
The second of a two-part article explains how an initial system using existing Earth-GNSS constellations may be augmented with dedicated lunar orbiting satellites as well as lunar beacon ranging sources. A gradual deployment leads to a full autonomous lunar navigation system.
A new lunar economy of moon exploration by space agencies, private companies and public-private partnerships has emerged, with initiatives involving robots, habitat and transportation. All the proposed missions share similar navigation and communication needs that could be potentially and efficiently satisfied through a dedicated lunar system.
In Part 1 of this article, we proposed a Lunar PNT implementation roadmap in three phases, starting with the use of the already existing Earth-GNSS constellations via high-sensitivity space receivers (Phase 1), fulfilling Earth-to-moon transfer and lunar orbiting PNT requirements. Here, we show how new proposed GNSS-like solutions tailored to the moon could produce excellent performance as well as many operational and scientific benefits for lunar exploration.
Lunar Augmentations
As part of a joint effort of multiple ESA directorates, ESA is currently working on the definition of a Lunar Communication and Navigation Service (LCNS), within the Moonlight initiative. As of October 2020, ESA is preparing the launch of a dedicated system study to assess LCNS architectures, considering both communication and navigation user needs. This article focuses only on the navigation aspects, describing a potential high-level architecture that could meet the user PNT needs. Thus we refer here to Lunar Navigation System, not LCNS, and the proposed architecture here should then not be considered as representative of the final LCNS architecture.
In spite of being a key technology for enabling the large amount of planned lunar missions, GNSS signals from the Earth constellations can only reach the near-side of the moon or, more generally, the areas in cislunar space, which are not occulted by the moon. Moreover, in view of the required accuracy and availability required to enable autonomous landing and rover guidance, Earth GNSS signals alone are not sufficient. The current navigation approach for these kinds of missions relies on a combination of multiple sensors and interaction with Earth operation teams, limiting the autonomous on-board capabilities and with inevitable latency for even the simplest movement between close locations. A dedicated lunar navigation system could then significantly improve current approaches. This would allow lunar navigation in areas without direct to Earth visibility, enhance the user position accuracy globally and improving overall service availability. The augmentation systems proposed here include additional satellites in lunar orbits and static ranging beacons on the lunar surface.
South Pole Coverage
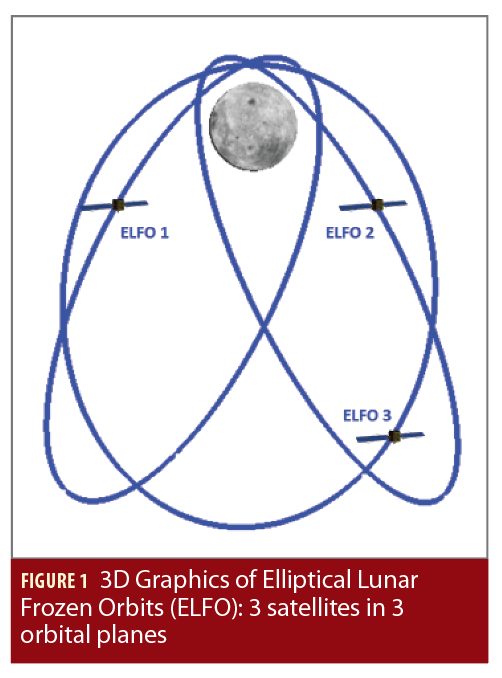
Elliptical Lunar Frozen Orbits (ELFO), illustrated in Figure 1, are of high interest and have been the subject of several previous internal ESA and industrial studies in order to achieve good South Pole coverage. Being frozen orbits, they are highly stable and do not require much station keeping making them suitable for lunar radio navigation systems.
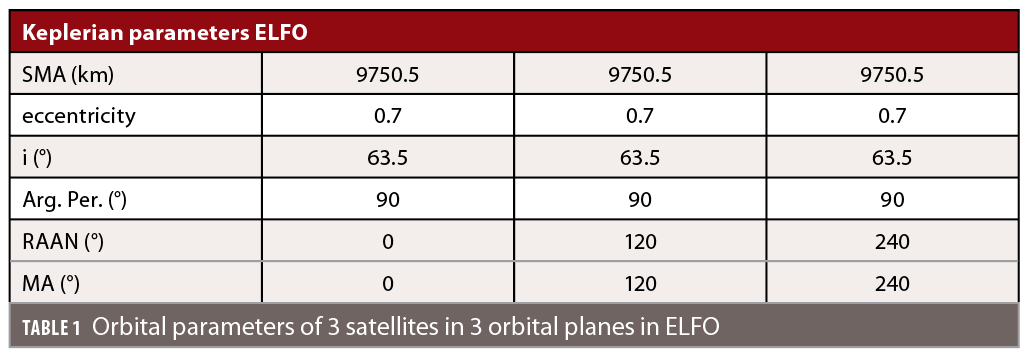
The specific ELFO analyzed here are defined in Table 1 and aim to optimize the visibility over the South Pole. Their orbital period is 24h and their aposelene being over the Southern region of the moon makes them visible for users in the South Pole region for approximately 20h, followed by a 4h outage when the satellite is overflying the North Pole. In this analysis, a set of three satellites in ELFO is evaluated, distributed across three orbital planes.
Lunar PNT Beacon
While satellites around the moon would enable positioning on a larger volume, ranging beacons are the most straightforward means for positioning in a certain region. One major advantage of using a beacon when compared to satellites is that the beacon’s location needs to be determined only infrequently, while for satellites in lunar orbits, continuous precise orbit determination (POD) is necessary. The concept of surface beacons was already used extensively on Earth before the proliferation of GNSS technology, mostly for maritime navigation (e.g. LORAN) and it has been proposed for enhancement of lunar landing. In the case of the moon, the beacon could support the lunar navigation system as follows:
• Transmit ranging signals synchronized to the main LNS orbiters (the purpose of this study);
• Act as reference station for the LNS orbiters;
• Enable local lunar surface differential navigation services;
• Provide Earth GNSS navigation data to lunar users to facilitate the use of Earth GNSS signals;
• Act as a co-location point of multiple selenodetic techniques such as laser retro-reflectors, Earth GNSS receiver and very-long-baseline interferometry (VLBI)-compatible transmitter, which could provide additional interesting scientific possibilities.
The usable range of usability of the beacon transmitted signal is mainly driven by the available radio frequency transmission power (often referred as EIRP, Equivalent Isotropic Radiated Power), the transmission antenna gain pattern and the surface topography. The moon’s topography contains high elevation features, hence the location of the beacon will play a significant role in its usability by the receiver terminals.
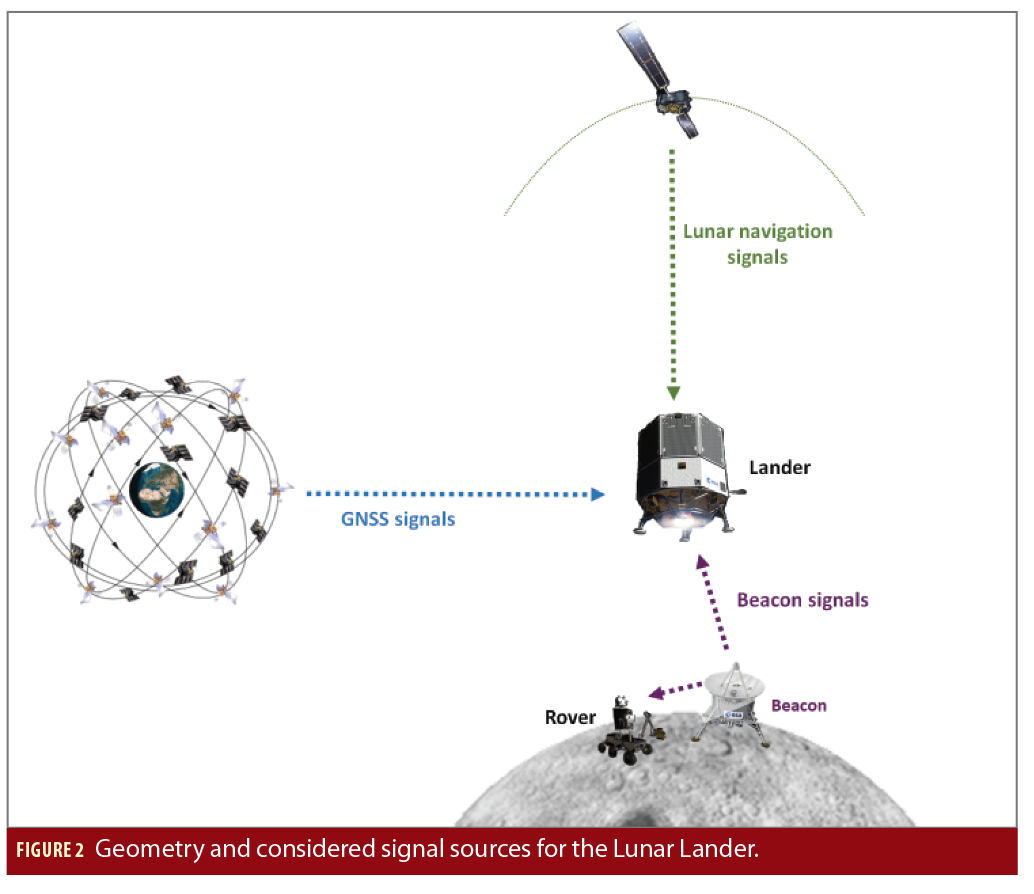
The combined use of surface beacon and lunar orbiters will improve significantly the positioning geometry for lunar landers that target a location in the proximity of the beacon, and surface users in the proximity (see Figure 2).
Visibility and Geometry
The reception of GNSS signals together with signals from satellites in lunar orbits and/or signals from a beacon on the lunar surface is analysed here for two different user scenarios:
• a static receiver on the lunar surface,
• a lunar lander in its final descent and landing phase (D&L).
Simulation Description. The simulation environment used to produce these results considers all aspects of the transmission and reception of Earth GNSS signals in particular:
• realistic transmit power levels;
• realistic 3D antenna patterns;
• GNSS satellites’ attitude law;
• geometry considerations (including free space path loss, Earth and moon occultation);
• receiver characteristics, such as antenna pattern and realistic carrier-to-noise density ratio threshold needed to acquire and track GNSS signals and to demodulate navigation message data.
To represent the state of the constellations at the time of interest, the current constellations’ statuses were updated to correspond to the configuration planned for 2024. In the analysis, the GNSS constellations GPS and Galileo are simulated including 24 operational Galileo satellites distributed in three orbital planes and 31 operational GPS satellites in six orbital planes.
Considering that currently there is no definition for the signal transmitted by the Lunar Navigation System (LNS) satellites, this analysis considered only line of sight (LoS), so a LNS satellite or beacon is considered visible by a user when not occulted by the moon. In addition, we consider a 10-degree elevation mask for a surface user and a 10 degree elevation mask for the signal transmitted by the beacon. Finally, we assume here that the beacon can transmit only when in direct sun illumination, due to power limitations.
The spaceborne GNSS receiver considered in this analysis has the parameters provided in the first part of this article and in this analysis, a single-frequency, in this case E5a/L5, is assumed in order to minimize costs, mass and power-consumption. The pointing/orientation of the receiver antenna and also the number of antennas differ for each user scenario, where the difference is made between a static case of a receiver located on the moon’s surface and a dynamic case of a receiver as part of a lunar lander. The exact configuration for each case is described below.
In summary, the user terminal in these analyses is able to simultaneously receive Earth GNSS signals, LNS satellites signals and surface beacon signals as shown in Figure 2. The analysis reported hereafter assesses the number of visible radio frequency signal sources and the position dilution of precision in order to assess the improvements that LNS satellites and lunar surface augmentation can bring in the two selected scenarios.
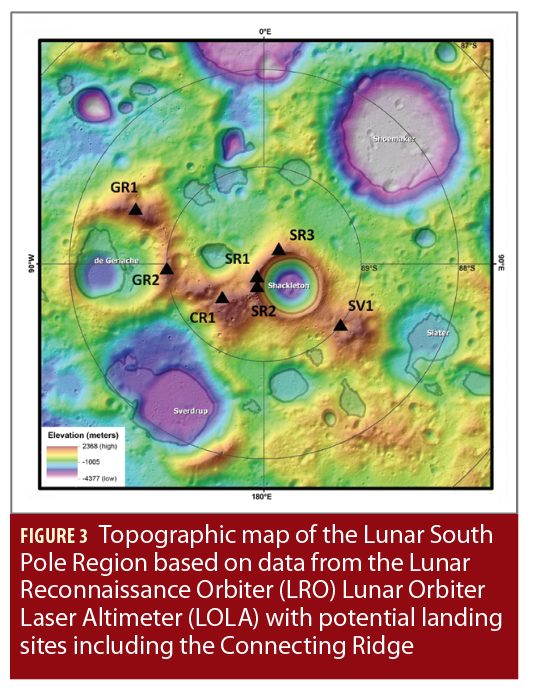
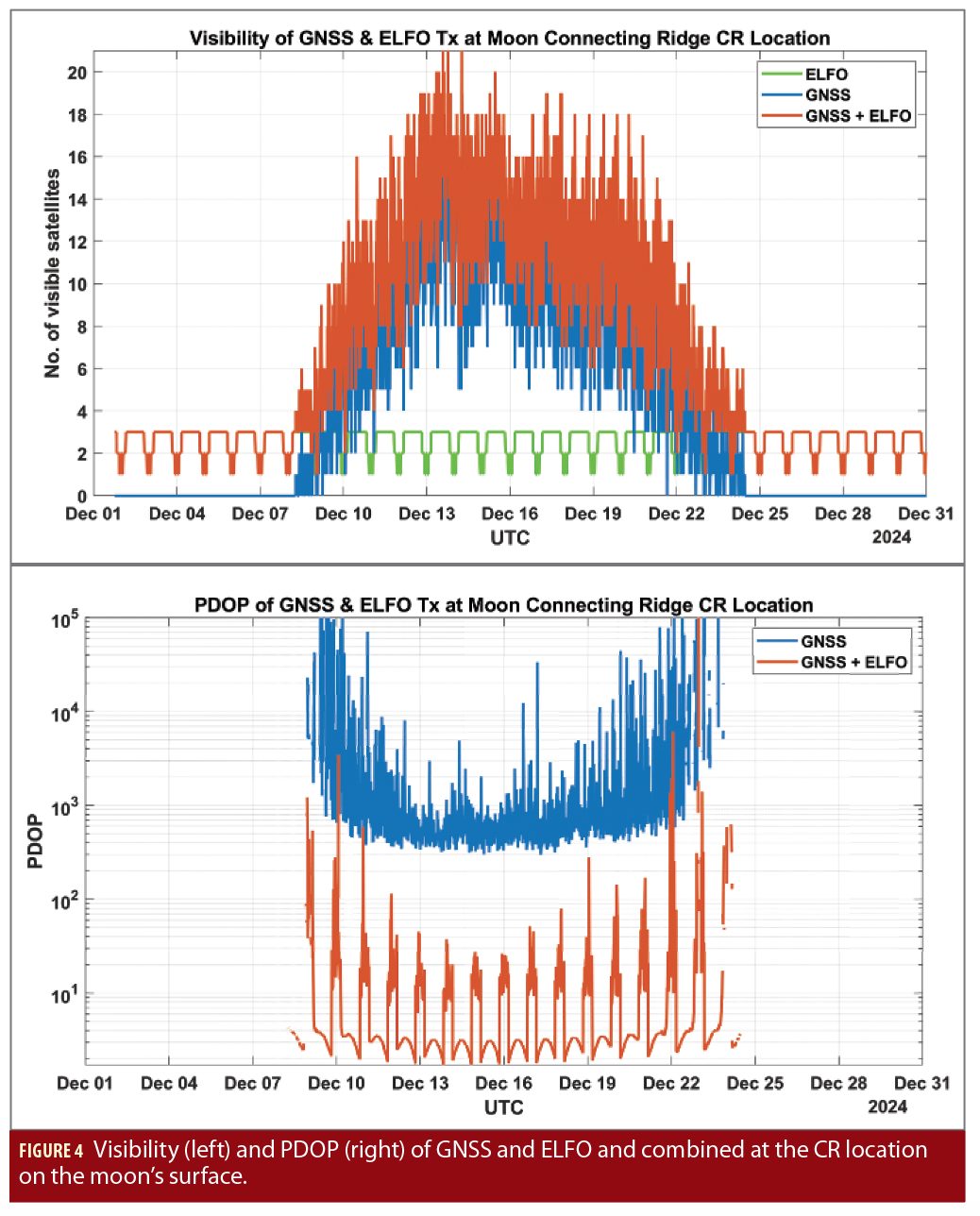
Static scenario. The first scenario investigates the GNSS and lunar satellites signal reception at a surface location close to the South Pole. The Connecting Ridge location is a potential landing site for lunar missions and in the far future for a lunar habitat, because of excellent sun illumination conditions (up to 92.5 % of the time). Figure 3 shows a topographic map of the lunar South Pole region retrieved by the Lunar Reconnaissance Orbiter, including multiple landing sites.
In this scenario, the user Earth GNSS L-band antenna is assumed to be perfectly pointing to the centre of the Earth at all times. The reception of the signals coming from the LNS satellites is constrained with an elevation mask of 10° above surface. This assumption has been made to account for surface terrain and possible mountains near the antenna location.
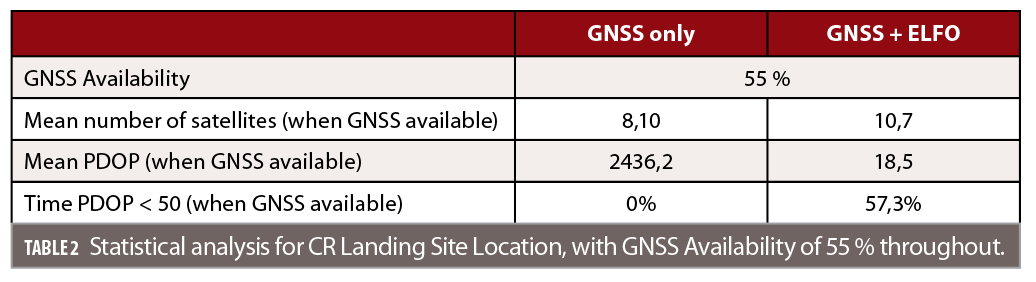
Figure 4 shows visibility results for one month. Out of the three satellites in ELFO, there is at least one satellite visible at all times, going often up to three satellites. The visibility of the GNSS constellations goes up to a maximum of 20 visible satellites, however, for a certain time during the month (approx. 14 days) the GNSS satellites are not visible at all. In fact, due to lunar libration which is occulting the CR1 location and preventing visibility of both the Earth and the GNSS satellites. The exact period of time when GNSS signals are visible could be expected to increase if a more realistic topography map of the area were taken into account in the simulation, given the high elevation of the selected Connecting Ridge site. In Figure 4 (right), the corresponding PDOP results are shown for GNSS only and GNSS plus the three satellites in ELFO. As mentioned earlier, the geometry when using only GNSS signals is very poor and results in high PDOP values with a mean value of 2436, with best case around 1000 making any direct kinematic solutions not viable. When adding satellites in ELFO, the PDOP improves significantly to values down to 1.7 with a mean value of 18,5. Visibility and PDOP statistics are summarized in Table 2.
Dynamic scenario. In the second scenario, the receiver is located on a lunar lander whose landing site is close to the location described in the static scenario (CR1). The landing phase is normally divided into several sub-phases. The phase of interest for this study is often called ”braking phase” for which the altitude starting points can vary between 15 and 30 km+ depending on the selected approach and ends when the lander is about 2-3 km above the surface, leaving only a vertical descent to the target landing location.
Even if absolute position and velocity information are important also in previous orbital phases, they are critical during the braking phase where continuous high accuracy position and velocity information is necessary to allow the control system to adjust the thrust actuation to ensure the final location at the end of this phase is not too far from the target. The capability to recover any position error during the final vertical descent is limited by the amount of on-board fuel available.
The trajectory selected for this study approaches the landing site via the near side of the moon, so that optimal GNSS visibility is expected in the last parts of the trajectory. In the case of the lunar lander scenario, its attitude profile becomes essential, since it cannot be assumed to have only one receive antenna that is always pointing towards the Earth anymore. The lander’s attitude profile is described with one axis pointing towards nadir, the moon center, the second axis is pointing along the velocity direction (along the thrusters) and the third axis complements the coordinate system. In order to achieve good GNSS signal reception, 3 separate receive antennas are assumed to be mounted on the lander, with different pointing directions. All three receive antennas are equipped with the same antenna parameters, as described earlier.
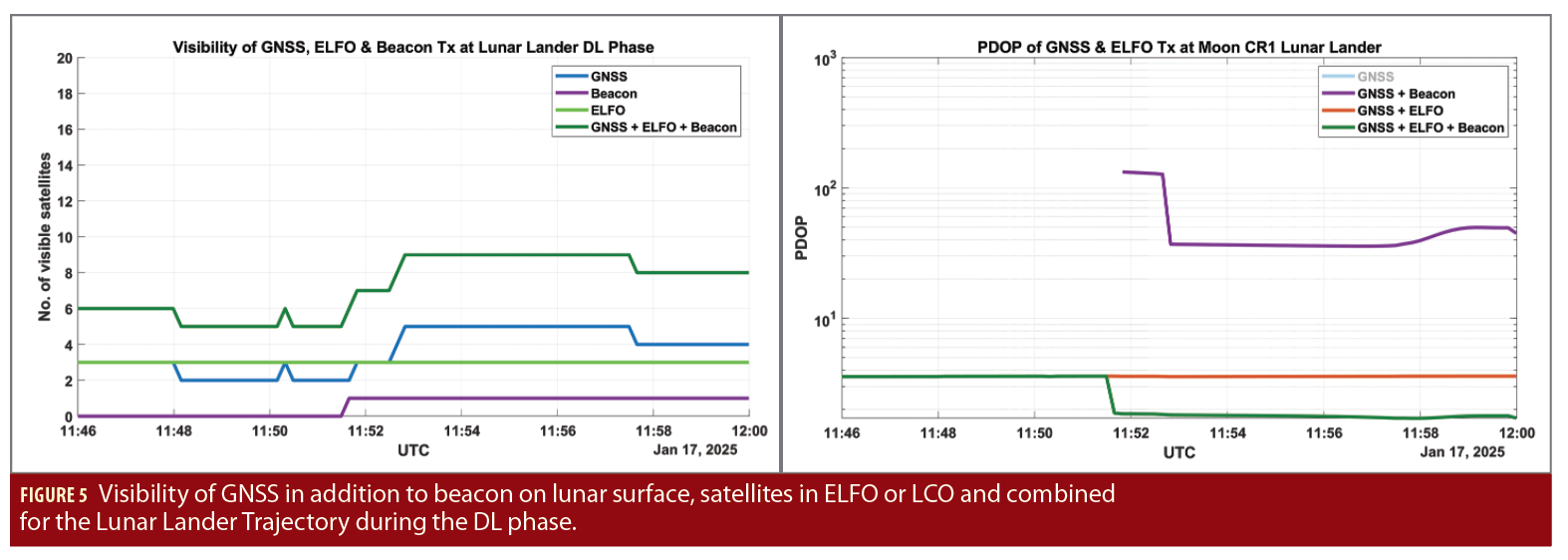
This scenario considered also a lunar beacon located at the landing site itself, so that its visibility is guaranteed for the final phase of the landing. In Figure 5 (left), the visibility is displayed covering individually Earth GNSS, lunar beacon, ELFO satellites as well as their combination. The number of visible GNSS satellites varies between 2 and 5 and at about 11:51 UTC the beacon becomes visible to the lander. For the considered time frame, all of the three satellites in ELFO are visible which is the optimal case. It results in a maximum of nine visible ranging sources.
In fact, it is important to highlight that the landing phase should be planned in order to optimize the number of visible ranging sources, thus improving the overall performance. This is believed to be feasible as part of the mission analysis.
In Figure 5 (right), the resulting PDOP values are shown for the different constellations. The PDOP for GNSS only shows values higher than 1000 and very often a PDOP cannot be computed due to low number of visible satellites, therefore GNSS only PDOP is not displayed in the graph. Combining GNSS and the beacon, it becomes clear that as soon as the beacon becomes visible at approximately 11:51, the PDOP improves, reaching values below 50.
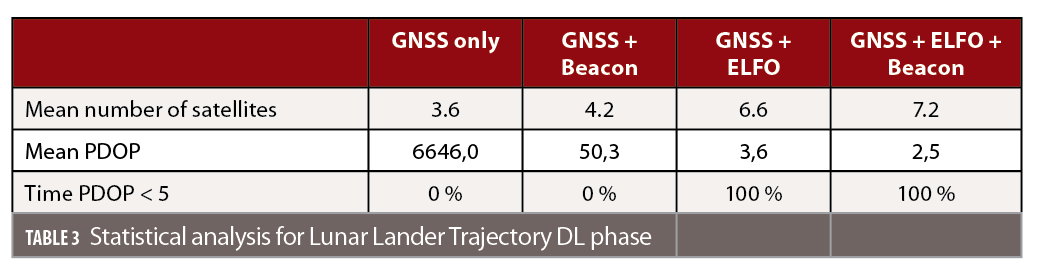
The satellites in lunar orbits have even a stronger impact. When combining Earth GNSS and ELFO satellites, the PDOP reaches values below 5, with a mean of 3,5 and can be enhanced even more when also adding the lunar beacon which results in a mean PDOP of 2,5. More statistical analysis can be found in Table 3.
Towards Global Moon Coverage
For the ultimate goal of providing PNT services globally on the moon and in the low lunar space volume, more satellites in lunar orbits are necessary. Many solutions have been proposed in literature to achieve this goal, however here a more conservative deployment approach is proposed, implementing first Phase 2, with main focus on the South Pole and then moving gradually to global coverage. This approach is justified by the fact that many planned missions in the next decade are expected to target the lunar South Pole, so it is sensible to ensure good service coverage for that area as a first priority.
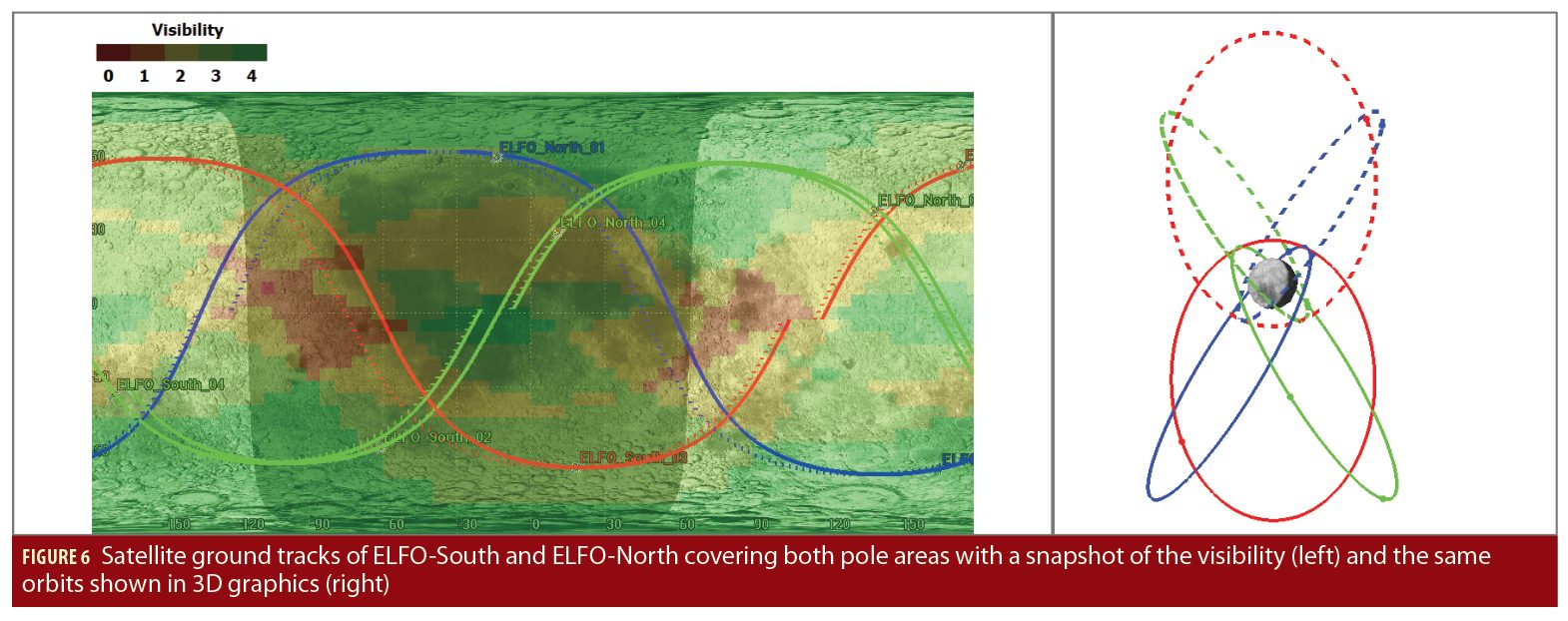
The proposed 3 satellite ELFO constellation could achieve this goal and can be considered the starting point for Phase 3. One possibility to extend the already available constellation towards global coverage could be to include new satellites changing the orbital parameters of the already introduced ELFO in such a way that their aposelene is above the North Pole, instead of the moon’s South Pole (see Figure 6 (right) dashed orbits), creating a de-facto symmetric constellation that maintains the same orbit stability.
Therefore, in the orbital parameters in Table 1 only the argument of perigee has to be changed from 90 into 270, so that the aposelene is above the North Pole. Like this, constant coverage of the Northern hemisphere could be provided. A further improvement could be the addition of a new satellite to both ELFO-South and ELFO-North, reaching overall 8 satellites. In this way, almost constant South and North Pole coverage can be achieved as it is illustrated in Figure 6 (left) which shows the lunar surface and the ground tracks for the 8 proposed satellites.
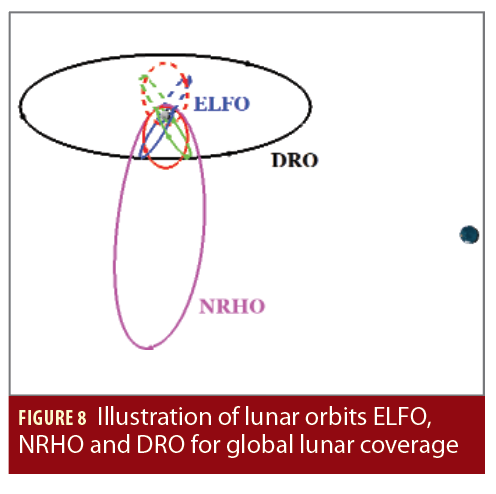
A standalone PVT solution using standard time-of-arrival, GNSS based concepts requires a minimum of four satellites and this is not always reached with the ELFO-South plus ELFO-North constellation. The Lunar Gateway will be a key asset for lunar exploration and it could host a radio navigation payload to provide navigation services. Adding the Gateway in a NRHO orbit (see Figure 8) leads to an almost constant visibility of four satellites at the South Pole area, due to the considerable dwell time of the selected Gateway orbit over the southern regions.
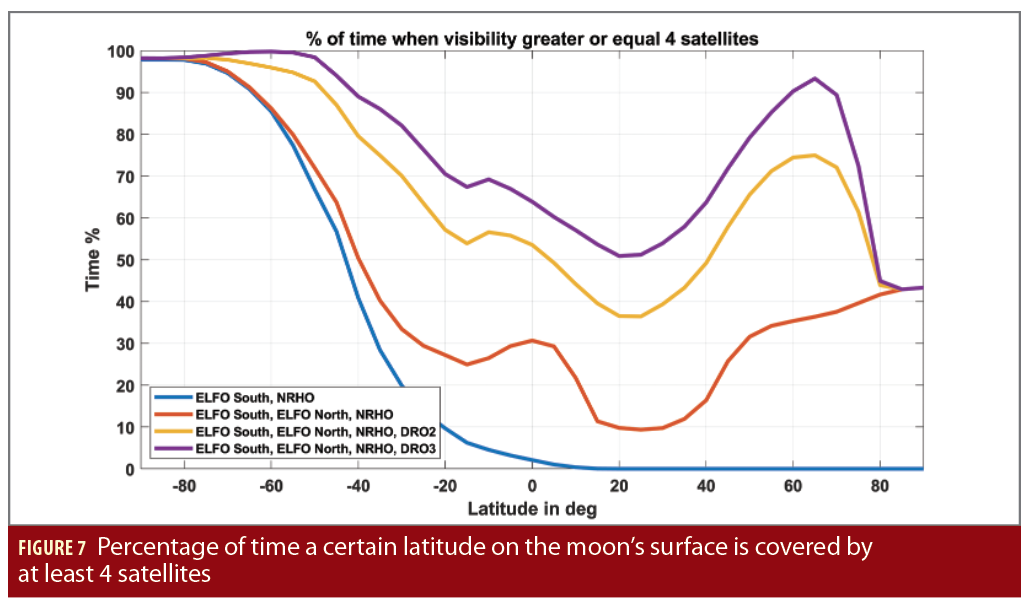
The resulting coverage when considering the ELFO-South, NRHO and the ELFO-North is illustrated in Figure 7, which shows the percentage of time an area is covered with at least four satellites or more as a function of latitude.
Hereby, a global coverage grid with a spatial resolution of 5 degrees in latitude and longitude direction was investigated and the mean values over all longitudes (from -180 to 180 degrees) were determined for a time period of one month. For the South Pole area between -90 to -80 degrees of latitude, a coverage of at least four satellites is achieved for 98 % of the time. However, for the other regions, especially the equatorial regions, only 30 % of the time a coverage of at least four satellites is reached or even less when considering the areas around ± 20 degrees of latitude. In order to also cover these areas, another orbit type, the Distant Retrograde Orbit (DRO) is introduced. DRO are described as extremely stable orbits. Objects in DRO orbit the central body, Earth in this case, in prograde motion but are perturbed by the second central body, the moon, in such a way that they appear to orbit the second central body in a retrograde Keplerian orbit. The DRO considered in this study, is at a distance of 45,000 km from the moon (see Figure 8).
With just two or three additional satellites in DRO with a separation of 180 degrees and 120 degrees respectively, the percentage of time when there are four or more satellites visible increases from 30% up to 55% or 65% with two or three satellites in DRO, respectively. With this constellation, latitudes in the southern hemisphere from –90 until approximately –40 degrees can be covered at least 80% of the time for the case of 2 satellites in DRO and even 90% of the time when adding three satellites in DRO.
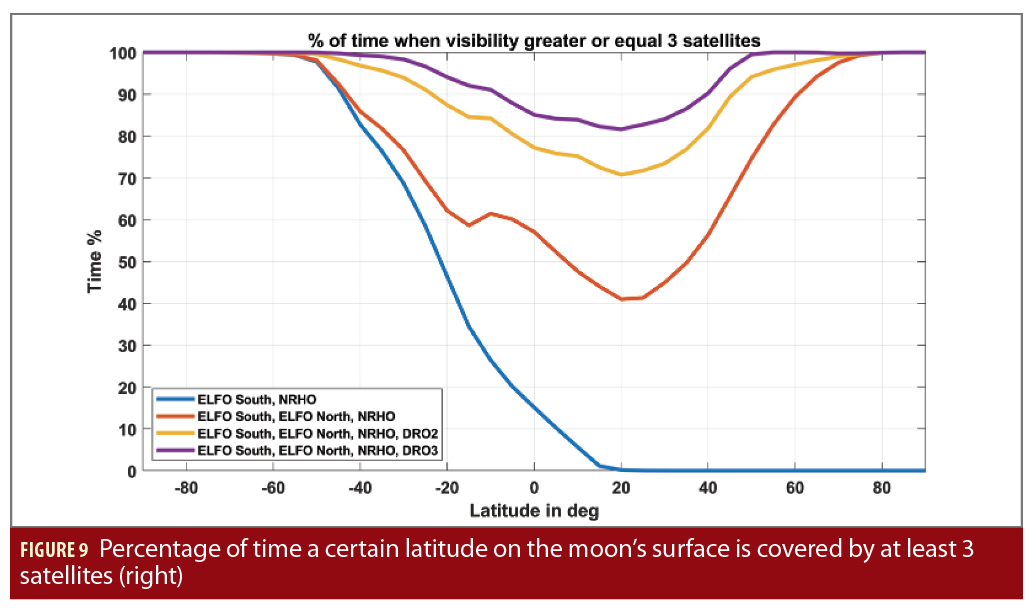
In the case where a surface beacon transmitting ranging signals is present in the surroundings of the receiver, a visibility of three satellites would be sufficient to generate a position solution. Therefore, in Figure 9, also the percentage of time when the visibility is at least three satellites over different latitudes is determined. In the case of having four satellites in ELFO-South, four satellites in ELFO-North focusing on the North Pole plus the Gateway in its NRHO, the southern hemisphere of the moon from -90 degrees to -40 degrees of latitude can be covered at least 85 % of the time.
In addition, the area around the North Pole between 60 to 90 degrees in latitude can be covered at least 90 % of the time. The coverage for the equatorial regions, however, is only ensured for 40 % of the time. When adding two or three satellites in DRO, the visibility in the areas around the equator can be significantly improved. With a total amount of 11 or 12 satellites, the moon could be globally covered for at least 70 % (for two satellites in DRO) or 80 % (for three satellites in DRO) of the time with at least three visible satellites. This also underlines the benefits that a surface beacon would bring.
Based on the above results, the progressive deployment of a lunar navigation system seems plausible and the rationale to follow, whereby the weight of GNSS satellites in the final PNT solution can be steadily reduced as the lunar constellation is increased. While a solution based on GNSS-satellites only (e.g.: Phase 1 of the Lunar Navigation Roadmap) is able to fulfil the PNT needs for the Earth-to-moon transfer and lunar orbit users, this is not sufficient for lunar landing nor lunar surface operations, where additional ranging “augmentations” are deemed necessary.
We have seen that when focusing on the South Pole, which is targeted for a large number of missions planned for this decade, this may be achieved by complementing the GNSS constellation with a simple three satellite lunar constellation and the use of a lunar surface beacon (e.g.: Phase 2 of the Lunar Navigation Roadmap). This can provide an excellent availability and PDOP values. This Phase 2 system could then be gradually upgraded with additional lunar orbiting ranging satellites, specifically selected to improve the service availability at the other lunar latitudes (e.g.: Phase 3 of the Lunar Navigation Roadmap).
It has been shown that a pragmatic Phase 3 intermediate solution consisting of 4 ELFO-South satellites and an additional ranging source located on the Gateway station could already provide a possible autonomous lunar navigation system from the South Pole up to the lunar equator, if the landing and surface operations are performed in selected periods when sufficient ranging sources are available. This could be further enhanced to northern latitudes (including North Pole) by means of an ELFO-North constellation and 1 to 3 DRO orbiting satellites.
In the final configuration proposed here, 12 lunar orbiting ranging sources (including one on the Gateway) could allow a complete, autonomous moon PNT surface service with good PNT solutions available between 40% to 100% of the time. If complemented by a local ranging beacon at the intended landing sites, PNT availabilities would be above 80% for all lunar surface locations. However, it is important to stress again that this is only one potential option, not necessarily the final architecture of LCNS.
Scientific Opportunities
On top of serving as an accurate time and position source, a GNSS-based positioning lunar radio navigation system would also bring a large number of scientific opportunities. This can be viewed from two different perspectives: first, those that are enabled by the new positioning and timing accuracies available; and, secondly, those directly coming from the system itself.
The first part has already been addressed in previous sections, as the LNS is being designed in order to allow precise positioning of any spacecraft in the moon vicinity or the moon surface, e.g. autonomous navigation of a rover or a satellite precise orbit determination.
The second part however targets how the system itself can be used as a scientific tool. GNSS technologies were developed to enable precise navigation on Earth, and various scientific experiments were able to arise from such a system. Precise positioning is the primary use of GNSS measurements, allowing, among others, the study of crystal deformation due to tectonic plates movement and Earth interior.
As is well known, GNSS is also extensively used on Earth to characterize the Earth’s ionosphere and for detailed assessments of the Earth’s troposphere. This non-exhaustive list could also be applied to the lunar environment when using a lunar PNT system. As of now, the main technique that allows very precise measurements of the moon parameters has been Lunar Laser Ranging (LLR), where a laser pulse is sent by an observatory located on Earth and bounced off a retro-reflector located on the moon’s surface. However, such a technique suffers from the limited number of Earth stations, which are not evenly spread, the limited number of retro-reflectors on the moon surface as well as from the moon-Earth geometry.
Furthermore, since LLR is the most used technique, biases intrinsically related to it could impact the final products, e.g. lunar ephemeris, reference frames or selenoid. It has been estimated that adding new retro-reflectors on the lunar surface would enhance the precision of the measurements by a factor of 1.5 to 4, depending on their location. As mentioned earlier, lunar ranging beacons could be equipped with additional instruments, such as laser retro reflectors, Earth GNSS receiver and S/X-band transmitter (telemetry, VLBI) and as such could provide additional points of study on the lunar surface. In particular, being designed to contain multiple geodesy sensor types, these beacons could serve as ideal co-location points on the moon.
The new sources of measurements (VLBI, GNSS) will have a direct impact on the selenodesy products, i.e. the lunar reference systems, ephemeris and selenoid, as each technique adds more information on the position of these points, resulting in an increased precision. The possibility of LLR points transmitting telemetry signals produces a faster, more accurate solution, as multiplying techniques allows faster correlation of the moon parameters. Moreover, it will in return enhance geodesy products, as the definition of the Earth orientation and reference systems are made using LLR products. Adding them will therefore not only benefit the moon’s parameters definition but the Earth’s, too.
In addition to these, a basic study of relativistic effects, which have been enunciated by Albert Einstein in his general relativity theory, has been mainly studied using LLR measurements. Such a network of ground-based beacons could also shed some light on those ideas and further confirm the equivalence principle proposed by Einstein. Many other experiments, like the study of moon’s interior or the moon’s very thin “atmosphere”, called exosphere, could be added to the range of possible studies that could be enabled with the LNS, since signals sent by beacons or satellites could be impacted by this layer around the moon when passing through it. Studies of collocation points on the moon have attempted to quantify the benefit both for the moon and the Earth definitions and have confirmed the potential scientific impact of a lunar PNT system, not only as a mission enabler, but also as a science mission itself.
Summary and Conclusions
Despite the wide variety of missions planned for the moon, a global lunar navigation (and communication) infrastructure is still missing. If developed, this could bring a high number of operational benefits and become a major enabler for lunar institutional and commercial missions. This concept has been discussed in a two-part paper through the proposal of the progressive deployment of a Lunar PNT service, based on the use of GNSS technology and consisting of three phases. A solution based on the use of existing GNSS-constellations (Phase 1) could already be sufficient to fulfil the navigation requirements of Earth-to-moon transfer and lunar orbiting users. When targeting South Pole landing and surface operations, it has been shown that navigation user requirements may be fulfilled by adding a simple three-satellite lunar constellation together with a lunar surface-ranging beacon (Phase 2). Furthermore, it has been shown that this initial constellation could then be gradually upgraded with additional ranging satellites in lunar orbit specifically selected to improve the service availability at the other lunar latitudes. Various solutions have been analyzed to reach the desired performance levels and leading to a final proposal of 12 lunar satellites (Phase 3), which could provide an autonomous PNT global coverage service for the moon.
In general, the proposed use of GNSS technologies and the provision of an autonomous lunar navigation system shows great potential to provide a large number of operational and scientific benefits.
Authors
Miriam Schönfeldt is an ESA graduate trainee within the German Trainee Programme, currently working in the Galileo System Engineering Unit. She received her M.Sc. degree in electrical engineering and information technology from the Karlsruhe Institute of Technology.
Antoine Grenier is an ESA Young Graduate Trainee, currently working in the Galileo System Engineering Unit. He has an engineering degree in land surveying and geomatics, specialized in GNSS processing and geodesy.
Anaïs Delépaut is an ESA Young Graduate Trainee researching radio navigation systems for the moon. She completed her Master’s degree in electronics and telecommunication at the Brussels Faculty of Engineering with a thesis on wireless positioning for the Internet-of-Things.
Richard Swinden is a navigation system engineer in the Commercial User Segment and Navigation System Validation Section at ESA – ESTEC. His current responsibilities include providing system engineering support to lunar-related projects, following artificial intelligence/machine learning activities in the GNSS and cyber security monitoring domain and following co-funded activities to develop innovative PNT solutions.
Pietro Giordano is in charge of multiple activities related with space GNSS receivers and R&D in space GNSS receiver technology at ESA, as technical officer for POD receiver in Sentinel, Proba3 missions, development of GNSS spaceborne receivers for real time on-board POD (P2OD concept), development of LEO PNT payloads, support for definition of new AGGA chip, development of GNSS space borne receivers for lunar missions and definition of future LNS.
Javier Ventura-Traveset has worked at ESA for more than 30 years. He is now the Head of the Galileo Navigation Science Office and the Executive Secretary of the ESA GNSS Scientific Advisory Committee, coordinating all GNSS scientific and GNSS Moon exploration activities of ESA. Dr Ventura-Traveset is an Academician at the Royal Academy of Engineering in Spain.




