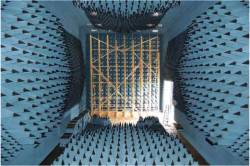
Figures 12 & 13: GPS Interference Testing
Return to main article: "GPS Interference Testing"
By Inside GNSSGlobal Navigation Satellite Systems Engineering, Policy, and Design
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
The gloves have come off now that test results show clearly the probable effects on GPS of LightSquared’s proposed wireless broadband network: widespread, debilitating interference to GPS receivers.
By Dee Ann Divis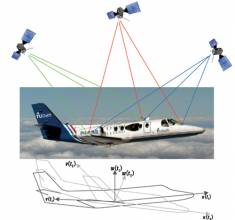
 FIGURE 1: Heading, bank and elevation angles of an actual platform carrying two perpendicular two meter-long baselines. The attitude solutions are shown for both the derived, or float, measurements (top), as well as the carrier phase-based, or fixed, measurements obtained after having correctly resolved the integer ambiguities (bottom). Precision differs between the methods by two orders of magnitude. Gray dots represent the two-dimensional projections on each of the three coordinate planes.
FIGURE 1: Heading, bank and elevation angles of an actual platform carrying two perpendicular two meter-long baselines. The attitude solutions are shown for both the derived, or float, measurements (top), as well as the carrier phase-based, or fixed, measurements obtained after having correctly resolved the integer ambiguities (bottom). Precision differs between the methods by two orders of magnitude. Gray dots represent the two-dimensional projections on each of the three coordinate planes.Working Papers explore the technical and scientific themes that underpin GNSS programs and applications. This regular column is coordinated by Prof. Dr.-Ing. Günter Hein, head of Europe’s Galileo Operations and Evolution.
By Inside GNSS
Q: What is a virtual reference station and how does it work?
A: To reach centimeter-level — or even better — accuracy of positioning typically requires use of precise dual-frequency carrier phase observations. Furthermore, these observations are usually processed using a differential GNSS (DGNSS) algorithm, such as real time kinematic (RTK) or post-processing (PP). Regardless of the specific differential algorithm, however, implicit in the process is an assumption that the quality of the reference station data is consistent with the desired level of positioning accuracy.
By Inside GNSS