March 14, 2015
Equations 1 – 11
How does a GNSS receiver estimate velocity?
Equations 1 – 11Q: How does a GNSS receiver estimate velocity?
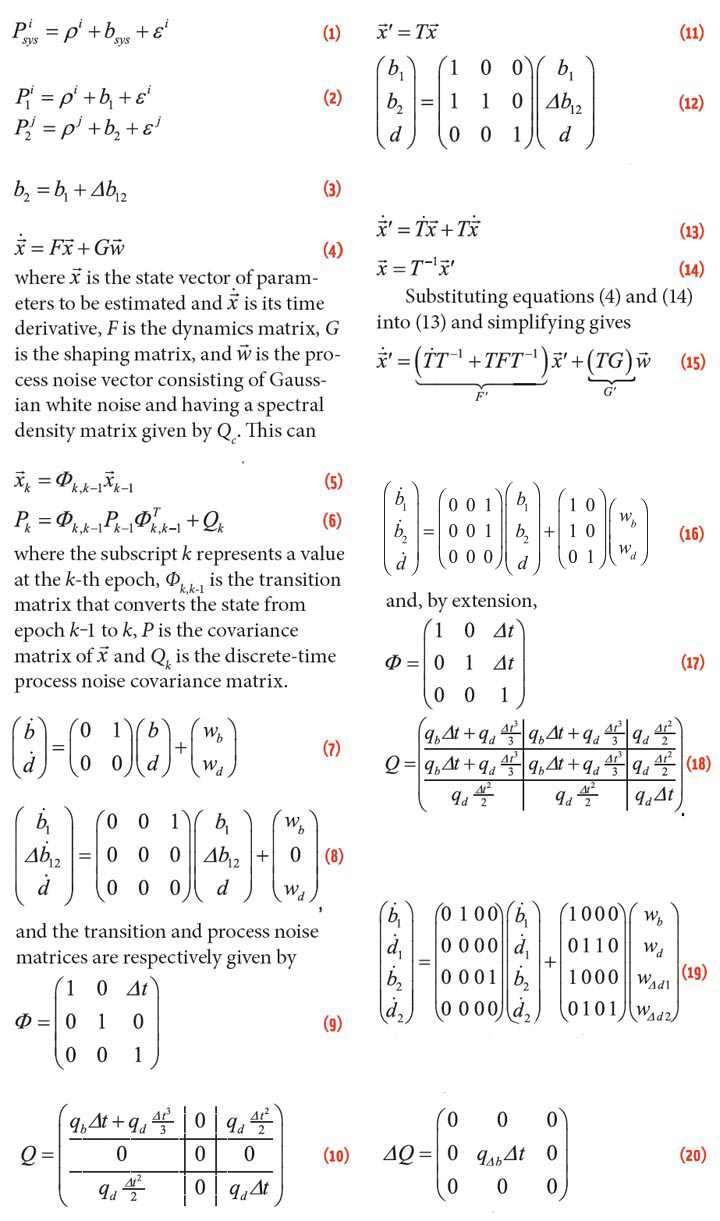
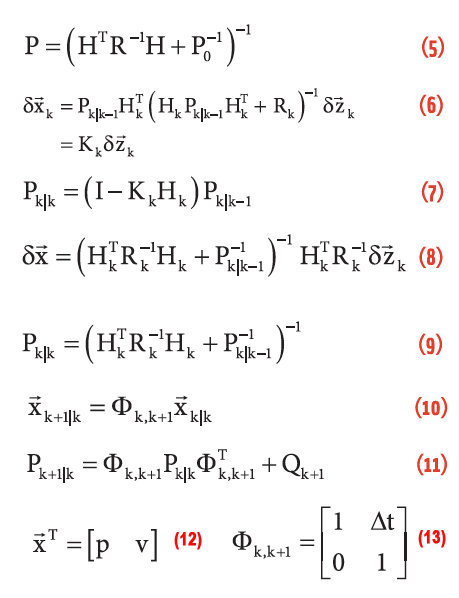
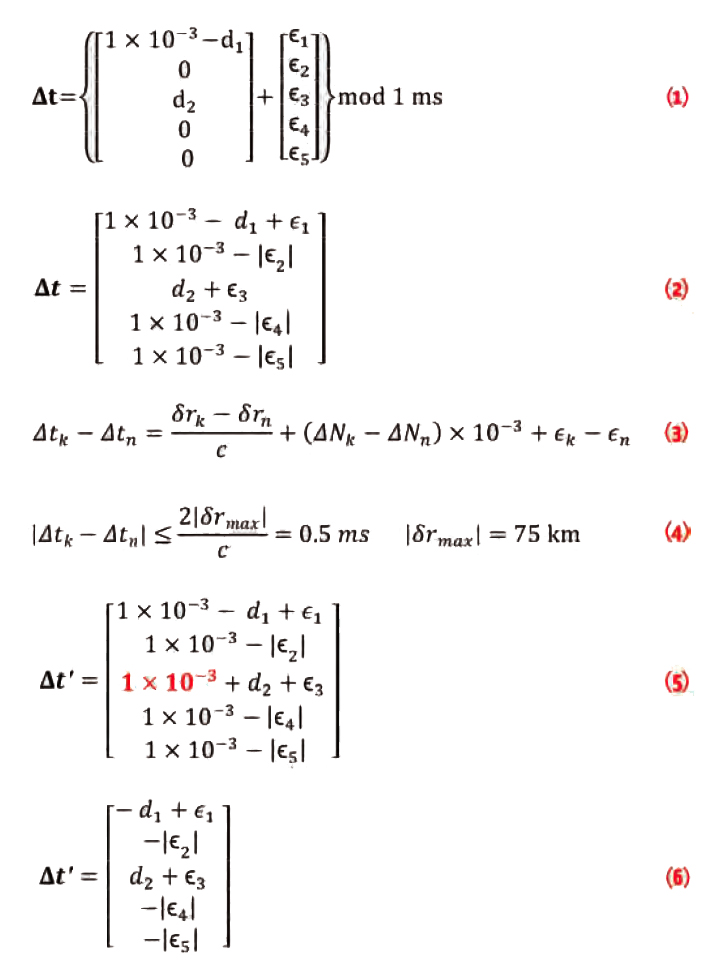
A: Stand-alone single-frequency GNSS receivers represent the largest slice of the commercial positioning market. Such receivers operate mainly in single point position (SPP) mode and estimate velocity either by differencing two consecutive positions (i.e., approximating the derivative of user position) or by using Doppler measurements related to user-satellite motion.
By Inside GNSS