity margin of the UDRE corrections broadcast by KASS.
Integrity of Ionosphere Corrections
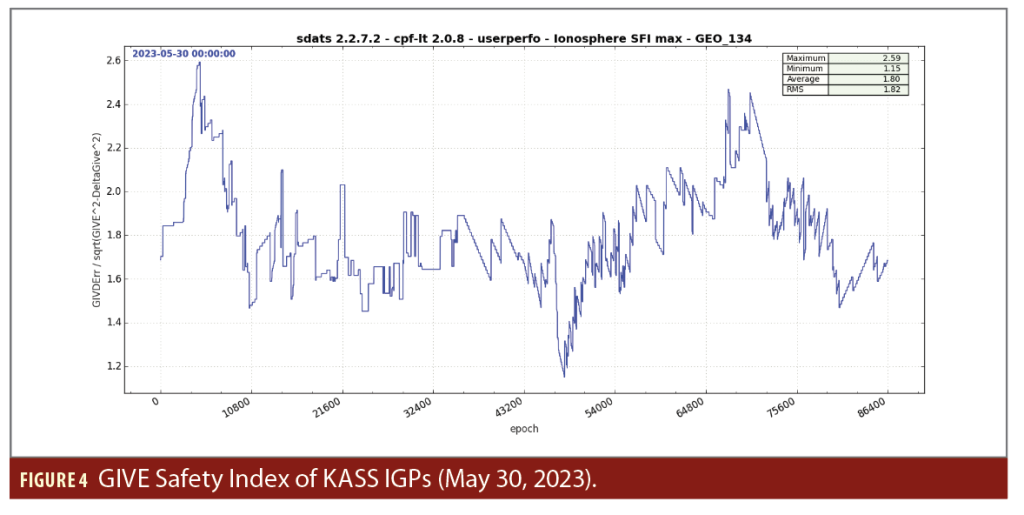
To display the integrity of the ionosphere corrections for each IGP, the notion of GIVE Safety Index is used. The GIVE Safety Index is defined as the ratio

With ∆GIVE the contribution the 1-sigma value that accounts for the pseudo-range error induced by the effect of the ionospheric divergence on the user smoothing filter defined in [2].
The GIVD Error is defined as the vertical pseudorange error at the considered IGP location, due to the remaining ionospheric delay after applying the GIVD corrections. The “true” GIVD error is computed thanks to precise real ionosphere conditions provided by the International GNSS Service in IONEX format.
Figure 4 shows the GIVE Safety Index computation for the May 30, 2023, period.
The ionosphere SFI remains under the value of 2.6 for all IGPs on this day, which demonstrate the large integrity margin of the ionosphere corrections broadcast by KASS.
Given the integrity assessment of satellites corrections and of ionosphere corrections, the contribution of fault free conditions to the integrity risk is negligible with real data and is similar with the results obtained from synthetic scenarios used prior to the system deployment. Considering that integrity performance verification at pseudorange level covers assessment at user position domain level, the integrity risk (APV I and the other KASS Services) is ensured.
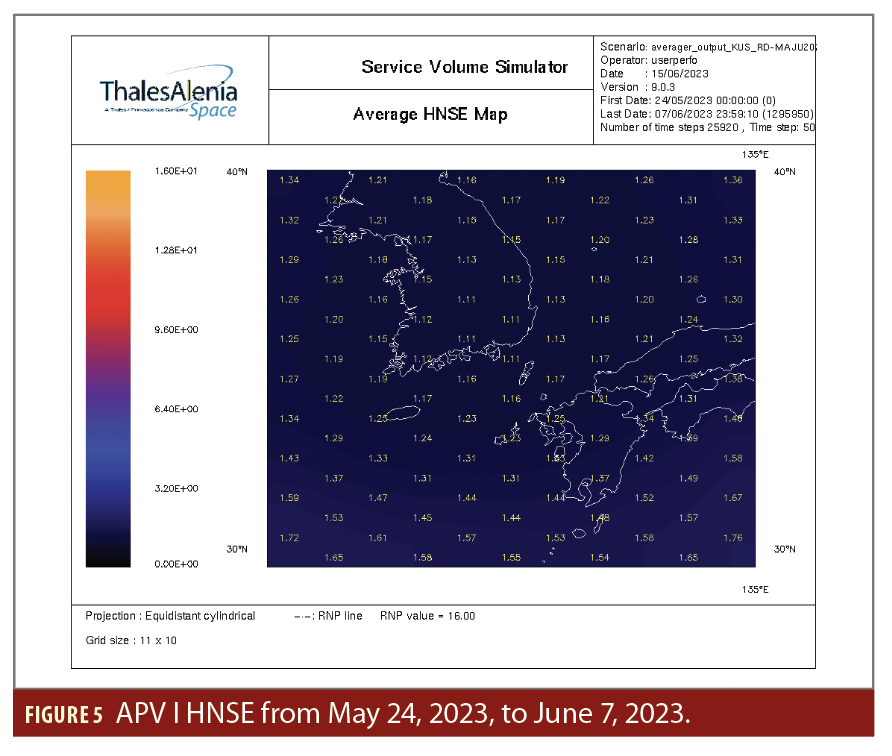
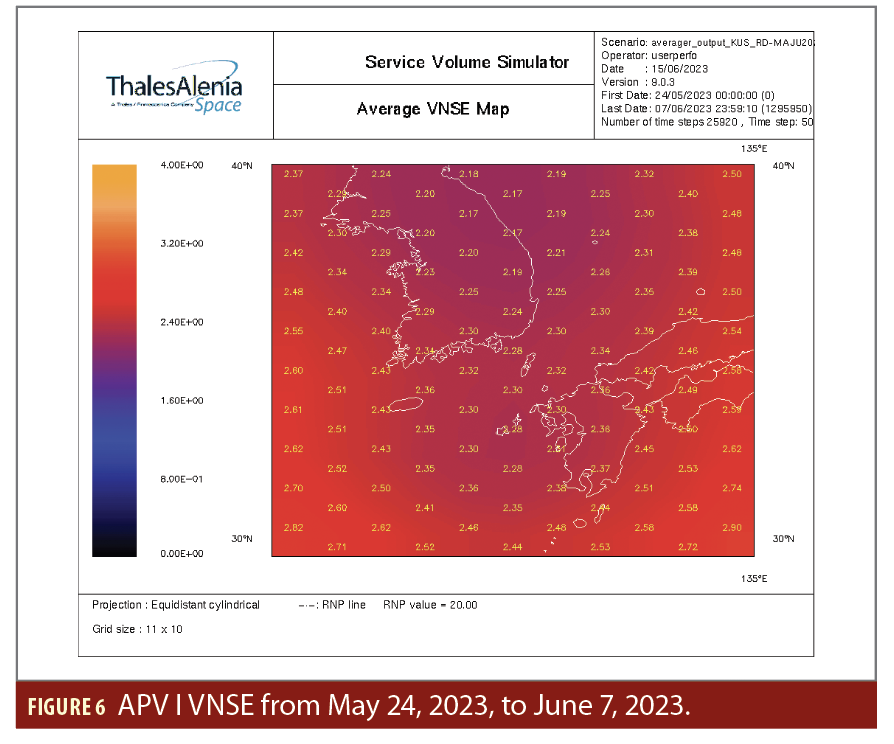
Accuracy at User Level
User location is defined on a grid of longitudes from 124° to 134° East, and of latitudes from 30° to 39° North, with steps of 1°. The presentation is limited to the APV I service level. The performances requirements for the other services are also fulfilled.
The horizontal and vertical navigation service errors (HNSE and VNSE) are presented in meters for each user position. For the APV I Service (at 95 percentile), performance are computed over the whole observation period.
The accuracy performance demonstrates very good behavior of the KPS algorithms, correcting the GPS orbits, clocks and ionosphere with efficiency and high accuracy in vertical as well as in horizontal axis.
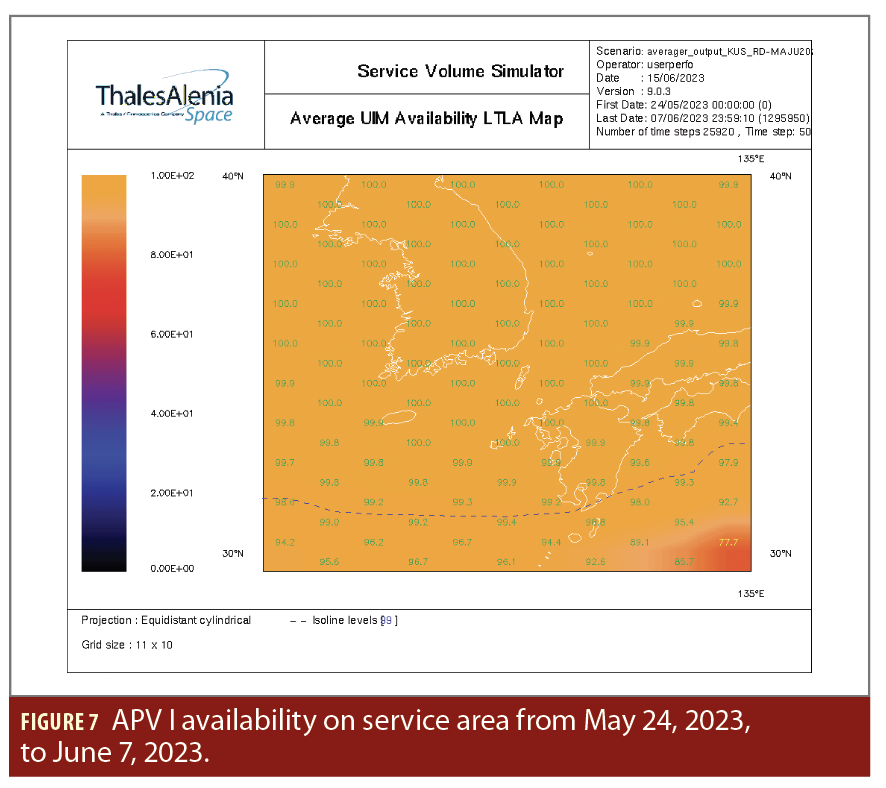
Service Availability
For APV I service, KASS performances are:
APV I service availability is fully ensured over the complete service area. Some availability degradation is limited to the extreme south, outside any KASS service area, and without impact on performance.
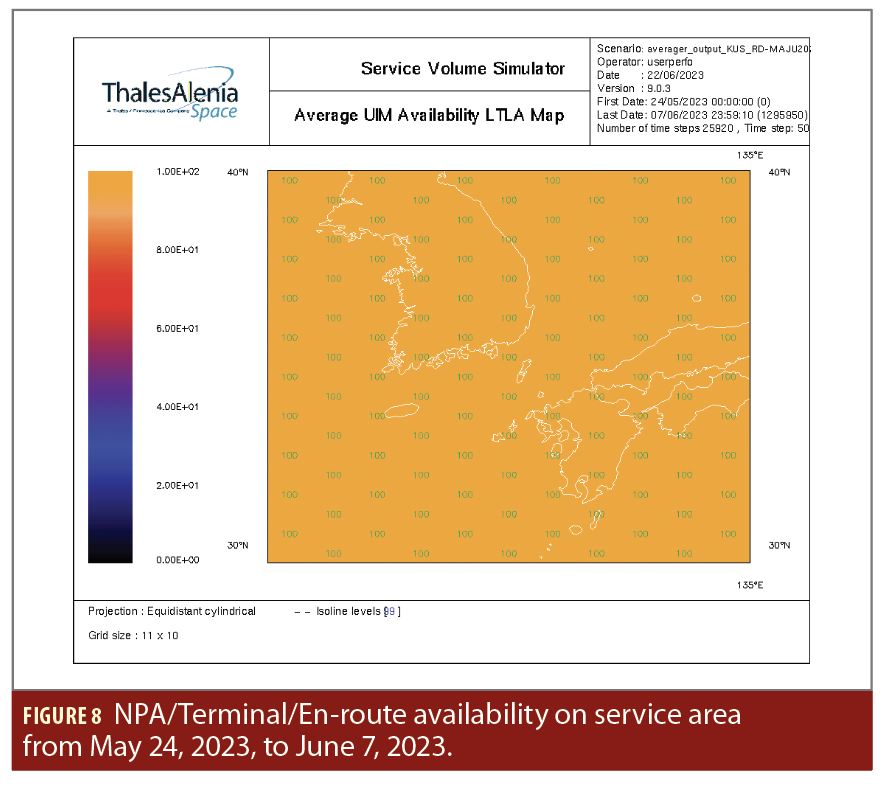
For NPA/Terminal/En-route services, KASS performances are:
The NPA service availability is 100% ensured over the complete service area.
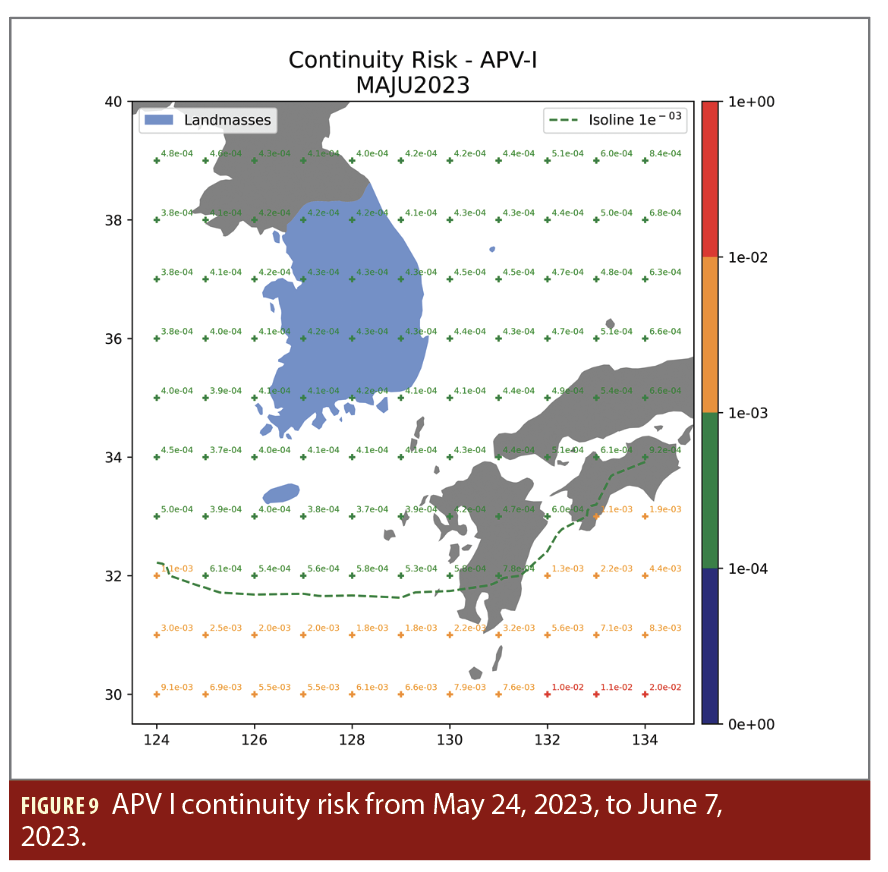
Service Continuity Risk
For APV I service, KASS performances are seen in Figure 9.
APV I service continuity is fully ensured over the South Korea landmasses including Jeju Island.
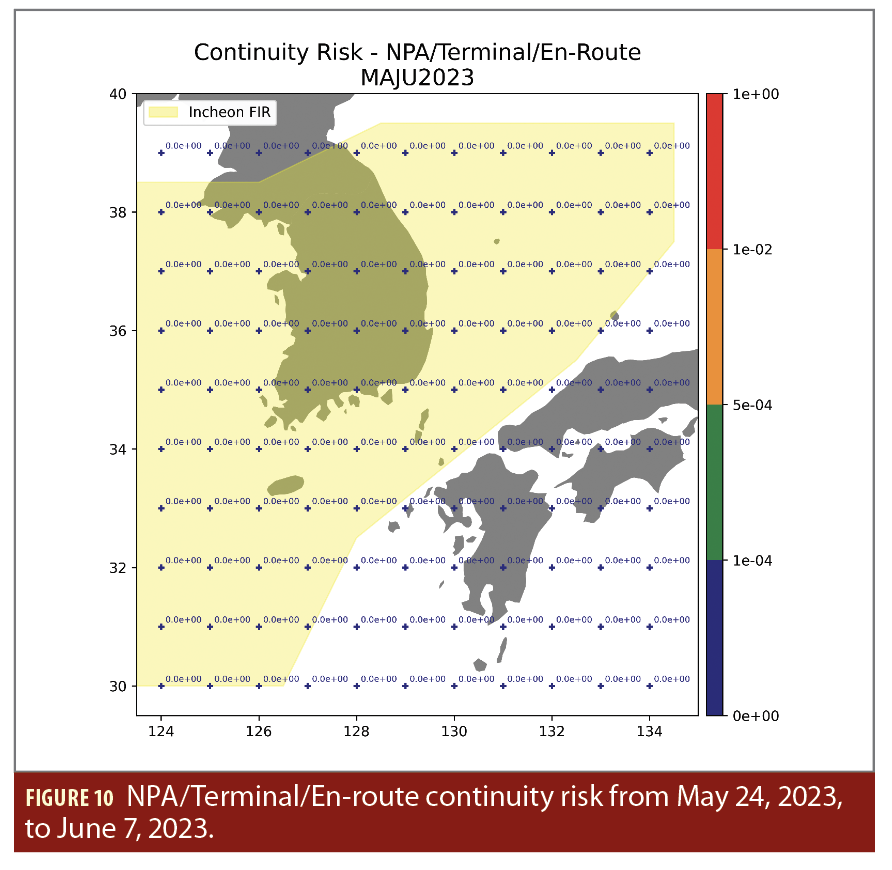
For NPA/Terminal/En-route services, KASS performances are seen in Figure 10.
NPA/Terminal/En-route services continuity is fully ensured over the complete service area corresponding to the Incheon FIR.
KASS Network Time Synchronization Performance
The KASS network time (KNT) synchronization with GPS system time is ensured by the KASS navigation algorithm.
The synchronization performance is computed as per Table 6.
The KASS system time synchronization with GPS system time is maintained in the range of 5 ns compliant with the maximum specified value of 50 ns.


Performance Achievement at Local Reference Point
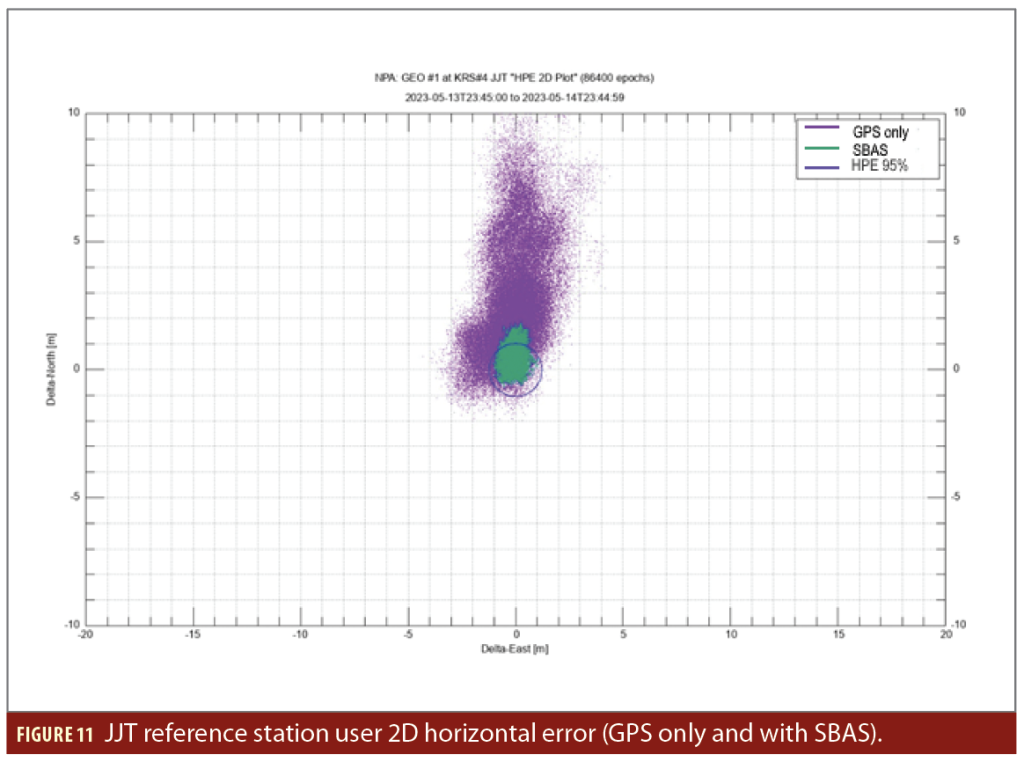
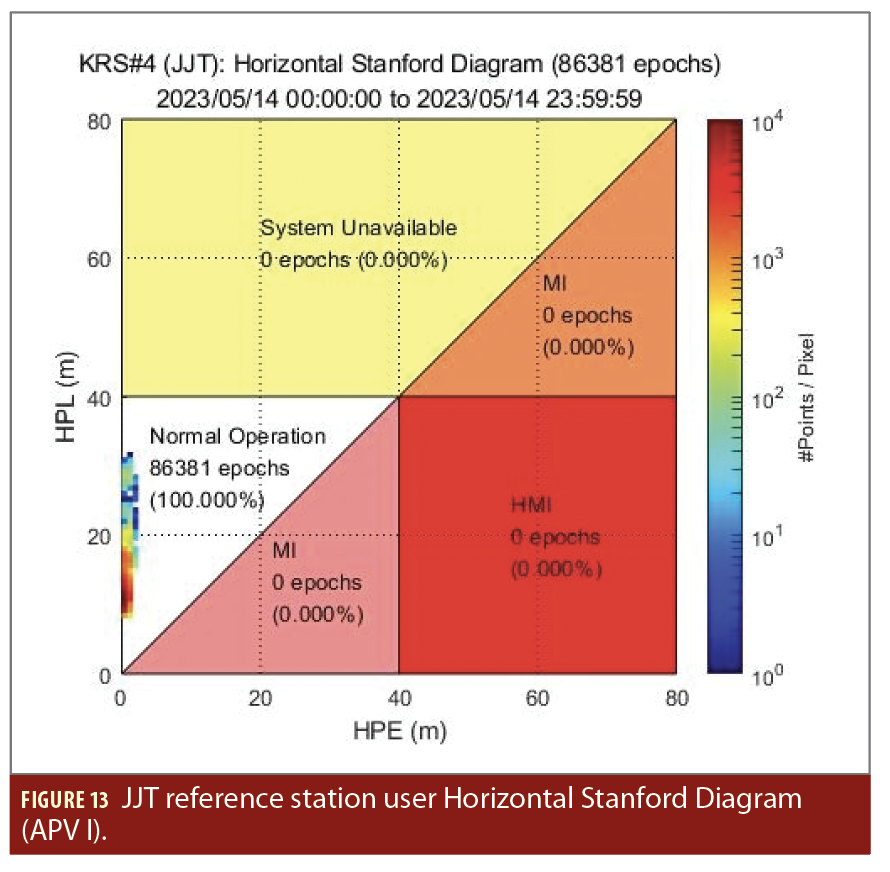
KASS system implements on-line performance monitoring at the main control center level function, making it possible to verify performances achieved in near real-time and to report daily performance consolidation. Figure 11 provides the daily performances reached at the KASS reference station located at the Jeju Tracking Station (JJT) over a full day on May 14, 2023.
Figure 11 shows the user horizontal position error (HPE) achieved with GPS only and with SBAS position computation.
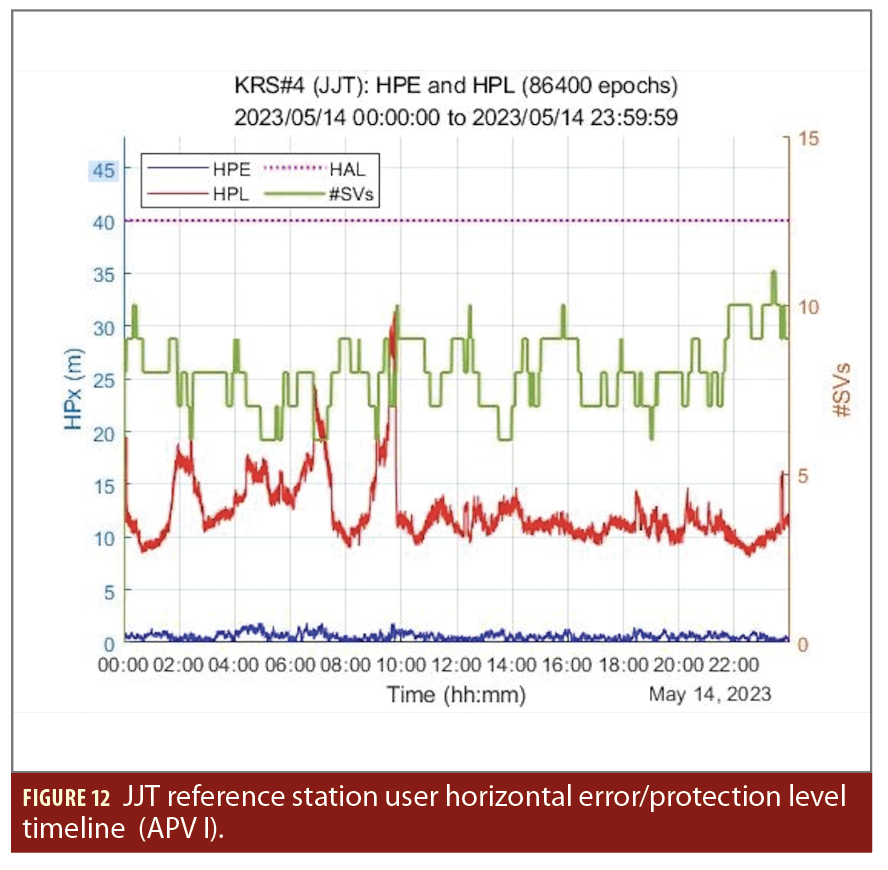
Figure 12 shows the daily evaluation of the HPE and the user horizontal protection level (HPL) achieved with SBAS compared with the horizontal alarm limit (HAL). It also shows the number of GPS satellites monitored by the SBAS.
Figure 13 shows the daily Horizontal Stanford Diagram.
The horizontal performance achieved at the reference station confirms the global KASS performance, in particular the residual error distribution after application of SBAS correction, is in the range of 1.2 m at 95%. The protection limit computation also shows good margin versus the alarm limit at 40 m, ensuring full service availability.
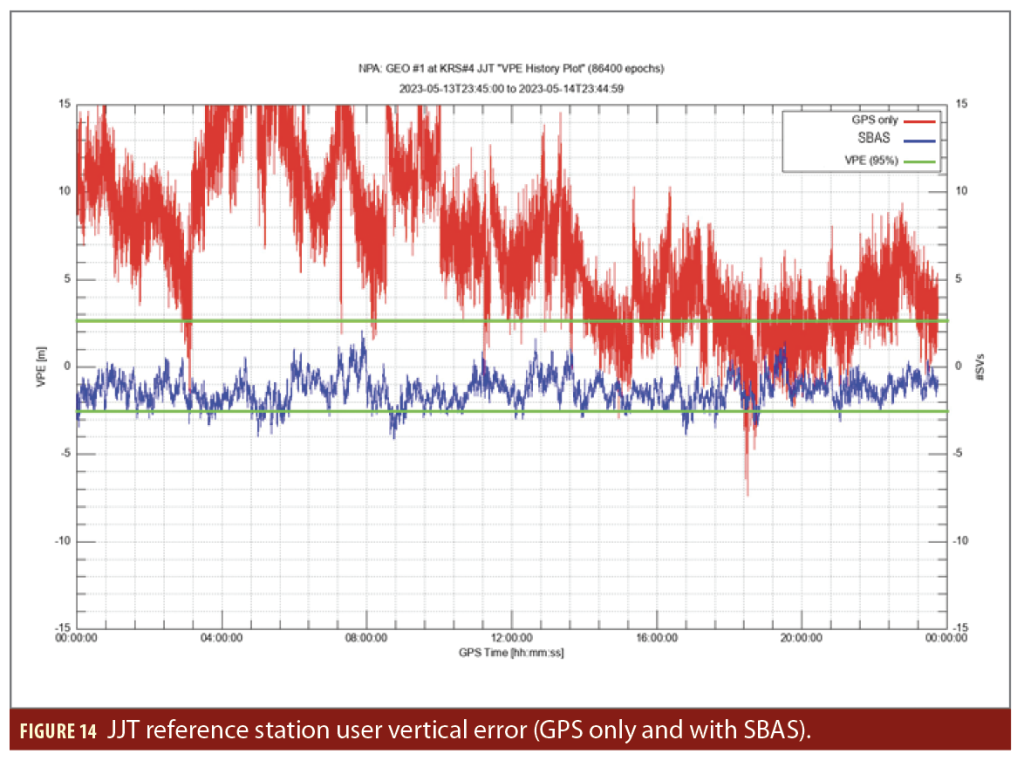
Figure 14 shows the user vertical position error (VPE) achieved with GPS only and with SBAS position computation.
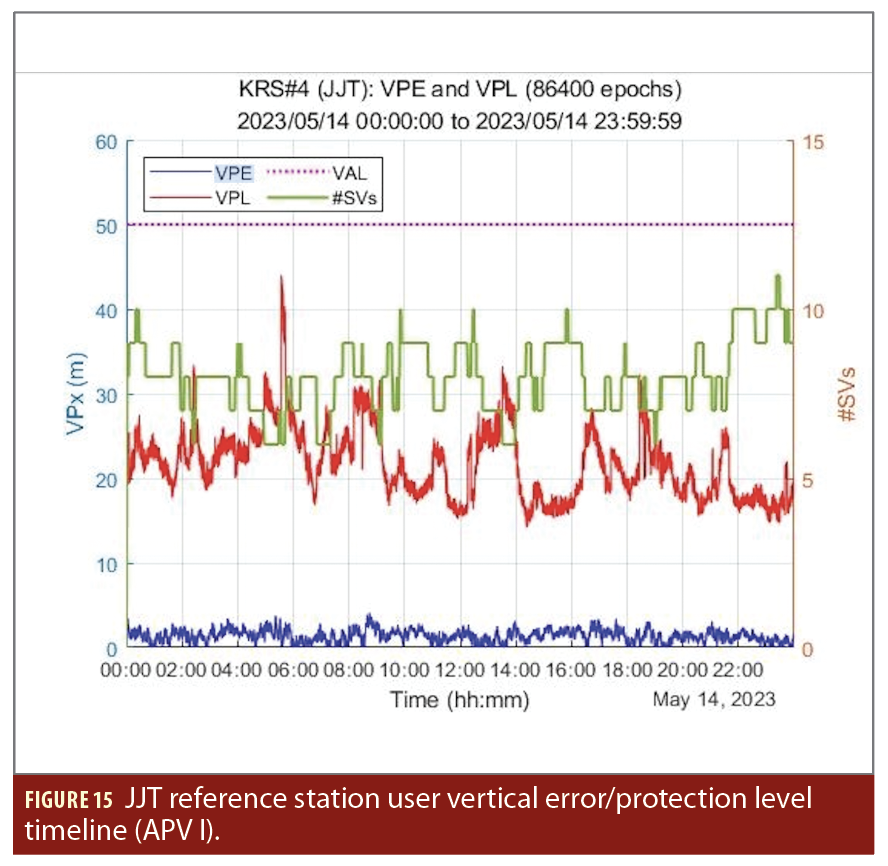
Figure 15 shows the daily evaluation of the user vertical position error (VPE) and the user vertical protection level (VPL) achieved with SBAS compared with the vertical alarm limit (VAL). It also shows the number of GPS satellites the SBAS monitors.
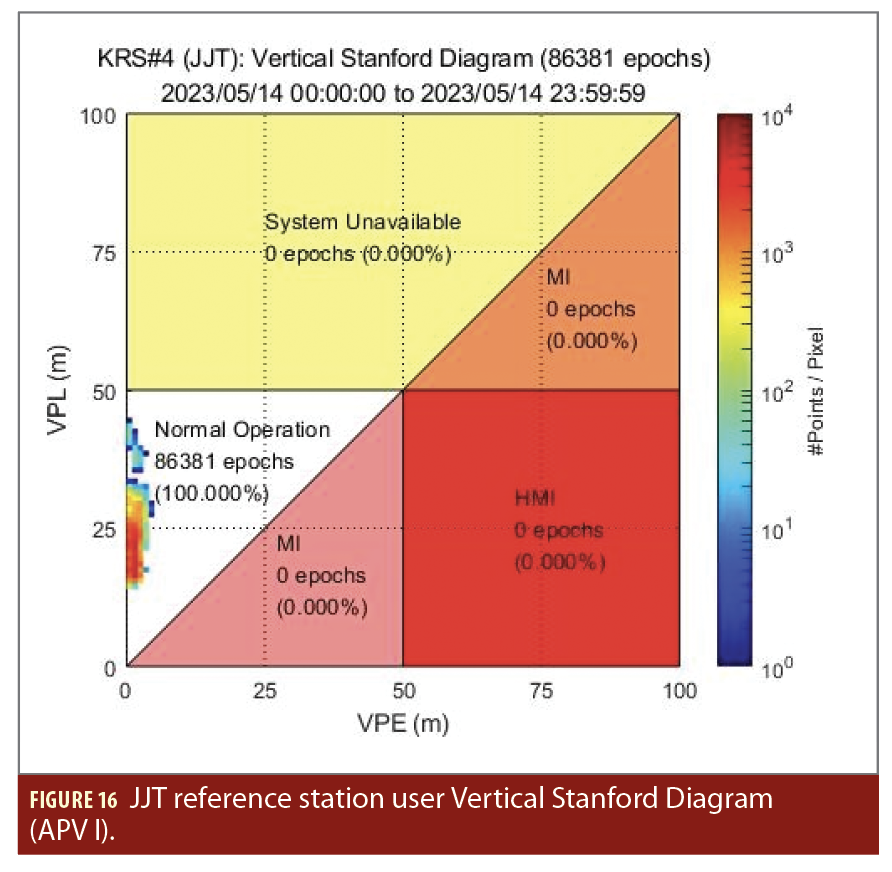
Figure 16 shows the daily Vertical Stanford Diagram.
The vertical performance achieved at the reference station also reflects global KASS performance. The residual error distribution after application of SBAS correction is less than 2.6 m. The protection limit computation also shows good margin versus the alarm limit at 50 m, ensuring full service availability.
Conclusions
The performance test results achieved show very good levels of accuracy, continuity, integrity and availability.
The KASS signal is currently broadcasting a safety of life service. The next program steps will be to declare safety of life services availability and integration of the second GEO satellite currently under development.
Acknowledgements
The authors would like to thank everyone who contributed to this paper and highlight this work has been performed thanks to close cooperation between the Korea Aerospace Research Institute (KARI) and Thales Alenia Space. The authors thank the major partners involved for the KASS navigation algorithms design and development.
This article was supported by a grant (21ATRP-A087579-08) from Aviation Safety Technology Research Program funded by Ministry of Land, Infrastructure and Transport of Korean government.
References
(1) “Standards and Recommended Practices (SARPS) Annex 10 to the Convention on International Civil Aviation”, Volume I, up to Amendment 86, July 2006, ICAO (International Civil Aviation Organization).
(2) “Minimum Operational Performance Standards (MOPS) for Global Positioning System/Wide Area Augmentation System Airborne Equipment”, RTCA/DO-229D with Change 1, February 1, 2013.
Authors
Carolle Houllier graduated with a M.S. degree from the Aeronautical and Space Engineering School, ISAE Toulouse (France), in 1997. She has been an expert engineer in algorithms for GNSS for Thales Alenia Space since 2013 and worked on various space programs for the French Space Agency CNES before that. She has been the performance manager for the KASS program since 2020.
Céline Benassy Foch is a project manager and a system engineer at Thales Alenia Space. She received an M.S. degree in Network and Telecommunication from the INSA, Toulouse (France) in 1999. She has been the project manager for the KASS program since 2019.
Guillaume Comelli is a system engineer and system architect at Thales Alenia Space. He received his M.S. degree in Electrical Engineering from the INSA, Lyon (France) in 1994. He has been the technical manager for the KASS program since 2019.
ByungSeok Lee received the B.S. degree in Electric and Electrical Engineering, a M.S. degree and a doctor’s degree in Electrical and Computer Engineering from the University of Seoul, Seoul, Korea, in 2002, 2009, 2015, respectively. He has conducted research related to GNSS including the Satellite Based Augmentation System (SBAS) in Korea Aerospace Research Institute. He has been in charge of the Korean-SBAS (KASS, Korea Augmentation Satellite System) program from November 2020 to the present.
Minhyuk Son received his B.S., M.S. degrees in Electrical Engineering from Daegu University, South Korea, in 2009, and 2011, respectively. He joined Korea Aerospace Research Institute in 2011 and is currently involved in the Korea Augmentation Satellite System (KASS) program. He is in charge of operation safety technology development for KASS.
Daehee Won is a senior researcher at Korea Aerospace Research Institute (KARI) and has been working on developing the KASS Control Station since 2016. He received his Ph.D. degree in Aerospace Engineering from Konkuk University (Rep. of Korea) for research on navigation sensor integration and its performance analysis. He was a postdoctoral researcher at the University of Colorado at Boulder for the development of navigation algorithms for low Earth orbit (LEO) satellites. His research interests include GNSS augmentation and multi sensor integration.
Cheon Sig SIN received the B.S. degree in Electric and Electrical Engineering from Hanyang University, M.S. degree from Chungnam University, Korea in 1990, 2000 respectively. He has conducted research related to a GNSS Signal Interference Detection and Mitigation Technology and Global Navigation Satellite System (GNSS) including the Satellite Based Augmentation System (SBAS) in Electronics and Telecommunication Research Institute. He has been in charge of the GK-3 SBAS Payload Development program from April 2021 to present.


