
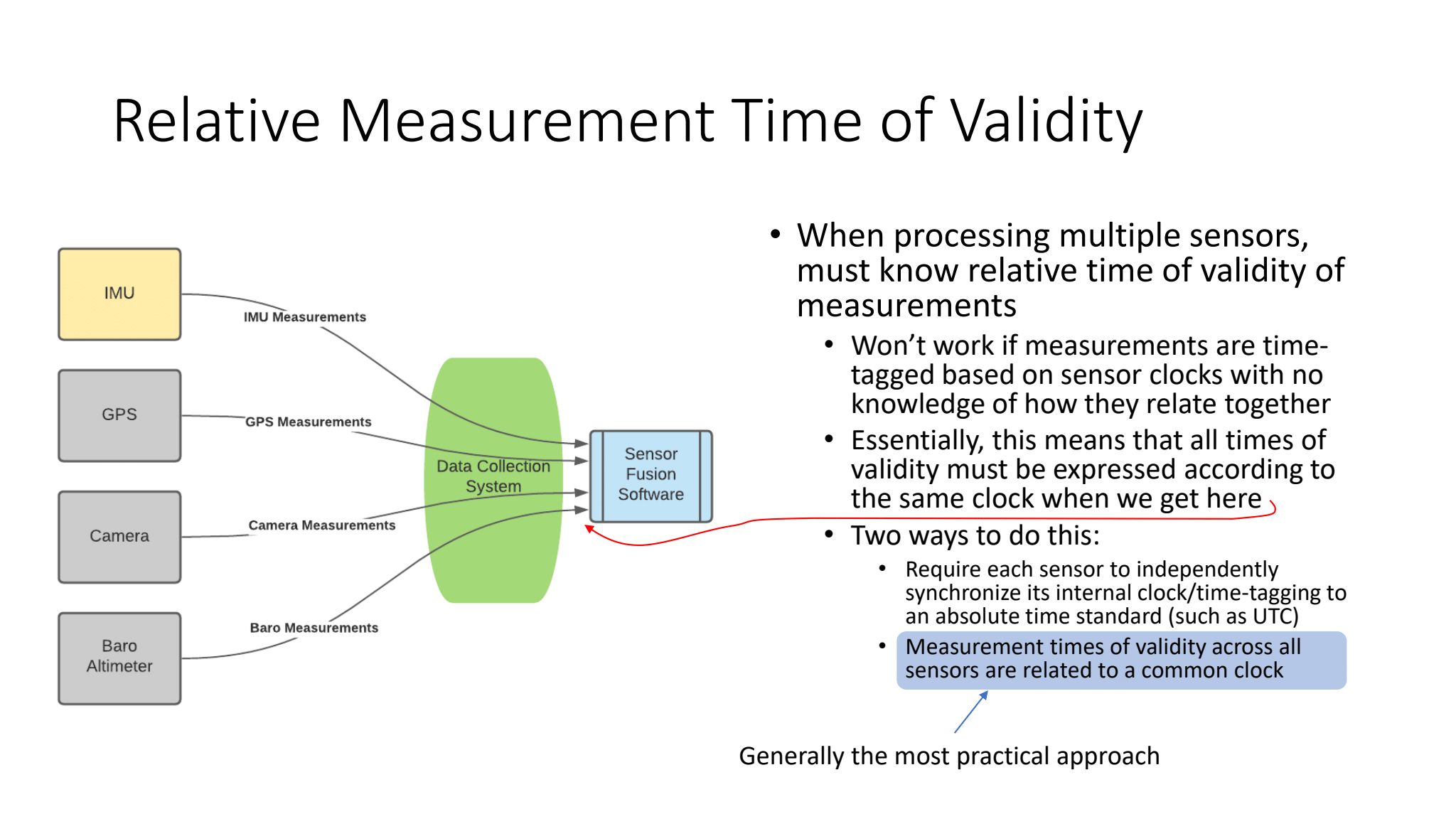
GPS + inertial + camera + LiDAR + baro-altimeter = a very precise measurement, right? Not when the respective sensor output timings lack proper synchronization. Only when each piece of data carries an accurate timetag can they together enable optimal performance in multi-sensor fusion systems.
A free webinar on August 31 explains how an inertial measurement unit (IMU) assembles and delivers precise timing information, typically at a much higher rate than the co-integrated GNSS receiver.
[Photo above: OWLS from Latronix AB will be discussed, dissected and analyzed during the webinar. For contact-free measurement of track, rails and overhead lines, OWLS delivers high-resolution data at speeds up to 300 km/h. This enables the installation of the equipment on vehicles in regular traffic. The OWLS device integrates speed sensors, tachometer, GPS, lasers, optical sensors and inertial measurement components. Timing is everything!]
Attendees will learn how correct synchronization of this data across the system is critical to performance in the application, particularly in high-dynamic conditions, challenging environments and autonomy.
Register here for the free August 31 webinar, “The Right Time for the Right Place.”
An acknowledged expert in the field, with more than 30 years of cutting-edge experience in multi-sensor R&D, opens the discussion with an examination of the internal workings of the IMU and how the user can access timing information within it for ultimate advantage. A specialist in IMU design and fabrication then explores the advantages furnished by the latest micro-electromechanical systems (MEMS) technology and how the customer can best utilize options furnished within the IMU.
Finally, an engineer focused on industrial inspections examines the IMUs role in successful application, discussing the critical aspect of synchronization of the different sensors within an IMU – GNSS integration. Challenges and solutions related to timing and design integration of multiple sensor inputs for pre- and post-analysis will be covered.
What you’ll gain from this webinar:
• An understanding of IMU architecture
• Knowledge of the timing construction process inside the IMU and how it is synchronized across the system
• Inside access to this critical timing data
• Special considerations with respect to timing in the IMU
• Instruction on use of various options within the IMU
• An appreciation of timing error impact on application performance
Our expert panelists:
 John Raquet, Director at Integrated Solutions for Systems (IS4S)-Dayton, where develops efficient, pluggable approaches to all-source navigation. He founded and was formerly the Director of the Autonomy and Navigation Technology (ANT) Center at the Air Force Institute of Technology (AFIT). He has a multidisciplinary background-teaching in electrical engineering with a PhD in geomatics engineering from the University of Calgary, a masters in aero/astro engineering from the Massachusetts Institute of Technology, and a BS in astronautical engineering from the US Air Force Academy. He is a past President of the Institute of Navigation (ION), has been a US Fulbright Scholar, and is an ION Fellow. He has been developing navigation system technology for more than 30 years.
John Raquet, Director at Integrated Solutions for Systems (IS4S)-Dayton, where develops efficient, pluggable approaches to all-source navigation. He founded and was formerly the Director of the Autonomy and Navigation Technology (ANT) Center at the Air Force Institute of Technology (AFIT). He has a multidisciplinary background-teaching in electrical engineering with a PhD in geomatics engineering from the University of Calgary, a masters in aero/astro engineering from the Massachusetts Institute of Technology, and a BS in astronautical engineering from the US Air Force Academy. He is a past President of the Institute of Navigation (ION), has been a US Fulbright Scholar, and is an ION Fellow. He has been developing navigation system technology for more than 30 years.
 Reidar Holm is a Product Development Manager at Sensonor, a producer and developer of high-precision, light-weight gyros and IMUs. He works MEMS R&D and design, ASIC design, low-stress package design, system design, assembly and calibration, and high-volume production for automotive, MEMS pressure sensors, accelerometers, gyros and IMUs. He has a degree in electrical engineering and electronics from the University of Manchester Institute for Science and Technology
Reidar Holm is a Product Development Manager at Sensonor, a producer and developer of high-precision, light-weight gyros and IMUs. He works MEMS R&D and design, ASIC design, low-stress package design, system design, assembly and calibration, and high-volume production for automotive, MEMS pressure sensors, accelerometers, gyros and IMUs. He has a degree in electrical engineering and electronics from the University of Manchester Institute for Science and Technology
 Björn Skatt, Chief Technology Officer and R&D Coordinator at Latronix AB, a Swedish railway inspection firm, where he specializes in system design, image processing, geometrical calculations, 3D visualizations and hardware-connected programming for optical and inertial measuring systems for railway applications.
Björn Skatt, Chief Technology Officer and R&D Coordinator at Latronix AB, a Swedish railway inspection firm, where he specializes in system design, image processing, geometrical calculations, 3D visualizations and hardware-connected programming for optical and inertial measuring systems for railway applications.
Register here for the free August 31 webinar, “The Right Time for the Right Place.”




