
As a significant number of people and robotics venture into space, infrastructures providing critical services such as GNSS must be considered on a large extra-terrestrial scale to support these explorations and settlements.
The next global strategic priority in space, the moon, has dozens of missions planned for this decade, with private as well as public participation. Yet no common support navigation and communication infrastructure has been proposed for them, meaning that each individual mission must develop its own way to navigate in space.
Over the last few years, interest in moon exploration has steadily increased. It is clearly the next global strategic priority in space. This push is driven by the recent discovery of water ice at the lunar poles, which adds to the plentiful mineral-based resources on the moon and has the potential to provide not only drinking water but also oxygen for breathing and fuel for power generation and thrusting. The moon is also an attractive location for developing technologies and techniques for future more challenging human endeavours that go deeper into space.
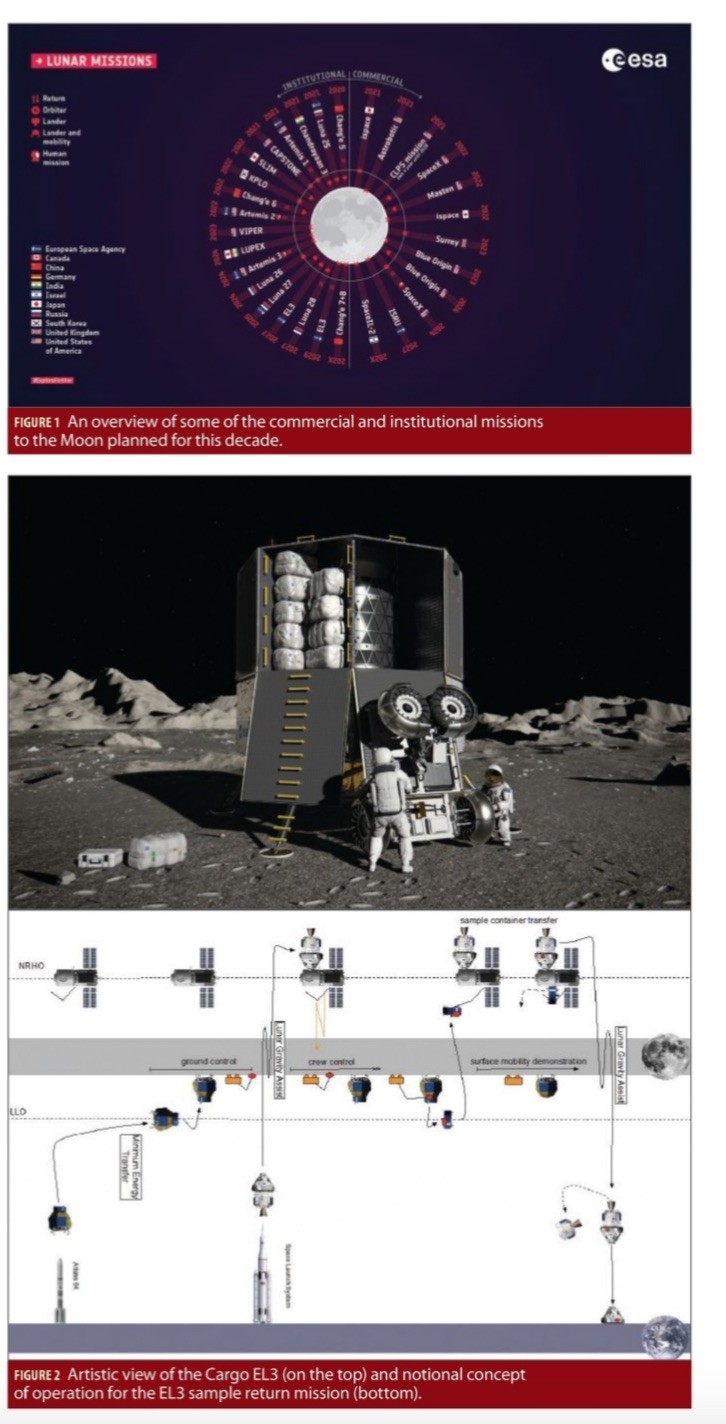
While space agencies are and will remain the driving force behind space exploration activities, private players’ interest and contribution are increasing alongside public-private partnerships (see Figure 1).
NASA’s Artemis programme to return humans to the moon in the 2024-2028 timeframe provides a major stimulus to traffic growth, with several accompanying robotic missions designed to pave the way for human exploration. In addition to the traditional Agency programmes, the private sector has undertaken significant involvement for purely commercial applications. NASA’s Commercial Lunar Payload Services (CLPS) partnership with the private sector seeks to generate an economically sustainable path for lunar exploration and resource exploitation. Under CLPS, NASA will guarantee two payloads per year, starting in 2021, to be landed on the moon by the private sector.
Lunar ambitions come not also from the major space institutions in Europe, China, India, Japan and Russia as well as private entities across the globe. Amongst others:
• The Artemis lunar spacecraft consists of NASA’s Orion crew module and the European Service Module (ESM). Developed by ESA, the ESM will provide propulsion, life support, environmental control and electrical power to Orion.
• The space Gateway structure, to be launched by the partners of the International Space Station during this decade, will be assembled and operated in the vicinity of the moon, where it will move between different orbits. The Gateway will weigh around 40 tons and will include a significant contribution from ESA and other agencies.
• The European Large Logistic Lander (EL3), an intermediate size vehicle (1.5–2 tons) to be launched on Ariane 64 from ArianceGroup; it targets cargo delivery to lunar base camps and enabling science (see Figure 2). Candidates include lunar sample return as well as the deployment of a radio telescope on the far side of the moon or a pilot plant for the production of oxygen from lunar regolith (the layer of unconsolidated rocky material covering bedrock). ESA also pursues missions of opportunity such as PILOT for demonstrated autonomous hazard detection and avoidance and PROSPECT, investigating lunar volatiles through drilling and sample analysis. Both will fly onboard the Russian Luna landers as part of the Roscosmos exploration program.
• The Chandrayaan program, also known as the Indian Lunar Exploration Programme, is an ongoing series of outer space missions by the Indian Space Research Organisation (ISRO). It incorporates lunar orbiters, impactors, soft landers and rover spacecraft.
• The Chinese Lunar Exploration Program (CLEP), also known as the Chang’e Project, with a series of robotic moon missions by the China National Space Administration (CNSA). This includes lunar orbiters, landers, rovers and sample return spacecraft.
• The Russian Lunar Program (Luna-Glob) consists of a series of robotic exploration missions and targets a manned mission by 2030. ESA is already contributing to LUNA-27, planned to land on the South Pole by 2025, with a scientific payload.
Accordingly, the number of missions targeting lunar altitudes is on the cusp of an explosion with dozens planned in the next decade. The majority are institutional-based, but they are complemented by commercial initiatives targeting both lunar orbit and surface locations.
Despite this high number and wide variety of missions, there is currently no common support infrastructure in place around the moon, which means that each individual mission must develop and transport its own means of autonomous navigation and communications with Earth. This is not only inherently inefficient but also imposes limitations on capabilities. Furthermore, on-board sensor redundancy is critical to ensure successful missions, especially for complex missions such as landers. This is demonstrated by the two lunar lander missions in 2019 that were not able to touch down successfully after problems reportedly with an IMU sensor in one case and with the on-board guidance software in the other.
Therefore, access to a dedicated navigation infrastructure could alleviate much of the burden and limitations currently faced as well as make possible a completely new spectrum of mission concepts. These could be enabled by the provision of high accuracy, availability and reliability navigation services, which could be naturally combined in a joint dedicated Lunar Communication and Navigation system (LCNS), given the synergies between the two services.
GNSS For Lunar Support
All moon missions require accurate knowledge of the spacecraft position and velocity. Currently, this burden falls to ground operations teams computing position and velocity using ranging with telemetry, tracking and control (TT&C) or dedicated stations. The use of a GNSS spaceborne receiver capable of processing Earth GNSS signals and providing position, velocity and time to the satellite avionics system could be a major enabler for moon institutional and commercial missions. If proven feasible, the availability of GNSS-like services for moon missions could bring the following additional important benefits.
• Enable autonomous navigation, including more efficient and effective manoeuvres;
• Reduce tracking and operational cost;
• Provide back-up/redundant navigation for human safety;
• Provide timing source for hosted payloads;
• Enable a large number of scientific opportunities.
Given this high potential, we must then ask:
Could the GNSS technology, well-proven and demonstrated on Earth, be of use on the moon?
Could we rely on existing Earth GNSS systems and signals as a starting point for a global lunar coverage?
To answer, we begin by identifying the main challenges for Earth-GNSS signals reception at moon distances:
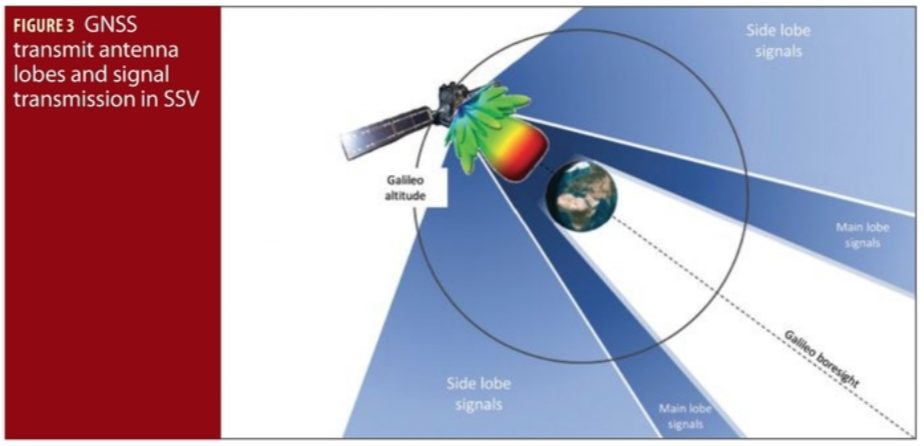
• The long distance and the occultation of the Earth, challenging the reception and processing of Earth GNSS signals at lunar altitudes. As depicted in Figure 3, above the MEO orbit, and certainly at moon distances, only a small part of the GNSS transmit antenna main lobe is visible from the other side of the Earth, while the antenna side-lobes start to play a major role.
• The very poor geometry of the Earth GNSS constellation from a lunar user point-of-view, with all satellites appearing to come from the same point, resulting in a very high value of the geometrical dilution of precision (DOP).
• The limited access to navigation data, due to the very low signal to noise ratio, which is mostly below the optimal navigation data demodulation threshold.
As we will explain here, these limitations may be overcome by implementing high-sensitivity space receivers that fuse GNSS measurements with advanced orbital dynamic models, the use of directive high-gain antennas to maximize signal reception and the use of multi-constellation. Doing so maximizes the number of available satellites, assuming a combination of both Galileo and GPS as baseline.
Recently, multiple studies have been performed concerning the feasibility of using GNSS signals for Earth-to-moon transfer orbits and lunar orbits. In the context of ESA’s European Student Moon Orbiter, the advantages of embedding an onboard GNSS receiver and the resulting signal availability of GPS and Galileo have been discussed (see online version of this article for 28 references throughout: insidegnss.com/moon), namely considering a standalone receiver with an acquisition threshold of 35 dB-Hz. Improvements were made demonstrating the importance of using an orbital filter (OF). The most significant amount of work in the field was performed by the ESPLAB of EPFL with the development of a proof-of-concept receiver called WeakHEO, capable of acquiring and tracking GPS L1 Coarse/Acquisition (C/A) signals down to 15 dB-Hz. In the SANAG receiver, enhancements to the WeakHEO receiver front end produced a multi-constellation receiver working with GPS, Galileo and BeiDou, showing acquisition and tracking working as low as 15 and 12 dB-Hz respectively.
All these previous studies considered symmetric GNSS antenna transmission patterns over all azimuth angles. In the frame of the SANAG project, the azimuthal dependency of the GPS transmit antenna patterns was analyzed in terms of position dilution of precision (PDOP) and signal availability for a receiver similar to SANAG on a spacecraft in a medium transfer orbit (MTO). This study showed that a satellite in an Earth to moon transit will receive GNSS signals mostly from the side-lobes. The same realistic GPS antenna pattern was simulated by NASA, showing the feasibility of using GPS for the Lunar Gateway station. All these studies confirmed that the knowledge of the side-lobes power and the realistic GNSS transmission antenna pattern outside the main lobe is paramount for missions at moon altitudes, but were all limited to GPS signals only, lacking information for other constellations such as Galileo. This was recently completed by ESA analyses on the use of GNSS signals using realistic, asymmetric, GPS and Galileo transmission antenna patterns in detail for multiple lunar missions scenarios, showing the high interest of using multi-constellation GNSS for a robust service.
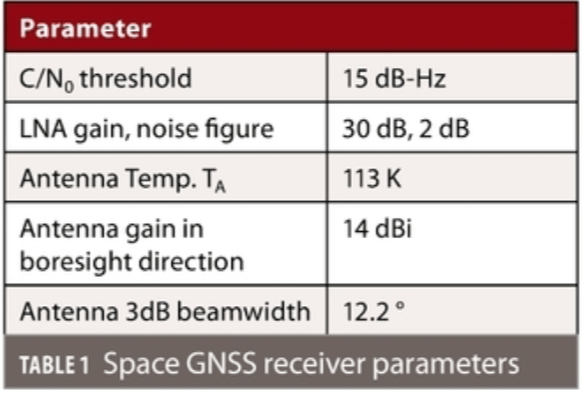
These promising simulation results were further backed experimentally in April 2019 as part of the NASA Magnetospheric Multiscale Mission (MMS), when GPS signals were received and a satellite orbit was obtained up to a distance of 29 Earth Radius (187.166 km) away, i.e. about half the Earth-moon distance. Remarkably, these experimental tests were performed using a GPS receiver with a standard tracking threshold (23 dB-Hz) and a low gain antenna (~6.5 dBi), allowing for further improvements with new GNSS receiver products. For example, as targeted in the context of ESA NAVISP program, the receiver parameters of Table 1 are specified and considered reachable with today’s technology.
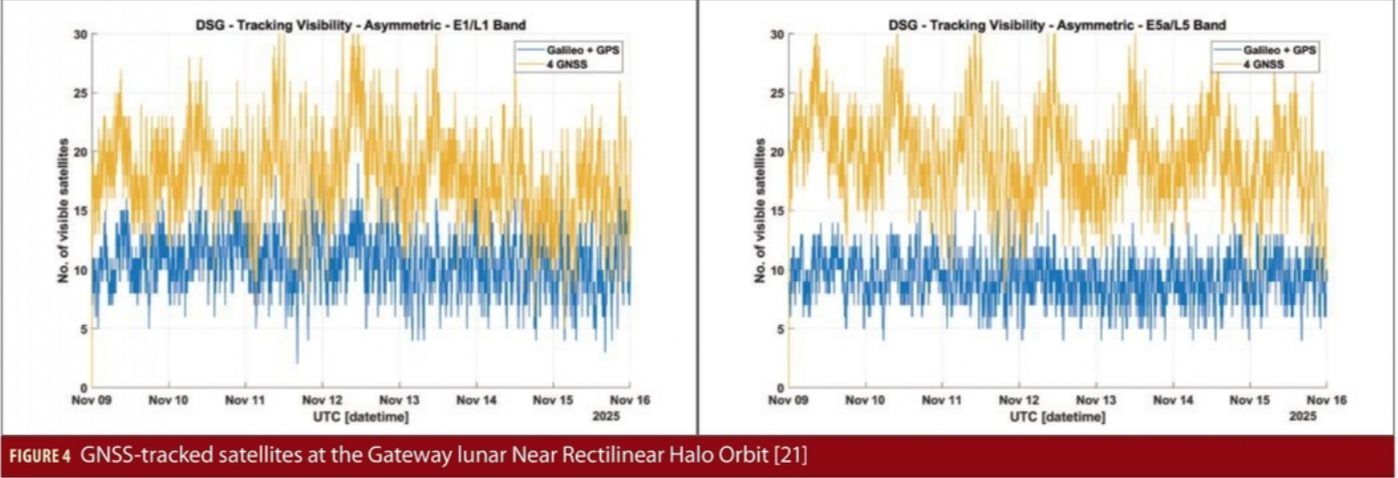
This provides a potential improvement of about 16–17 dB with respect to the MMS GPS receiver unit, which could certainly allow the reception of GNSS signals at moon distance. For example, NASA performed a high-fidelity simulation to assess the feasibility of GPS reception at the Gateway lunar Near Rectilinear Halo Orbit (NRHO), that was calibrated against the MMS flight data, using measured GPS transmitter antenna patterns and assuming an Earth-pointed high-gain antenna (~14 dBi). The simulation showed a major positioning accuracy improvement when compared with the traditional ground based Deep Space Network approach for the same orbit. These were further complemented by ESA, by adding Galileo and also enhancing the receiver thresholds to state-of-the-art figures, and showed that an average of 10 satellites could be tracked at the Gateway orbit in both L1 and L5 frequencies (see Figure 4):
Based on all these analyses, we conclude that the use of high-sensitivity GNSS receivers can allow the navigation requirements on lunar missions to be met for Earth to moon transfer and lunar orbit operations. However, when considering lunar landings or moon surface operations, additional enhancements or augmentations are needed to compensate for the bad geometry and the fact that dynamic filters may not be usable (e.g. on the moon surface). This calls for a Lunar PNT implementation roadmap in multiple phases, aligned to the growing moon exploration navigation needs.

Lunar PNT Implementation Roadmap
The PNT requirements for moon missions will differ in the different phases conceived for moon exploration missions, with a progressive increase in the level of performance:
• Earth-Moon Transfer Orbit;
• Lunar Orbit (low, elliptical and Lagrange orbits);
• Descent/landing/ascent;
• Lunar surface operations (with priority on the South pole); and
• Critical operations / integrity (e.g. with astronauts).
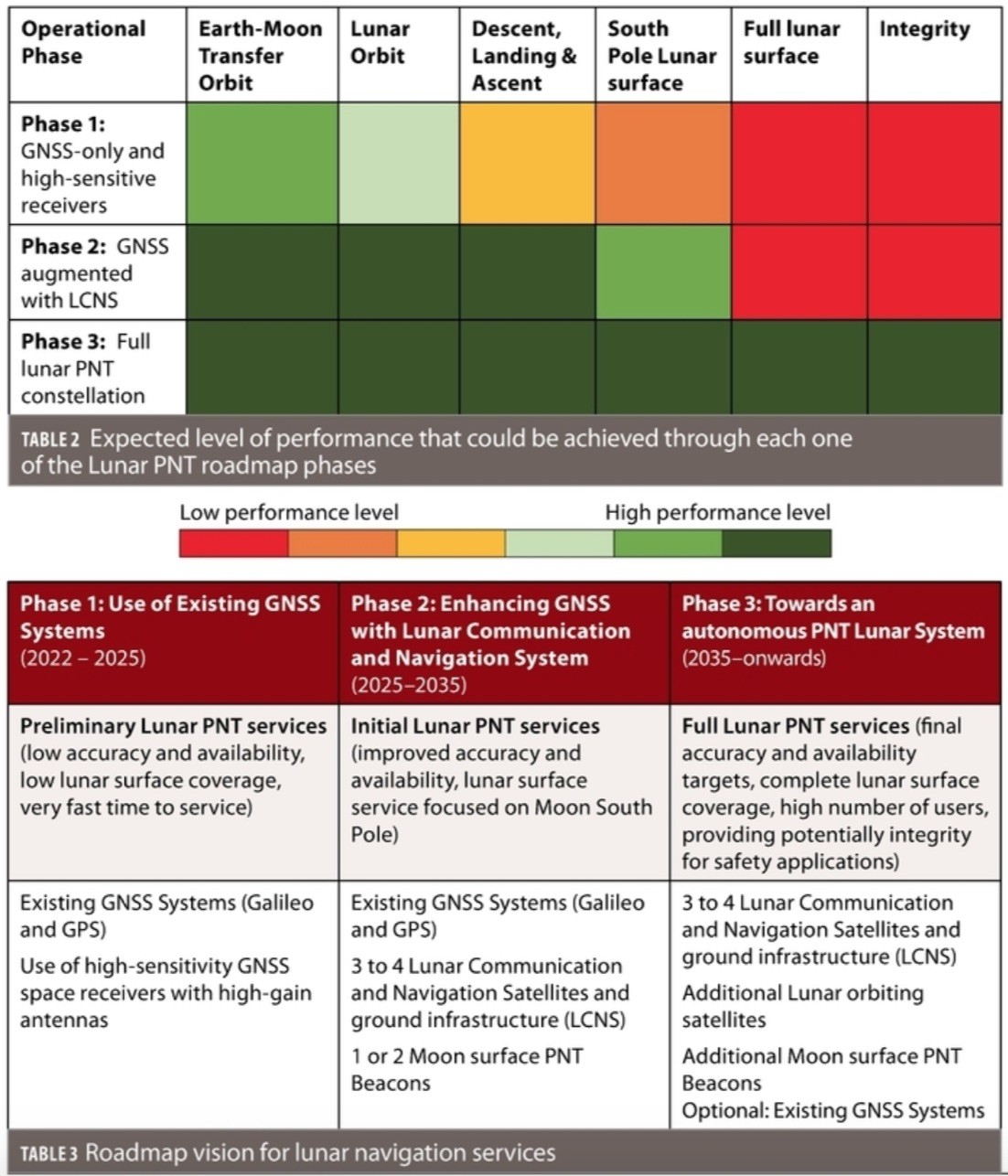
To respond to these incremental needs, and in coherency with the moon exploration calendar demands, a three-phase roadmap of moon PNT services based on GNSS technologies has been preliminarily defined by ESA:
Phase 1: Use of High-sensitivity space Receivers (2022-2025): Based on the reception of Earth GNSS signals with high-sensitivity receivers, onboard dynamic filters and high-gain antennas. This should provide initial services for the Earth-moon transfers and lunar orbit operations.
Phase 2: Lunar Communication and Navigation Services (2025-2035): Enhancing the above with the transmission of additional ranging signals from moon orbit and from the moon surface. This should allow a major reduction of the geometric dilution of precision and increase in service availability, which, in turn, would translate into enhanced lunar orbit navigation services and initial landing/surface PNT services (e.g.: on the moon South Pole).
Phase 3: Full Lunar PNT system (2035-onwards): This phase should enable providision of PNT services on the whole moon surface and enhance the availability and accuracy on moon orbit and lunar South Pole. This could be obtained by complementing Phase 2 with additional lunar orbiting satellites and moon surface beacons. This phase could also facilitate provision of integrity services for safety-critical applications, leading to increased autonomy.
Table 2 illustrates the expected level of performance achievable through each phase. The implementation of a dedicated LCNS service, in complement to GNSS, should enhance significantly the accuracy and availability compared to GNSS-only for lunar orbit services and allow a good operational service for moon landing/ascent and surface operation on the moon South Pole.
Table 3 summarizes this initial roadmap vision.
ESA is currently working in the context of this roadmap, with a series of developments ongoing or planned linked to the different phases.
Current Work
The high-sensitivity GNSS spaceborne receiver required for phase 1 is now under development in a multi-step approach, with the first objective to demonstrate the technology in space via an In-Orbit-Demonstration (IOD) before end of 2024. TRL level 5 and 6 are currently under development as part of the NAVISP contracts kicked-off by ESA at the beginning of 2020. In parallel, ESA plans to kick-off by the end of 2020 the development of the PFM for the IOD of the concept, targeting a specific hosting satellite. At the time of writing, an accommodation study is ongoing to assess the feasibility to host the IOD mission in ESA-SSTL Lunar Pathfinder mission, aiming to orbit the moon and with planned launch date of mid-2023. The receiver PFM will be developed under NAVISP as part of “NAVISP-El1-039: Earth Moon GNSS Spaceborne Receiver for In-Orbit-Demonstration.”
The IOD experimentation will allow ESA and European industry to confirm the feasibility of the concept in space with relatively low budget and effort, paving the way for the development of operational products that might be used in future missions. In fact, ESA has already planned the development of fully space qualified (class 1) products following the standard ECSS life cycle to be ready for 2025 onwards missions. The development approach for the GNSS receiver and antenna is described in more detail within the European Space Technology Harmonisation Roadmap for On-Board Radio Navigation Receivers published in 2020.
As mentioned previously, the use of Earth GNSS for lunar missions has some limitations, in particular for users that do not have a very predictable dynamic. Therefore, as part of Phase 2 (and eventually Phase 3), ESA plans to develop an infrastructure to provide communication and navigation services to future lunar missions. This concept is called LCNS (Lunar Communication and Navigation Services) within the ESA Moonlight initiative and aims to deploy a constellation of satellites orbiting the moon, together with Earth ground segment and potential Lunar segment.
The first iteration aiming to collect user needs/requirements, assess the limitations of Earth GNSS and propose lunar augmentation system is part of NAVISP-EL1-023 activities. Together with the development of the first GNSS receivers as described earlier, these activities also include this system study, planned to conclude by the end of 2020. In 2021, ESA plans to kick-off phase A/B1 system studies to cover the full LCNS. LCNS procurement was initiated in July 2020.
The deployment and operation of a lunar constellation is a significant effort, which will require multiple assets to provide global lunar coverage and high availability, as targeted in Phase 3 of the roadmap. ESA advocates the development of an open standard for the signal and user navigation concept to allow interoperability with potential infrastructure deployed by other agencies or commercial partners. In this context, ESA will pursue international cooperation towards a common standard that could potentially become part of the already established standards for deep space exploration.
The current navigation approach for lunar missions relies on a combination of multiple sensors and interaction with Earth operation teams, limiting the autonomous onboard capabilities and with inevitable long time for even the simplest movement between close locations. An additional lunar navigation system based on GNSS technology would significantly augment the current approaches. This would allow lunar navigation in moon-obstructed areas and enhance the user position accuracy globally by improving the overall system geometry and number of visible satellites as well as improving overall service availability. Part 2 of this article, to be published in a subsequent issue of Inside GNSS, will describe a possible progressive deployment of this lunar navigation infrastructure.
In Part 2 we will describe intermediate and global lunar PNT autonomous solutions, providing increased autonomy with respect to GNSS-Earth constellations. We will show that our proposed solutions, based on GNSS-like technologies, could bring excellent performances together with a large number of operational and scientific benefits for moon exploration.
Authors
Miriam Schönfeldt is an ESA graduate trainee within the German Trainee Programme, currently working in the Galileo System Engineering Unit. She received her M.Sc. degree in electrical engineering and information technology from the Karlsruhe Institute of Technology.
Antoine Grenier is an ESA Young Graduate Trainee, currently working in the Galileo System Engineering Unit. He has an engineering degree in land surveying and geomatics, specialized in GNSS processing and geodesy.
Anaïs Delépaut is an ESA Young Graduate Trainee researching radio navigation systems for the moon. She completed her Master’s degree in electronics and telecommunication at the Brussels Faculty of Engineering with a thesis on wireless positioning for the Internet-of-Things.
Richard Swinden is a navigation system engineer in the Commercial User Segment and Navigation System Validation Section at ESA – ESTEC. His current responsibilities include providing system engineering support to lunar-related projects, following artificial intelligence/machine learning activities in the GNSS and cyber security monitoring domain and following co-funded activities to develop innovative PNT solutions.
Pietro Giordano is in charge of multiple activities related with space GNSS receivers and R&D in space GNSS receiver technology at ESA, as technical officer for POD receiver in Sentinel, Proba3 missions, development of GNSS spaceborne receivers for real time on-board POD (P2OD concept), development of LEO PNT payloads, support for definition of new AGGA chip, development of GNSS space borne receivers for lunar missions and definition of future Lunar Radio Navigation Systems.
Javier Ventura-Traveset has worked at ESA for more than 30 years. He is now the Head of the Galileo Navigation Science Office and the Executive Secretary of the ESA GNSS Scientific Advisory Committee, coordinating all GNSS scientific and GNSS Moon exploration activities of ESA. Dr Ventura-Traveset is an Academician at the Royal Academy of Engineering in Spain.
References
[1] NASA, “NASA Artemis programme,” [Online]. Available: https://www.nasa.gov/specials/artemis/.
[2] NASA, “NASA CLPS programme,” [Online]. Available: https://www.nasa.gov/content/commercial-lunar-payload-services.
[3] ESA, “European Service Module,” [Online]. Available: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/European_Service_Module.
[4] ESA, “European Large Logistic Lander (EL3),” [Online]. Available: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/European_Large_Logistics_Lander.
[5] Euroconsult, “Prospects for Space Exploration,” [Online]. Available: http://www.euroconsult-ec.com/shop/index.php?id_product=129&controller=product.
[6] E. HALON, „The Jerusalem Post,“ 18 April 2019. [Online]. Available: https://www.jpost.com/israel-news/spaceil-reveals-preliminary-reasons-behind-beresheet-crash-587117. [Zugriff am 13 July 2020].
[7] M. Guptan, „The Week,“ 16 November 2019. [Online]. Available: https://www.theweek.in/news/sci-tech/2019/11/16/how-did-chandrayaan-2-fail-isro-answer.html. [Zugriff am 13 July 2020].
[8] G. Impresario, G. D’Amore, C. Stallo, L. Ansalone and A. Tuozzi, “GNSS and Galileo for CIS-Lunar and Moon Navigation,” in 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 2018.
[9] G. Impresario, R. M. L. Parrella, A. Colucci, M. Albano and S. Pizzurro, “Prospect commercial routes in the Earth-Moon System’s Service Volume,” in 70th International Astronautical Congress, Washington, DC, USA, 2019.
[10] G. B. Palmerini, M. Sabatini and G. Perrotta, “En route to the Moon using GNSS signals,” Acta Astronautica, vol. 4, pp. 467-483, February 2009.
[11] V. Capuano, P. Blunt, C. Botteron and P.-A. Farine, “Orbital Filter Aiding of a High Sensitivity GPS Receiver for Lunar Missions,” Navigation, vol. 64, no. 3, pp. 323-338, 05 June 2017.
[12] V. Capuano, C. Botteron, J. Leclère, J. Tian, Y. Wang and P.-A. Farine, “Feasibility Study of Gnss As Navigation System to Reach The Moon,” Acta Astronautica, vol. 116, pp. 186-201, July 2015.
[13] L. Musumeci, F. Dovis, J. S. Silva, P. F. Silva and H. D. Lopes, “Design of a High Sensitivity GNSS receiver for Lunar missions,” Advances in Space Research, vol. 57, no. 11, pp. 2285-2313, March 2016.
[14] P. F. Silva, H. D. Lopes, T. R. Peres, J. S. Silva, J. Ospina, F. Cichocki, F. Dovis, L. Musumeci, D. Serant, T. Calmettes, I. Pessina and J. V. Perelló, “Weak GNSS Signal Navigation to the Moon,” in Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, 2013.
[15] V. Capuano, F. Basile, C. Botteron and P.-A. Farine, “GNSS-based Orbital Filter for Earth Moon Transfer Orbits,” The Journal of Navigation, vol. 69, no. 4, pp. 745-764, November November, 2015.
[16] V. Capuano, P. Blunt, C. Botteron, J. Tian, J. Leclère, Y. Wang, F. Basile and P.-A. Farine, “Standalone GPS L1 C/A receiver for lunar missions,” Sensors, vol. 16, no. 3, pp. 347-368, March 2016.
[17] P. Blunt, C. Botteron, V. Capuano, S. Ghamari, M. Rico and P.-A. Farine, “Ultra-high sensitivity state-of-the-art receiver for space applications,” in Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), ESA Workshop, 2016.
[18] E. Shehaj, V. Capuano, C. Botteron, P. Blunt and P.-A. Farine, “GPS Based Navigation Performance Analysis within and beyond the Space Service Volume for Different Transmitters’ Antenna Patterns,” in 13th PEGASUS-AIAA Student Conference, Berlin, August, 2017.
[19] L. B. Winternitz, W. A. Bamford, A. C. Long and M. Hassouneh, “GPS Based Autonomous Navigation Study for the Lunar Gateway,” in 42nd Annual American Astronautical Society (AAS) Guidance, Navigation and Control Conference, Breckenridge, CO, United States, 2019.
[20] A. Delépaut, M. Schönfeldt, P. Giordano, D. Blonski, R. Sarnadas, L. Ries and J. Ventura-Travaset, “A System Study for Cislunar Radio Navigation Leveraging the Use of Realistic Galileo and GPS Signals,” in Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, Florida, 2019.
[21] A. Delépaut, P. Giordano, J. Ventura-Travaset, D. Blonski, M. Schönfeldt, P. Schoonejans, S. Aziz and R. Walker, “Use of GNSS for lunar missions and plans for lunar in-orbit development,” Advances in Space Research, May 2020.
[22] SYDERAL SWISS SA, The University of Nottingham, Harp Technologies Ltd, “NAVIMOON – EARTH-MOON NAVIGATION / SYSTEM STUDY AND DEVELOPMENT OF A HIGHLY-SENSITIVE SPACEBORNE RECEIVER PROTOTYPE,” [Online]. Available: https://navisp.esa.int/project/details/88/show.
[23] GMV, Saphyrion, “EARTH-MOON NAVIGATION: SYSTEM STUDY AND DEVELOPMENT OF A HIGH-SENSITIVE SPACEBORNE RECEIVER,” [Online]. Available: https://navisp.esa.int/project/details/93/show.
[24] SSTL, “SSTL Lunar Pathfinder mission,” [Online]. Available: https://www.sstl.co.uk/what-we-do/lunar-mission-services.
[25] ESA, “NAVISP 2020 workplan,” [Online]. Available: https://navisp.esa.int/uploads/files/documents/5dcab21771521923937073.pdf.
[26] ESA, “European technology harmonisation roadmap on On-Board Radio Navigation Receivers,” [Online]. Available: https://tec-polaris.esa.int/eclipse/public/redirect?url=/eclipse/i-layout?applicationId=dccm&projectId=1303&goto=/web/document/document-edit!getCurrentIssue?document.id=26375&configFile=true.
[27] ESA, „Who’s ready to serve the lunar missions?,“ [Online]. Available: https://www.esa.int/Applications/Telecommunications_Integrated_Applications/Who_s_ready_to_serve_the_lunar_missions.
[28] International Space Station Agencies, “International Deep Space Standards,” [Online]. Available: https://www.internationaldeepspacestandards.com/.




