Figure 7: GPS Interference Testing
Return to main article: "GPS Interference Testing"
By Inside GNSSGlobal Navigation Satellite Systems Engineering, Policy, and Design
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS
Return to main article: "GPS Interference Testing"
By Inside GNSS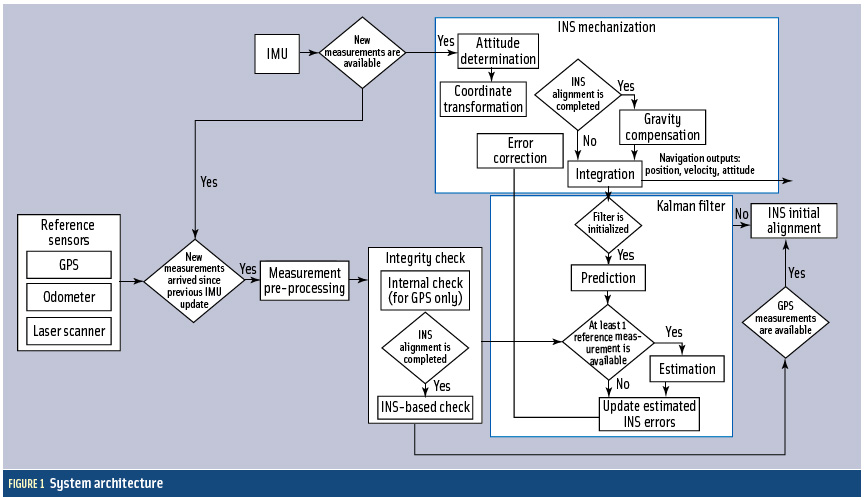 FIGURE 1: System architecture
FIGURE 1: System architectureCooperative vehicle safety applications should preferably have two-meter horizontal accuracy and six-meter vertical accuracy, all with a 95-percent availability. The solution must be developed to incorporate lower-cost sensor options, specifically, lower-cost inertial measurement units that can be generally characterized by the gyro drift of 100 degrees per hour and an accelerometer bias force of twice its mass times gravity (two milligals).
By Inside GNSS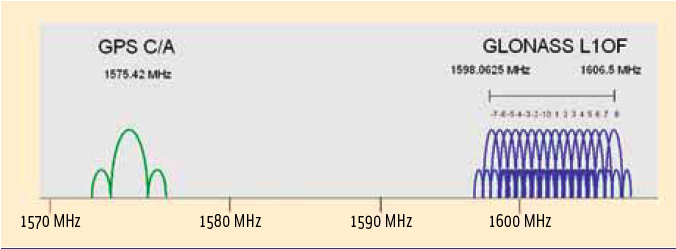 FIGURE 1: GPS/GLONASS L1 frequency band
FIGURE 1: GPS/GLONASS L1 frequency bandAs is well known, Galileo will become the European complement to the U.S. Global Positioning system.
But what about Russia’s GLONASS?
Although this constellation has been in operation for nearly three decades, the limited number of available satellites along with an uncertain governmental commitment to GLONASS performance until recent years had seriously restricted its use for aviation.
By Inside GNSS
A GNSS signal simulator is mainly used to simulate GNSS signals transmitted by navigation satellites, propagated through the Earth’s atmosphere, and received by the receiver antenna. A simulator provides a convenient signal source for the test and validation of receiver function and performance and can also be used in GNSS experiments and studies of signal/data processing algorithms.
By Inside GNSS
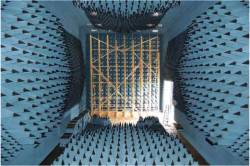
Anechoic chamber test site at U.S. Naval Air Systems Command (NAVAIR) facility in Patuxent River, MarylandInterference can pose a threat to the reception of GNSS signals in a variety of ways. Even low-level signals have the potential to interfere with GNSS receivers, which require very high sensitivity for acceptable performance due to the extremely low received GPS signal power at the Earth’s surface.
By Inside GNSS
Return to main article: "Keeping the Spoofs Out"
By Inside GNSS
Return to main article: "Keeping the Spoofs Out"
By Inside GNSS
Return to main article: "Keeping the Spoofs Out"
By Inside GNSS
Return to main article: "Keeping the Spoofs Out"
By Inside GNSS