 Figure 1, 3, 4 & 5
Figure 1, 3, 4 & 5Q: What is Doppler collision and is it a problem in GNSS?
A: Doppler collision is a physical effect in code-division multiple access (CDMA) systems where code measurement errors are observed due to cross-correlation effects. Doppler collision may occur when the Doppler frequency between signals from two different transmitters is smaller than the code lock loop bandwidth.
Q: What is Doppler collision and is it a problem in GNSS?
A: Doppler collision is a physical effect in code-division multiple access (CDMA) systems where code measurement errors are observed due to cross-correlation effects. Doppler collision may occur when the Doppler frequency between signals from two different transmitters is smaller than the code lock loop bandwidth.
In GPS, GLONASS, and Galileo, Doppler collision is rarely a problem because MEO satellites have equal Doppler frequencies for only very short periods. However, in systems where ground-based or geostationary transmitters are used for ranging the impact of this effect cannot be ignored.
The Problem
To understand how Doppler collisions can affect a CDMA signal let us consider the GPS C/A code for example. The 1023 chip GPS C/A pseudorandom noise (PRN) codes have ideal auto correlation peaks of +1023 and auto- and cross-correlation values of +63, –1, or –65. This results in a 24-decibel-protection level between the primary auto-correlation peak and any cross-correlation peak.
Most of the time additional protection is provided by the fact that each received signal has its own Doppler frequency offset as the result of each tracked satellite having a different range rate with respect to the receiver. However, if the difference between the Doppler frequencies from two different satellites is small enough, the cross-correlation peaks may interfere with the primary peaks and cause tracking errors. The tracking errors are similar to multipath in that a secondary correlation peak is distorting the main peak.
How small does the relative Doppler have to be for a risk of Doppler collision to appear? If relative Doppler is larger than the receiver code loop noise bandwidth (typically one hertz), then the tracking error is filtered and no Doppler collision effect is observed. In the case of GPS, although many instances over a given day occur in which the relative Doppler between two GPS satellites is small, the duration of each occurrence is very short because the satellites’ Doppler shifts are changing rapidly. However, for geostationary or ground-based transmitters, the relative Doppler remains small for significant periods and the effect can be severe.
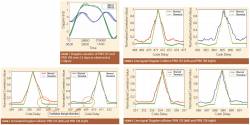
Figure 1 (see inset photo, above right, for figures) shows the Doppler frequencies of two U.S. Wide Area Augmentation System (WAAS) satellites as observed over a two-and-a-half-day period at Calgary, Canada. Geostationary satellites are not perfectly stationary, and both WAAS satellites have slowly changing range rates. PRN 135 has a 12-hour period while PRN 138 has a more significant 24-hour component. As a result two periods occur each day when the relative Doppler between the two satellites is less than one hertz. Each of these periods lasts on the order of two hours.
Of course, a Doppler collision does not necessarily occur just because two satellites are transmitting signals with the same Doppler frequency. In addition, a maximum cross-correlation must occur. For this to happen, the receiver must be located where the relative delay between the two PRN codes corresponds to a peak (either +63 or –65 for GPS C/A) in the cross-correlation function of the two signals involved.
Geographically, for two geostationary transmitters such as WAAS 135 and 138, the cross-correlation amplitude creates a hyperbolic interference pattern that in low- and mid-latitudes is approximated by north-south running stripes where cross-correlation occurs. The width of each cross-correlation zone on the Earth’s surface is on the order of hundreds of meters as a result of the projection of the 293-meter-long C/A code chips onto the surface.
Figure 2 (see photo at the top of this article) shows the cross-correlation of PRNs 135 and 138 projected onto a 25-kilometer east-west by 5-kilometer north-south area centered at our lab at the University of Calgary (51 N, 114 W).
In addition to being located where a cross-correlation can be observed, the data bits must also be correlated for a Doppler collision to occur. In general, the magnitude of the cross-correlation peak will change as the data bits on each signal vary. If the relative Doppler of two GPS satellites was less than one hertz for a period of a few minutes, for example, at least the magnitude of the cross-correlation would change with every data bit transition that was not common between the two signals.
Unfortunately, navigation messages are often correlated across satellites within a GNSS. In the case of WAAS, the transmitted data bits are synchronized, which results in a narrow strip between the coverage areas of two WAAS satellites where navigation bits are highly correlated. As a result, when the relative Doppler is less than one hertz and a user is located at a cross-correlation peak, the same distorted correlation peak will be repeatedly observed and tracked, resulting in a Doppler collision.
To demonstrate the effect, we observed real signal samples in several locations around the University of Calgary (on our lab roof and also in an open field to minimize multipath) and also generated multipath free samples using a GPS/SBAS simulator. A software receiver was used to process the data.
Figure 3 presents plots of correlation peaks acquired from simulated data. The distortion in the peak cannot be attributed to multipath because the signal was generated in a simulator with the multipath-error function disabled. It is important to note that the distortion of the correlation triangle for one satellite is reflected as a mirror image in the correlation triangle of the second satellite.
Similar results were obtained with live data. Figure 4 shows the same effect in real data collected from the roof of our lab while Figure 5 shows live data collected in a soccer field approximately 400 meters to the west.
Both figures show the computed and observed correlation peaks, including a secondary trough to the right on PRN 135 (and on the left on PRN 138). The green line is the theoretical correlation peak while the red and purples lines show the correlation triangles generated from live samples.
The distortion is more observable, and more symmetric, in Figure 5 even though the theoretical trough is further from the main peak at this location. Note that the antenna in Figure 4 is in a moderate multipath environment (a roof) while the data shown in Figure 5 was collected in an open field. The code delay on the x-axes is not absolute, as there is a different receiver clock offset at each location.
These kinds of correlation triangle distortions can result in large multipath-like ranging errors. The paper by L. Lestarquit and O. Nouvel, listed in the Additional Resources section near the end of this article, shows that cross-correlation can lead to up to 9 meters of ranging error for a receiver with standard correlator spacing, and the error can be even higher, up to 18 meters, if the cross-correlation peak has a transition from –65 to +63.
Solutions
The simplest solution to the Doppler collision problem is to simply not use geostationary satellites for ranging. A second simple approach is to know when and where Doppler collisions will occur and either remove or de-weight measurements during collision epochs.
Finally, because the error is similar to multipath, many of the standard multipath reduction receiver designs — for example, narrow correlator spacing — will also reduce the effects of Doppler collision.
Impact on IRNSS and BeiDou
Not very many applications use SBAS signals for ranging. However, BeiDou uses and IRNSS plans to use both geostationary and geo-synchronous satellites for ranging signals. The effect of Doppler collision on code measurement error, in addition to stationary multipath error, will be significant.
The impact will depend on the codes used and on receiver design. BeiDou B1 uses 2046-chip truncated codes; so, unlike GPS, where only two values of cross-correlation peak (other than –1) occur 25 percent of the time, in BeiDou many possible cross-correlation values exist. The maximum peaks occur less than one percent of the time, although the others are frequent enough that Doppler collisions will occur. For IRNSS, the open service will use a binary phase-shift keying (BPSK) modulation similar to GPS; so, again depending on the codes used, the effect could be significant.
An additional problem is that, because Doppler collision results in a multipath-like bias in the code measurement that can last for minutes to hours, using code measurements from these geostationary satellites to estimate the corresponding carrier phase ambiguities is risky. Obviously not many carrier-phase measuring receivers use standard correlator spacing, but this effect will have to be considered.
Further Reading
For a detailed introduction to GPS C/A codes and their cross correlation properties, refer to:
Van Dierendonck, A. J., and G. A. McGraw, and R. J. Erlandson “Cross-Correlation of C/A Codes in GPS/WAAS Receivers,” in Proceedings of the ION GPS-99, September 14–17, 1999, Nashville, Tennessee USA, pp. 581–590
For an introduction to Doppler Collision and its effects on GNSS satellite tracking, refer to:
Balaei, A. T., and D. M. Akos, “Cross Correlation Impacts and Observations in GNSS receivers,” Navigation: Journal of The Institute of Navigation, vol.58, no.4, Winter 2011, pp. 323–333
Lestarquit, L., and M. Malicorne, M. Bousquet, and V. Calmettes “Correction Algorithm For SBAS C/A Code Interference,” in Proceedings of the ION GPS/GNSS 2003, September 9–12, 2003, Portland Oregon USA, pp. 1345–1354
For further results of the effects of Doppler collisions, refer to:
Lestarquit, L., and O. Nouvel “Determining and Measuring the True Impact of C/A code Cross-Correlation on Tracking,” in Proceedings of the IEEE/ION PLANS 2012, April 23–26, 2012, Myrtle Beach, South Carolina, pp. 877–885
The software receiver used in this work is described in (and included with):
Gleason, S., and M. Quigley and P. Abbeel, “A GPS Software Receiver,” Ch 5 of GNSS Applications and Methods, S. Gleason and D. Gebre-Egziabher, eds., Artech, Boston, 2009




