Working Papers explore the technical and scientific themes that underpin GNSS programs and applications. This regular column is coordinated by Em. Univ.-Prof. Dr.-Ing. habil. Dr. h.c. Günter W. Hein.
Precise Point Positioning (PPP) techniques can be defined as processes where a single GNSS receiver can precisely compute its position (down to centimeter level) by autonomously correcting its raw pseudorange and carrier phase measurements using the PPP correction message content. PPP corrections data include the constellations’ orbits, clocks, code, and phase biases. They are provided to the receiver via different types of communication channels. The PPP enabled receiver handles these corrections in a real-time process.
PPP based positioning techniques have been extensively investigated and developed in recent years. These methods are now rather mature and provide very good means to achieve in real-time a few centimeters of accuracy and precision in remote areas, where other solutions like real-time kinematic (RTK) are impracticable or too expensive. One main advantage of PPP approaches is that they provide a global means to achieve high accuracy based on a global and low density network of base stations. There is no need for a very dense network of stations in the vicinity of the user, which is often unfeasible in remote areas.

Although PPP algorithms are the cornerstones of these methods, another important issue for their practical use is the way the PPP corrections can be provided to the user receiver. So far, typical solutions encompass:
- Internet, using fixed or mobile internet connections like mobile phone networks (3G/4G). This is a simple solution that suffers from a number of telecommunications issues such as connection discontinuities, unavailability or bad quality of the transmission in remote areas, and costs or limitations for data transmission. Use of such a solution for PPP broadcast to users would also generate a few gigabytes of data transmission per user per month. A generalized use to millions of users (for example, in cars) could rapidly exceed the network capacity.
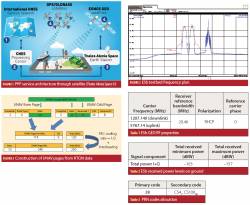
- Satellite-based PPP solutions. These channels are more adapted to such a broadcast and do not suffer from the above described limitations. Commercial broadcast of such proprietary PPP service by specific Geostationary satellite channels is available (see O. Heunecke and H. Heister in Additional Resources) but requires proprietary receivers and remains expensive, thus limiting its use. Broadcasts using other satellite orbits have also been tested on Highly Elliptic Orbits (HEO) on the Quasi-Zenith Satellite System (QZSS) (C. H. Wickramasinghe and L. Samarakoon; K. Harima et alia) or planned with the Commercial Service (CS) on the Galileo constellation. Figure 1 (see inset photo, above right) shows the architecture of this demonstration, providing PPP via a Galileo E5b signal in real-time, through a geostationary satellite. This demonstration benefited from the opportunity that an EGNOS satellite in test was available, and that an E5b channel was free on the EGNOS payloads.
Complementarity Between MEO and GEO Based PPP Solutions
A demonstration of the PPP message being broadcast on the Galileo E6 central frequency was carried out by I. Fernandez et alia, and showed that broadcasting a PPP message through Medium Earth Orbit (MEO) satellites is meaningful. However, it also showed the weaknesses of such a scheme:
- A relatively high time latency causing decreased positioning performances;
- A low availability of the E6 message.
Adding a Geostationary Orbit (GEO) PPP broadcast channel to a Galileo MEO E6 channel could have the following advantages:
- A higher overall availability thanks to both frequency and spatial diversity. Indeed, the E6 frequency band is not part of the Aeronautical and Radio Navigation Satellite Service (ARNSS) band, and is more subject to interference than the E5b band. On the other hand, considering different types of environments, GEO signals may be masked in harsh environments like urban or deep urban situations. As GEO satellites are stationary, the receiver must be in an unmasked area towards the GEO. Another solution would be to involve differential measurements in the masked area with a second receiver. In such environments, MEO satellites have a clear advantage. It has to be noted that typically in urban areas, PPP is also accessible via wireless internet access such as 3G or Wi-Fi. In open sky environments, the GEO satellites have the advantage of providing a continuous service available in the whole GEO footprint;
- A higher geographic coverage thanks to the combination of MEO and GEO coverage, as MEO satellites offer higher latitudes coverage compared to GEO coverage;
- A higher data rate, as the PPP message can be broadcast with an incremental precision using both the E5b and E6 bandwidth. Using the GEO E5b bandwidth could alleviate the needs of bandwidth on GALILEO MEO E6 for high accuracy service, thus allowing more room for other commercial services like authentication service.
Most importantly, and apart from this end user service complementarity between MEO and GEO satellite-based PPP solutions, the E5b channel available today on EGNOS GEO satellites may be used in the future for several Galileo E6 CS testing ends. This is especially true as it is possible to use existing receivers compatible with Galileo E5b signals to process the PPP message by applying only a firmware update of the receiver, which greatly simplifies the needed infrastructure and thus allows for early testing of different possible Galileo E6 CS functionalities.
In this context, we propose to evaluate the feasibility of broadcasting a signal containing PPP information, via a Galileo signal through a GEO satellite, with a demonstration aiming at evaluating the obtained positioning performances in real conditions.
The demonstration principle consists of broadcasting an E5b signal containing value-added information into an ad-hoc user segment, using the SES Satellite-Based Augmentation System (SBAS) payload capacity to repeat such a signal. The value-added data incoming in real-time from a CNES hosted internet server are encapsulated in a message and signal structure similar to that of Galileo E5b.
Thales Alenia Space with the support of SES Networks implemented a preliminary demonstration of this capacity in early 2015. A second window of opportunity to broadcast the PPP signal through an EGNOS GEO payload was available in July 2016.
Following the context and demonstration presentation, this article describes the detailed test-bed architecture and presents results first obtained in factory and then in an on-site real time configuration.
GEO E5b SIS CHARACTERISTICS
GEO E5b SIS Structure
The E5b GEO signal center frequency is set to 5767.14 MHz for the uplink (NLES-to-Satellite RF link) and to 1207.14 MHz for the downlink (Satellite-to-users broadcast RF link). This is the same center frequency as that used for the Galileo E5b signals. Figure 2 (see inset photo, above right) shows the frequency plan used for this testbed, the resulting measured uplink EGNOS + PPP spectrum on site, and the spectral separation between the EGNOS L5 and the PPP E5b signals. A complete analysis of this spectral separation and interactions between both signals was assessed in H. Al Bitar et alia (2013).
The modulation used to generate the E5b signal is also the same as the one used for the nominal Galileo E5b signal, defined in the Galileo Open Service Signal In Space Interface Control Document (OS SIS ICD) (see Additional Resources). Namely a BPSK(10) modulation is used on two quadraphase channels: one data and one pilot. The data rate is the same as for Galileo E5b (250 sps).
The ranging codes are built from so-called primary and secondary codes by using a tiered codes construction (see Galileo OS SIS ICD).
The signal’s primary and secondary codes comply with the E5b ranging code characteristics. The Galileo PRN 38 as defined in the Galileo ICD is used. This PRN is not part of the Galileo PRNs that are assigned to Galileo satellites. Secondary codes CS41 and CS10088 as defined in the OS SIS ICD are allocated to the E5b GEO signal data and pilot components, respectively.
Tables 1 through 3 (see inset photo, above right) summarize the GEO E5b SIS structure and main RF characteristics.
It is important to note that the PPP corrections typically need a large bandwidth in order to achieve good performance, especially when providing corrections for several satellite constellations. Obviously, limiting the required data bandwidth is always necessary, due to the high cost of this scarce resource. But limiting the bandwidth may impact the resulting PPP performances such as solution accuracy and convergence time and the availability of PPP service to users. Thus a trade-off generally must be found between these two constraints.
For this demonstration, innovative compression techniques developed by the CNES were used to broadcast PPP corrections with the data rate available on one E5b Galileo like signal, i.e., 125 data bits/second, while keeping very good final accuracy and convergence time performances, as shown in the results presented later. These compression techniques are briefly described in the next paragraph.
GEO E5b PPP Message Characteristics
The E5b PPP message has the same structure as the Galileo E5b I/NAV message. The only difference is that the useful data bits of the Galileo E5b I/NAV message are replaced by the PPP corrections Radio Technical Commission for Maritime (RTCM) message, as described in Figure 3 (see inset photo, above right).
In the frame of this PPP demonstration campaign, the word type is set to 63, thus indicating a dummy message.
The PPP correction message contents are generated by the so-called CNES caster.
Indeed, in the framework of the International GNSS Service (IGS) Real Time Service (RTS) (see Additional Resources), CNES provides GNSS augmentation data in real-time. These data include the constellations’ orbits, clocks, code, and phase biases. The main goal of the participation in the IGS RTS for CNES is to promote a new precise point positioning technique that performs undifferenced ambiguity resolution (A. J. Van Dierendonck et alia; D. Laurichesse et alia (2006)). It allows for the positioning of an isolated receiver with centimeter level accuracy in real-time.
In the IGS RTS, the dissemination of the different quantities is performed by means of an open standard, the RTCM. The quantities are defined in a State Space Representation (SSR) (D. Laurichesse and A. Privat), as opposed to other techniques like RTK, which use an Observation State Representation.
Table 4 contains the different RTCM/SSR messages used by the CNES PPP demonstrator and available on the CLK91 mountpoint.
The RTCM standard is primarily designed for terrestrial communications and not with a very low bandwidth in mind. For example, the above-mentioned stream has a bandwidth of several kilobits/second, and is clearly not compatible with the bandwidth of the I/NAV E5b message of 186 bits every two seconds. Thus, an efficient compression scheme and a new message format need to be designed.
In order to compress the initial RTCM stream by a factor of 50, several ingredients are used. The chosen solution (inspired by other augmentation messages like those used in SBAS or JPL-GDGPS (see Additional Resources) is a trade-off between the available bandwidth and corrections latency, while maintaining the main characteristics of PPP, including ambiguity resolution:
- Selection of a reduced set (20) of satellites over the area of service (namely the European continent in this case). The satellites are selected upon their visibility and sorted by their elevation.
- Suppression of the code biases messages. Indeed, as the PPP is mainly a phase solution, code biases are not needed. In the user solution, code measurements are underweighted.
- Phase biases are directly applied to the clocks and do not need to be transmitted.
- Finally, each I/NAV message is comprised of:
- A “slow” part containing orbit corrections, their first order derivative, a raw clock, and the widelane bias for one satellite.
- A “fast” part containing accurate clock correction for four satellites.
With four clock corrections transmitted every two seconds, the set of 20
satellite clocks is actualized every 10 seconds. The entire cycle for
the orbit corrections is 40 seconds.
The compression module takes as input the CLK91 stream and sends the compressed stream to a new mountpoint created for this purpose on the CNES caster. It is then possible to access the compressed stream by simply pulling the new stream from the caster.
Figure 4 shows the gain in bandwidth brought by the compression algorithms, as measured by the independent BNC tool (again, see Additional Resources). The improvement is clearly visible.
On the user side, the PPP-Wizard open source software (Version 1.2) is used (D. Laurichesse). This tool is compatible with the RTCM real-time stream available at the IGS Real Time Service and provides centimeter level accuracy in real-time. It has been modified to support the decoding of the new compressed stream.
GEO E5b SIS Generation Scheme
The GEO E5b SIS is generated by an Earth station that is independent from EGNOS NLES. Two one-way links between the EGNOS NLES and the E5b generation Earth station were still needed in this PPP demonstrator for:
- A 10 megahertz input to the different E5b GEO SIS Earth generation station components
- A 1 PPS input for some of these components
These two links were maintained for the sake of E5b Earth station complexity and cost reduction. The different E5b Earth station possible architectures were thoroughly discussed by H. Al Bitar (2013).
DEMONSTRATION SETUP
We now describe the on-site demonstrator setup for the live tests. A description of specific setup related to factory tests follows.
On Site Setup
This section details the on-site setup. The demonstration took place in July 2016 at Betzdorf, Luxembourg, on the SES site. The PPP corrections are provided by the CNES PPP caster. Then, in the NLES E5b, the PPP corrections are encapsulated in the Galileo E5b message format, and generated via a Galileo E5b signal, with the PRN code 38. For the demonstration, the signal is uplinked via the C5 frequency on the SES ASTRA 5B GEO satellite. Finally, the Galileo E5b signal is broadcast via this GEO satellite over Europe, via the E5b frequency.
A commercial off-the-shelf (COTS) receiver is based at Toulouse in order to receive the Galileo E5b signal with the PPP corrections, broadcast by the GEO ASTRA 5B satellite. To be able to use these PPP corrections, the user also needs GNSS constellation measurements. In this demonstration, the PPP corrections for GLONASS and GPS are used.
Thus, the receiver needs to receive GNSS measurements from the GPS and GLONASS constellations.
The E5b demonstrator functional architecture is shown in Figure 5.
The demonstrator is composed of:
- The CNES PPP caster, in charge of the provision of the PPP corrections via internet,
- The NLES E5b, in charge of the Galileo E5b signal, in which the
PPP corrections are encapsulated, (Figure 6), This station is in turn
composed of : - A control PC developed by Thales Alenia Space for this dem
- A signal generator developed by Thales Alenia Space and Elta (NAVYS) providing the flexibility to generate nonstandard signals,
- An L-to-C band frequency converter,
- An RF adapter in order to ensure that the transmitted signal
quality complies with the uplink and downlink Signal In Space interface
requirements. It includes an analogic filter, attenuators and splitters
and combiners when needed. - The NLES G2, in charge of the provision of time (PPS) and
frequency (10 megahertz) references to the NLES E5b, along with the
generation of the EGNOS L1 and L5 signals, - The SES broadcast means, in charge of the broadcast of the signals
(EGNOS L1 and L5, and Galileo E5b) over Europe via the GEO ASTRA 5B
satellite, - An E5b analysis module, in charge of the verification of the emitted Galileo E5b signal, and
- A PPP solution module, in charge of the reception of the Galileo
E5b signal, in addition to the GPS and GLONASS measurements, in order to
compute the PPP solution.
The CNES PPP caster provides PPP corrections via an internet connection. Detailed information on the CNES PPP caster can be found in the Additional Resources section.
The NLES E5b Control PC has two main functions:
- It manages the data interface by communicating with the CNES caster, and
- It manages the real-time interface with the NAVYS GNSS signal
generator, by sending the real-time data message to NAVYS appropriately
formatted.
These functions are performed by:
- TPACQ (standing for Thales PPP ACQuisition), in charge of the
connection to the remote server, the extraction of the payload, its
convolutional encoding, the construction of a Galileo I/NAV-like format,
latency management, and providing a data message each and every second, - GATEWAY, in charge of receiving the messages and writing them in
the GCS hard drive. It sends commands to the GCS, writes synchronization
commands, and writes the navigation message.
The RF interface is managed by the NLES-E5b RF Adapter elements. This RF interface is configured based on the given SES RF interface requirements, and the GSA downlink signal quality and characteristics requirements. It allows for controlling the output signal center frequency, power, bandwidth, in and out of band interference, etc.
The RF adapter is composed of:
- An RF filter. This is used at the output of the NAVYS generator in
order to guarantee that the spectral characteristics of the L5
generated signal are compliant with the needed safety barriers for the
uplink signal. - An Advantech L to C tunable up-converter, borrowed from the NLES
G2 factory platform. This equipment, originally designed to up-convert
EGNOS L5 signals in the uplink transmission band with the desired
amplification level, perfectly fits the demonstrator needs because of
its passband. It performs the L5 to C5b frequency translation of the
signal generated by NAVYS.
The NLES G2 is the new generation of EGNOS NLES embedding the ability to generate L1/L5 dual-frequency GEO signals. As already stated, and in order to have a simplified architecture for the NLES E5b, it is foreseen for this station to share some outputs of the NLES G2, such as the 10 megahertz frequency reference and the 1 PPS signal.
The SES broadcast means include the uplink signal interface and the downlink signal interface. The uplink signal interface is a one way RF interface carrying the C5b signal to be uplinked to the GEO satellite. The power level must be adjusted so that, at the SES RF interface, the total power level in the C5 band is -5 dBm. In the demonstration configuration, the power of the C5b component equals -10 dBm. In order to obtain a resulting signal with a power of -5 dBm, the power of the C5a component must equal -6.5 dBm. This configuration is of high interest as authorities could dislike the idea of reducing the power budget allocated to the Safety of Life (SoL) component. The downlink signal interface is a one-way RF interface carrying the E5b signal received by the SES RF station from the ASTRA 5B satellite.
The E5b analysis module is composed of the Thales Alenia Space software receiver, GEMS, and a specific post-processing analysis tool, developed for the demonstration.
The PPP solution module is composed of a GNSS commercial off-the-shelf (COTS) receiver with a firmware patch to allow the processing of the Galileo PRN 38, and a PPP solution computation unit developed by CNES.
The GNSS receiver tracks the GPS and GLONASS constellation signals in order to provide dual-frequency GNSS measurements to the PPP solution computation unit (see Figure 7). In addition, the receiver tracks the Galileo E5b signal from satellite PRN38, corresponding to the E5b signal broadcast by the GEO ASTRA 5B satellite. As mentioned previously, this E5b signal provides the PPP corrections, associated with the GPS and GLONASS satellites and optimized for a user located in the GEO satellite ground track.
Factory Setup
Prior to the on-site demonstration, a comprehensive set of factory tests were performed.
The different objectives of this factory test campaign are recalled as follows:
- Integration of all the demonstrator elements,
- Verification of the feasibility of the demonstration,
- First assessment of the demonstrator performances,
- Demonstration that the demonstrator is compliant with SES requirements,
- Demonstration that the demonstrator does not jeopardize the EGNOS SoL operations.
During factory tests, a so-called GEO Payload Simulator was used to replace the GEO satellite. The GEO Payload Simulator simulated the uplink-GEO-downlink path of both L1 and L5 signals, and was used to generate the E5b signal uplink and downlink paths as well.
DEMONSTRATION RESULTS
Factory Live Tests Results
The factory test on Thales Alenia Space premises was performed on June 15, 2016. The conditions of the test were the same as those described in Figure 5, except that the GEO satellite was simulated by means of an RF payload simulator as previously stated.
Figure 8 shows the error of the PPP, obtained by computing the difference between the PPP module output and the accurate reference coordinates of the receiver antenna, projected in the local frame.
These results are representative of a PPP processing. After a first convergence phase of about one hour, the accuracy is less than 10 centimeters. Fourteen satellites is typical of the dual-constellation (GPS, GLONASS). After convergence, the horizontal accuracy has a Root Mean Square (RMS) error of seven centimeters. Up to six satellites have ambiguities estimated to their integer value. The overall latency is about 30 seconds and explains the short-term noise of the solution.
This successful result demonstrates the validity of the implementation.
On-Site Live Tests Results
The live experiment took place from July 21-27, 2016. The receiver was located on CNES premises, using a geodetic grade antenna on a roof of a building. The NLES E5b was installed on an SES site in Betzdorf, Luxembourg, together with the NLES G2 for the SES ASTRA 5B satellite.
On a typical one-day session (July 24, 2016), PPP results are identical to those obtained during the factory tests, in terms of convergence and accuracy (Figure 9):
After convergence, the RMS of the horizontal accuracy is approximately eight centimeters. The latency measured in this case is about 23 seconds. Note that the latency is mainly due to this testbed configuration, and will be reduced in any future deployment of such PPP corrections broadcast test.
In order to have a better understanding of the contribution of the GEO transfer function in terms of accuracy, the same measurements were processed using the RTCM realtime corrections, before the stream compression. The results are presented on Figure 10. The horizontal RMS is equal to two centimeters. We can deduce that the noise of the transfer function (compression and end-to-end latencies) is equal to seven-and-a-half centimeters.
Conclusion
The main and novel aspect of this article is obviously the implementation of a complete end-to-end GEO satellite-based PPP solution via real live tests.
A proof of concept was first assessed through a laboratory real-time testbed. Next, an on-site real-time end-to-end demonstration was held with different levels of implications of the concerned stakeholders (European GNSS Agency (GSA), SES, ESSP, CNES, and Thales Alenia Space).
The success of this demonstration first reminds us that an E5b non-SoL signal can co-exist with an SoL signal.
Second, and most importantly, the results presented here showed that with only 125 bits/second data rate available on a Galileo E5b-like message, the final accuracy and convergence time performance of the computed solution are still very satisfying (horizontal positioning error equal to eight centimeter RMS after a first convergence step of one hour).
This testbed further demonstrated that broadcasting an additional signal through an existing and transparent GEO payload requires neither heavy nor complex technical means. It is thus compatible with a possible fast deployment and could operate as a test platform for various functionalities to the upcoming CS E6 Galileo signal for example.
Ultimately, a GEO PPP broadcast channel and a Galileo MEO E6 channel used together could result in an improved accuracy service with better performance, thanks to an enhanced availability (frequency and spatial diversity), a higher geographic coverage, and a higher data rate.
Acknowledgements
We would like to thank the GSA (European GNSS Agency), ESSP, and SES engineering and operations teams for their very valuable support to E5b signal testing on SES’s EGNOS uplink station and ASTRA 5B EGNOS payload. We would also like to thank Septentrio for their support in providing a new firmware version of the PolaRx5 receiver allowing for tracking of the Galileo PRN 38 code.
Additional Resources
[1] Al Bitar, H., M. Raimondi, L. Ries, “NLES-NG: Augmenting EGNOS with an E5b Channel,” Proceedings of the 6th European Workshop on GNSS Signals and Signal Processing, Munich, December 2013
[2] Al Bitar, H., M. Raimondi, D. Kubrak, L. Ries, “Augmenting EGNOS with an E5b Channel,” Proceedings of The Institute of Navigation International Technical Meeting (ION ITM 2014), San Diego, CA, 2014
[3] Charlot, B., H. Delfour, D. Laurichesse, P. Lesage, “Efficient Message Coding To Broadcast PPP Corrections Through Satellite,” Proceedings of ISGNSS 2014, ICC Jeju, Korea, 2014
[4] Fernandez, E. C. I., I. Rodriguez, G. Tobias, J. D. Calle, E. Carbonell, G. Seco-Granados, J. Simon, R. Blasi, “Galileo’s Commercial Service, Testing GNSS High Accuracy and Authentication,” Inside GNSS, January/February 2015
[5] Galileo OS SIS ICD
[6] Harima, K. et alia, “Performance of Real-Time Precise Point Positioning using MADOCA-LEX Augmentation Messages,” International Federation of Surveyors Congress, Kuala Lumpur, Malaysia, 2014
[7] Heunecke, O. and H. Heister, “Worldwide Kinematic Positioning using the OmniSTAR HP and XP Services,” Institute of Geodesy, University of the Bundeswehr, Munich, 2010
[8] JPL GDGPS message
[9] Laurichesse, D., “The CNES Real-time PPP with Undifferenced Integer Ambiguity Resolution Demonstrator,” Proceedings of ION GNSS 2011, Portland, OR, September 2011
[10] Laurichesse, D., F. Mercier, J. P. Berthias, P. Broca, L. Cerri, “Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and its Application to PPP and Satellite Precise Orbit Determination,” NAVIGATION, Volume: 56, Issue: 2, Summer 2009
[11] Laurichesse, D. and A. Privat, “An Open-source PPP Client Implementation for the CNES PPP-WIZARD Demonstrator,” Proceedings of ION GNSS 2015, Tampa, FL, 2015
[12] SC-159, “Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment,” RTCA DO 229 D, Annex A, December 13, 2006
[13] Van Dierendonck, A. J. et alia, “Relationship between Allan Variances and Kalma Filter Parameters,” Proceedings of the 16th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, NASA Goddard Space Flight Center, pp 273–293.
[14] Wickramasinghe, C. H. and L. Samarakoon, “QZSS LEX Message Data for Precise Point Positioning,” Coordinates, A Monthly Magazine on Positioning, Navigation and Beyond, 2013
[15] https://igs.bkg.bund.de/ntrip/download, http://www.igs.org/rts, http://www.ppp-wizard.net, http://www.rtca.org
[16] http://www.igs.org/rts
[17] http://www.ppp-wizard.net
[18] http://www.rtca.org




